一种基于机器人的多点运物系统的制作方法
本公开涉及机器人应用,尤其涉及一种基于机器人的多点运物系统。
背景技术:
1、随着智能技术的发展,用户在酒店或办公楼宇等场景下购买零售商品的方式越来越方便。例如,用户可以选择外卖的方式来购买商品,也可以前往预设在该场景中的自动售货机上自行购买商品。若用户选择外卖的方式购买商品,一般需要较长的等待时间,而如果用户去自动售货机购买商品,虽然比外卖的方式更快买到商品,但同样需要花费一定的时间。而目前市场中还没有针对自动售货机这类近距离场景下商品售卖提供配送的产品或技术。
技术实现思路
1、有鉴于此,本公开实施例提供了一种基于机器人的多点运物系统,以解决现有技术中自动售货机售卖的商品无法进行配送,需要用户亲自前往购买的问题。
2、为实现上述目的,本公开采用的技术方案是:
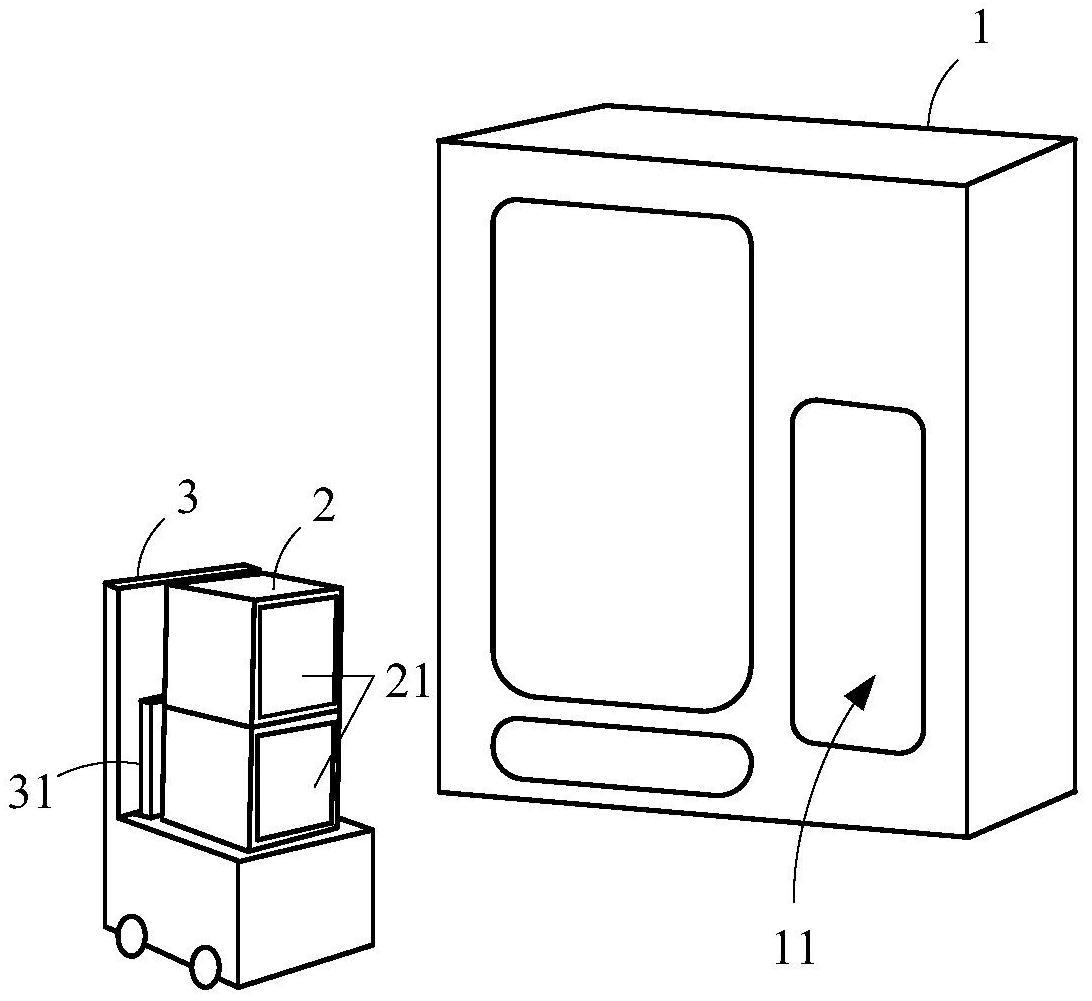
3、本公开实施例提供一种基于机器人的多点运物系统,包括:上仓、商品售卖柜和智能移动机器人;该上仓包括至少两个相互对接的储物格,每个该储物格设有自动开关门;该商品售卖柜设有安装该上仓的仓位,该商品售卖柜用于将用户在该商品售卖柜上选购的目标商品装入在该仓位上的上仓的储物格中;该智能移动机器人上设有上仓转移机构,该上仓转移机构与该上仓可拆卸连接;该智能移动机器人与该商品售卖柜通信连接,在该商品售卖柜将该目标商品装入在该仓位上的上仓的储物格的情况下,该商品售卖柜通知该智能移动机器人控制该上仓转移机构与该商品售卖柜上的上仓连接,并将该目标商品在内的上仓运送至目标位置,其中,目标位置包括该用户的位置。
4、在一个实施例中,该基于机器人的多点运物系统还包括:充电桩,该充电桩包括第一充电输出口和第二充电输出口,该第一充电输出口和第二充电输出口分别设置在该充电桩的两个不同平面上;该上仓上设有第一充电接收口,该第一充电接收口与该第一充电输出口对接;该智能移动机器人上设有第二充电接收口,该第二充电接收口与该第二充电输出口对接。
5、在一个实施例中,该第一充电输出口为无线充电信号发射面板,该第一充电接收口为无线充电信号接收面板。
6、在一个实施例中,该第二充电输出口和第二充电接收口为互相对接的金属触点。
7、在一个实施例中,该基于机器人的多点运物系统还包括外置架,设有至少一个平台,各该平台并排设置,在该平台上放置有上仓时,该机器人能够控制该上仓转移机构与该平台上的上仓可拆卸连接。
8、在一个实施例中,该上仓转移机构包括:连接板,用于与该上仓可拆卸连接;伸缩支架,该伸缩支架的一端与该智能移动机器人固定连接,该伸缩支架的另一端与该连接板固定连接;驱动装置,该驱动装置与该连接板连接,并能够沿该伸缩支架的伸缩方向移动的驱动该连接板与该上仓连接或者分开。
9、在一个实施例中,该连接板设有电磁铁,该上仓设有至少一个磁吸面,使该电磁铁与该磁吸面磁性连接。
10、在一个实施例中,该连接板设有真空吸盘,该上仓的侧面设有至少一个平面,使该真空吸盘能够吸附在该平面上。
11、在一个实施例中,该智能移动机器人上还设有底座,该底座位于该伸缩支架的伸缩方向的下方。
12、在一个实施例中,该上仓的各个储物格之间通过卡扣结构进行对接。
13、本公开实施例与现有技术相比存在的有益效果是:通过在商品售卖柜上设置盛装售卖商品的上仓,使商品售卖柜将用户选购的售卖商品装入上仓的储物格,再由智能移动机器人控制上仓转移机构将上仓从商品售卖柜上取出,并转移至用户的位置,实现了对用户在该商品售卖柜上选购的目标商品的自动配送,节省了用户亲自前往商品售卖柜购买商品的时间;并且,由于上仓包括有多个储物格,能够一次装载多个用户选购的目标商品,从而使得智能移动机器人能够一次进行多个用户位置的运物配送。
技术特征:
1.一种基于机器人的多点运物系统,其特征在于,包括:上仓、商品售卖柜和智能移动机器人;
2.根据权利要求1所述的基于机器人的多点运物系统,其特征在于,所述基于机器人的多点运物系统还包括:
3.根据权利要求2所述的基于机器人的多点运物系统,其特征在于,所述第一充电输出口为无线充电信号发射面板,所述第一充电接收口为无线充电信号接收面板。
4.根据权利要求2所述的基于机器人的多点运物系统,其特征在于,所述第二充电输出口和第二充电接收口为互相对接的金属触点。
5.根据权利要求1所述的基于机器人的多点运物系统,其特征在于,所述基于机器人的多点运物系统还包括:
6.根据权利要求1所述的基于机器人的多点运物系统,其特征在于,所述上仓转移机构包括:
7.根据权利要求6所述的基于机器人的多点运物系统,其特征在于,所述连接板设有电磁铁,所述上仓设有至少一个磁吸面,使所述电磁铁与所述磁吸面磁性连接。
8.根据权利要求6所述的基于机器人的多点运物系统,其特征在于,所述连接板设有真空吸盘,所述上仓的侧面设有至少一个平面,使所述真空吸盘能够吸附在所述平面上。
9.根据权利要求6所述的基于机器人的多点运物系统,其特征在于,所述智能移动机器人上还设有底座,所述底座位于所述伸缩支架的伸缩方向的下方。
10.根据权利要求1-9任一项所述的基于机器人的多点运物系统,其特征在于,所述上仓的各个储物格之间通过卡扣结构进行对接。
技术总结
本公开涉及机器人应用技术领域,提供了一种基于机器人的多点运物系统,包括:上仓、商品售卖柜和智能移动机器人,上仓包括至少两个相互对接且均设有自动开关门的储物格,商品售卖柜设有仓位,商品售卖柜用于将用户选购的目标商品装入在仓位上的上仓的储物格中,智能移动机器人设有上仓转移机构,智能移动机器人与商品售卖柜通信连接,商品售卖柜通知智能移动机器人控制上仓转移机构与商品售卖柜上的上仓连接,并将装有目标商品在的上仓运送至目标位置。本公开通过智能移动机器人来将用户远程选购在商品售卖柜上售卖的商品自动运送至用户的位置,节省了用户前往商品售卖柜购买商品的时间。
技术研发人员:赵博学,支涛
受保护的技术使用者:河南云迹智能技术有限公司
技术研发日:20220331
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!