一种机器人快速启动装置的制作方法
1.本实用新型属于机器人技术领域,具体涉及一种机器人快速启动装置。
背景技术:
2.现今,机器人的使用在各个领域较为常见,机器人能够半自主或全自主工作的智能机器,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,为了驱动机器人通常会使用到机器人示教器。
3.目前,现有的abb机器人在使用时,通常需要使用到abb机器人示教器进行开机运行,abb机器人示教器的安装和驱动速度较慢,不能跳过abb机器人示教器进行快速启动处理。
4.因此,针对上述日常机器人快速启动装置在使用后不能快速启动的问题,亟需得到解决,以改善该装置的实用性。
技术实现要素:
5.(1)要解决的技术问题
6.针对现有技术的不足,本实用新型的目的在于提供一种机器人快速启动装置,该机器人快速启动装置旨在解决现有技术下abb机器人示教器的安装和驱动速度较慢,不能跳过abb机器人示教器进行快速启动处理的技术问题。
7.(2)技术方案
8.为了解决上述技术问题,本实用新型提供了这样一种机器人快速启动装置,该快速启动装置包括设备外壳;所述设备外壳的内侧设置有启动组件,所述设备外壳的底端固定安装有螺纹接头,所述螺纹接头的外侧设置有锁紧组件,所述设备外壳的内侧设置有设备主体,所述设备主体与所述设备外壳卡合连接,所述设备主体的上端与所述启动组件的底端相互连接,所述锁紧组件的内侧设置有垫块,所述设备外壳的外侧开设有防滑纹,所述设备外壳的外侧开设有外槽,所述设备外壳的外侧开设有分隔槽。
9.使用本技术方案的机器人快速启动装置时,通过将设备主体沿着设备外壳卡入,锁紧组件与螺纹接头的螺纹连接对设备主体的位置进行固定,通过启动组件插入abb机器人外侧卡扣,通过防滑纹、外槽、分隔槽的设置起到防滑效果,从而实现了对abb机器人进行快速启动。
10.优选地,所述启动组件的内部包括有圆盘,所述圆盘设置于所述设备外壳的内侧,所述圆盘与所述设备外壳卡合连接,通过圆盘与设备外壳的卡合连接对圆盘进行限位。
11.进一步的,所述启动组件的内部包括有固定块,所述固定块固定安装在所述圆盘的外侧,所述设备外壳的内侧固定安装有固定块,所述圆盘与所述固定块卡合连接,通过固定块沿着设备外壳内侧的卡环卡入,对圆盘的位置进行安装。
12.再进一步的,所述启动组件的内部包括有安装孔,所述安装孔开设于所述圆盘的外侧,所述安装孔开设有多组,所述安装孔的内侧固定安装有金属片,通过安装孔的设置对
金属片进行安装处理。
13.优选地,所述锁紧组件的内部包括有螺纹盖,所述螺纹盖设置于所述螺纹接头的外侧,所述螺纹盖与所述螺纹接头螺纹连接,所述螺纹盖的内侧与所述垫块的底端相互连接,将螺纹盖沿着螺纹接头旋转拧入,通过垫块的设置对设备主体的位置进行固定。
14.进一步的,所述锁紧组件的内部包括有防滑槽,所述防滑槽开设于所述螺纹盖的外侧,所述防滑槽开设有多组定,通过防滑槽的设置便于对螺纹盖进行防滑处理。
15.(3)有益效果
16.与现有技术相比,本实用新型的有益效果在于:本实用新型的机器人快速启动装置通过固定块沿着设备外壳内侧的卡环卡入,对圆盘的位置进行安装,通过将设备主体沿着设备外壳卡入,将螺纹盖沿着螺纹接头旋转拧入,通过垫块的设置对设备主体的位置进行固定,通过防滑槽的设置便于对螺纹盖进行防滑处理,通过安装孔的设置对金属片进行安装处理,通过金属片插入abb机器人外侧卡扣,通过防滑纹、外槽、分隔槽的设置起到防滑效果,从而实现了对abb机器人进行快速启动。
附图说明
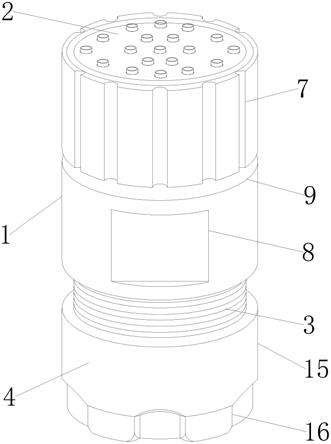
17.图1为本实用新型一种具体实施方式立体的结构示意图;
18.图2为本实用新型一种具体实施方式启动组件2的结构示意图;
19.图3为本实用新型一种具体实施方式剖面的结构示意图。
20.附图中的标记为:1、设备外壳;2、启动组件;3、螺纹接头;4、锁紧组件;5、设备主体;6、垫块;7、防滑纹;8、外槽;9、分隔槽;10、圆盘;11、固定块;12、卡环;13、安装孔;14、金属片;15、螺纹盖;16、防滑槽。
具体实施方式
21.实施例1
22.本具体实施方式是用于机器人快速启动装置,其立体结构示意图如图1所示,其启动组件2结构示意图如图2所示,该快速启动装置包括设备外壳1;设备外壳1的内侧设置有启动组件2,设备外壳1的底端固定安装有螺纹接头3,螺纹接头3的外侧设置有锁紧组件4,设备外壳1的内侧设置有设备主体5,设备主体5与设备外壳1卡合连接,设备主体5的上端与启动组件2的底端相互连接,锁紧组件4的内侧设置有垫块6,设备外壳1的外侧开设有防滑纹7,设备外壳1的外侧开设有外槽8,设备外壳1的外侧开设有分隔槽9。
23.针对本具体实施方式,设备外壳1的形状结构根据实际应用情况进行设定,如设备外壳1可以为矩形结构、弧形结构、多边形结构等。
24.其中,启动组件2的内部包括有圆盘10,圆盘10设置于设备外壳1的内侧,圆盘10与设备外壳1卡合连接,通过圆盘10与设备外壳1的卡合连接对圆盘10进行限位,启动组件2的内部包括有固定块11,固定块11固定安装在圆盘10的外侧,设备外壳1的内侧固定安装有固定块11,圆盘10与固定块11卡合连接,通过固定块11沿着设备外壳1内侧的卡环12卡入,对圆盘10的位置进行安装。
25.本具体实施方式是用于机器人快速启动装置,其剖面结构示意图如图3所示,启动组件2的内部包括有安装孔13,安装孔13开设于圆盘10的外侧,安装孔13开设有多组,安装
孔13的内侧固定安装有金属片14,通过安装孔13的设置对金属片14进行安装处理。
26.同时,锁紧组件4的内部包括有螺纹盖15,螺纹盖15设置于螺纹接头3的外侧,螺纹盖15与螺纹接头3螺纹连接,螺纹盖15的内侧与垫块6的底端相互连接,将螺纹盖15沿着螺纹接头3旋转拧入,通过垫块6的设置对设备主体5的位置进行固定,锁紧组件4的内部包括有防滑槽16,防滑槽16开设于螺纹盖15的外侧,防滑槽16开设有多组定,通过防滑槽16的设置便于对螺纹盖15进行防滑处理。
27.使用本技术方案的机器人快速启动装置时,通过固定块11沿着设备外壳1内侧的卡环12卡入,对圆盘10的位置进行安装,通过将设备主体5沿着设备外壳1卡入,将螺纹盖15沿着螺纹接头3旋转拧入,通过垫块6的设置对设备主体5的位置进行固定,通过防滑槽16的设置便于对螺纹盖15进行防滑处理,通过安装孔13的设置对金属片14进行安装处理,通过金属片14插入abb机器人外侧卡扣,通过防滑纹7、外槽8、分隔槽9的设置起到防滑效果,从而实现了对abb机器人进行快速启动。
技术特征:
1.一种机器人快速启动装置,该快速启动装置包括设备外壳;其特征在于,所述设备外壳的内侧设置有启动组件,所述设备外壳的底端固定安装有螺纹接头,所述螺纹接头的外侧设置有锁紧组件,所述设备外壳的内侧设置有设备主体,所述设备主体与所述设备外壳卡合连接,所述设备主体的上端与所述启动组件的底端相互连接,所述锁紧组件的内侧设置有垫块,所述设备外壳的外侧开设有防滑纹,所述设备外壳的外侧开设有外槽,所述设备外壳的外侧开设有分隔槽。2.根据权利要求1所述的一种机器人快速启动装置,其特征在于,所述启动组件的内部包括有圆盘,所述圆盘设置于所述设备外壳的内侧,所述圆盘与所述设备外壳卡合连接。3.根据权利要求2所述的一种机器人快速启动装置,其特征在于,所述启动组件的内部包括有固定块,所述固定块固定安装在所述圆盘的外侧,所述设备外壳的内侧固定安装有固定块,所述圆盘与所述固定块卡合连接。4.根据权利要求3所述的一种机器人快速启动装置,其特征在于,所述启动组件的内部包括有安装孔,所述安装孔开设于所述圆盘的外侧,所述安装孔开设有多组,所述安装孔的内侧固定安装有金属片。5.根据权利要求1所述的一种机器人快速启动装置,其特征在于,所述锁紧组件的内部包括有螺纹盖,所述螺纹盖设置于所述螺纹接头的外侧,所述螺纹盖与所述螺纹接头螺纹连接,所述螺纹盖的内侧与所述垫块的底端相互连接。6.根据权利要求5所述的一种机器人快速启动装置,其特征在于,所述锁紧组件的内部包括有防滑槽,所述防滑槽开设于所述螺纹盖的外侧,所述防滑槽开设有多组。
技术总结
本实用新型公开了一种机器人快速启动装置,该机器人快速启动装置旨在解决现有技术下abb机器人示教器的安装和驱动速度较慢,不能跳过abb机器人示教器进行快速启动处理的技术问题。该快速启动装置包括设备外壳;所述设备外壳的内侧设置有启动组件,所述设备外壳的底端固定安装有螺纹接头,所述螺纹接头的外侧设置有锁紧组件,所述设备外壳的内侧设置有设备主体,所述设备主体与所述设备外壳卡合连接。该机器人快速启动装置只需通过将设备主体沿着设备外壳卡入,锁紧组件与螺纹接头的螺纹连接对设备主体的位置进行固定,通过启动组件插入abb机器人外侧卡扣,通过防滑纹、外槽、分隔槽的设置起到防滑效果,从而实现了对abb机器人进行快速启动。人进行快速启动。人进行快速启动。
技术研发人员:孔一腾
受保护的技术使用者:苏州牧歌机器人有限公司
技术研发日:2022.05.13
技术公布日:2022/9/26
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1