一种电路板垂直进出拾取机械手的制作方法
1.本实用新型涉及电路板生产线技术领域,尤其是涉及一种电路板垂直进出拾取机械手。
背景技术:
2.现有的电路生产线中为确保电路板的生产产量以及效率,通常采用篮框同时装载多个电路板以实现电路板在多个工位之间转料,传统的电路生产线通常采用人工或者简单的机械结构将电路板插入篮框内,其存在电路板入框效率低以及电路板晃动不便入框等缺陷,因此有必要予以改进。
技术实现要素:
3.针对现有技术存在的不足,本实用新型的目的是提供一种电路板垂直进出拾取机械手,能够快速精准拾取电路板并将电路板垂直输入篮框内。
4.为了实现上述目的,本实用新型所采用的技术方案是:一种电路板垂直进出拾取机械手,其包括立式基座、滑动安装于立式基座的电路板拾取单元、用于电路板拾取单元沿着立式基座升降滑动的升降驱动源以及分别设于电路板拾取单元左右两侧的两个辅助限位组件,各个辅助限位组件包括安装于立式基座的辅助基座、固定安装辅助基座的固定限位板、活动铰接于辅助基座的活动限位板以及安装于辅助基座的第一动力源,第一动力源用于驱动活动限位板与固定限位板保持对合,在升降驱动源驱动电路板拾取单元升降以使电路板垂直进出料框时,对合后的活动限位板与固定限位板形成一用于辅助限位电路板侧边的限位间隔。
5.进一步的技术方案中,还包括安装于外界机架并带动立式基座横移拾料的横移驱动源,横移的立式基座带动电路板拾取单元移动到上料位置处拾取电路板或者移动到下料工位处下放电路板。
6.进一步的技术方案中,所述电路板拾取单元包括活动安装于立式基座的纵向滑座、固定安装于纵向滑座的横向安装座以及间隔设于横向安装座的多个夹料头。
7.进一步的技术方案中,所述夹料头选用夹料手指气缸。
8.进一步的技术方案中,所述电路板拾取单元还包括滑动安装于立式基座并传动连接于升降驱动源的滑移架,所述纵向滑座活动安装于滑移架,纵向滑座与滑移架之间还安装有缓冲弹性件。
9.进一步的技术方案中,所述升降驱动源选用拖链传动机构。
10.进一步的技术方案中,所述第一动力源包括推拉气缸以及传动连接于推拉气缸的传动转板,传动转板经由转轴铰接于辅助基座,活动限位板固定安装于辅助基座。
11.采用上述结构后,本实用新型和现有技术相比所具有的优点是:
12.这样的结构设计巧妙,在升降驱动源驱动电路板拾取单元升降时,升降的电路板拾取单元将所拾取的电路板垂直进出料框,此时,第一动力源带动活动限位板转动以与固
定限位板保持对合,对合后的活动限位板与固定限位板形成一限位间隔,电路板在垂直方向升降时,其两侧在两个限位间隔的限位作用下避免出现左右晃动等情况。
附图说明
13.下面结合附图和实施例对本实用新型进一步说明。
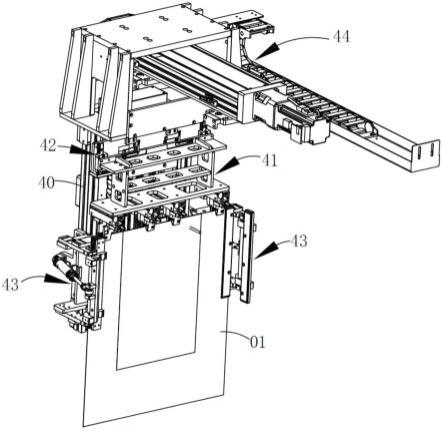
14.图1是本实用新型的结构示意图;
15.图2是电路板拾取单元以及辅助限位组件的结构示意图;
16.图3是辅助限位组件的结构示意图。
具体实施方式
17.以下仅为本实用新型的较佳实施例,并不因此而限定本实用新型的保护范围。
18.如图1至3所示,本实用新型提供的一种电路板垂直进出拾取机械手,其包括立式基座40、滑动安装于立式基座40的电路板拾取单元41、用于电路板拾取单元41沿着立式基座40升降滑动的升降驱动源42以及分别设于电路板拾取单元41左右两侧的两个辅助限位组件43,各个辅助限位组件43包括安装于立式基座40的辅助基座430、固定安装辅助基座430的固定限位板431、活动铰接于辅助基座430的活动限位板432以及安装于辅助基座430的第一动力源433,第一动力源433用于驱动活动限位板432与固定限位板431保持对合;这样的结构设计巧妙,在升降驱动源42驱动电路板拾取单元41升降时,升降的电路板拾取单元41将所拾取的电路板01垂直进出料框,此时,第一动力源433带动活动限位板432转动以与固定限位板431保持对合,对合后的活动限位板432与固定限位板431形成一限位间隔,电路板01在垂直方向升降时,其两侧在两个限位间隔的限位作用下避免出现左右晃动等情况。
19.具体的,还包括安装于外界机架并带动立式基座40横移拾料的横移驱动源44,横移的立式基座40带动电路板拾取单元41移动到上料位置处拾取电路板01或者移动到下料工位处下放电路板01。
20.具体的,所述电路板拾取单元41包括活动安装于立式基座40的纵向滑座410、固定安装于纵向滑座410的横向安装座411以及间隔设于横向安装座411的多个夹料头412。其中,所述夹料头412选用夹料手指气缸,其动作响应速度快,实现快速取放电路板01。
21.具体的,所述电路板拾取单元41还包括滑动安装于立式基座40并传动连接于升降驱动源42的滑移架413,所述纵向滑座410活动安装于滑移架413,纵向滑座410与滑移架413之间还安装有缓冲弹性件;在电路板拾取单元41将拾取的电路板01插入框内时,缓冲弹性件起到缓冲作用,避免出现伤板等情况。
22.具体的,所述升降驱动源42选用拖链传动机构,这样的结构设计传动稳定性能佳。
23.具体的,所述第一动力源433包括推拉气缸4330以及传动连接于推拉气缸4330的传动转板4331,传动转板4331经由转轴4332铰接于辅助基座430,活动限位板432固定安装于辅助基座430。
24.以上内容仅为本实用新型的较佳实施例,对于本领域的普通技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本实用新型的限制。
技术特征:
1.一种电路板垂直进出拾取机械手,其特征在于:包括立式基座(40)、滑动安装于立式基座(40)的电路板拾取单元(41)、用于电路板拾取单元(41)沿着立式基座(40)升降滑动的升降驱动源(42)以及分别设于电路板拾取单元(41)左右两侧的两个辅助限位组件(43),各个辅助限位组件(43)包括安装于立式基座(40)的辅助基座(430)、固定安装辅助基座(430)的固定限位板(431)、活动铰接于辅助基座(430)的活动限位板(432)以及安装于辅助基座(430)的第一动力源(433),第一动力源(433)用于驱动活动限位板(432)与固定限位板(431)保持对合,在升降驱动源(42)驱动电路板拾取单元(41)升降以使电路板(01)垂直进出料框时,对合后的活动限位板(432)与固定限位板(431)形成一用于辅助限位电路板(01)侧边的限位间隔。2.根据权利要求1所述的一种电路板垂直进出拾取机械手,其特征在于:还包括安装于外界机架并带动立式基座(40)横移拾料的横移驱动源(44),横移的立式基座(40)带动电路板拾取单元(41)移动到上料位置处拾取电路板(01)或者移动到下料工位处下放电路板(01)。3.根据权利要求1所述的一种电路板垂直进出拾取机械手,其特征在于:所述电路板拾取单元(41)包括活动安装于立式基座(40)的纵向滑座(410)、固定安装于纵向滑座(410)的横向安装座(411)以及间隔设于横向安装座(411)的多个夹料头(412)。4.根据权利要求3所述的一种电路板垂直进出拾取机械手,其特征在于:所述夹料头(412)选用夹料手指气缸。5.根据权利要求3所述的一种电路板垂直进出拾取机械手,其特征在于:所述电路板拾取单元(41)还包括滑动安装于立式基座(40)并传动连接于升降驱动源(42)的滑移架(413),所述纵向滑座(410)活动安装于滑移架(413),纵向滑座(410)与滑移架(413)之间还安装有缓冲弹性件。6.根据权利要求1所述的一种电路板垂直进出拾取机械手,其特征在于:所述升降驱动源(42)选用拖链传动机构。7.根据权利要求1所述的一种电路板垂直进出拾取机械手,其特征在于:所述第一动力源(433)包括推拉气缸(4330)以及传动连接于推拉气缸(4330)的传动转板(4331),传动转板(4331)经由转轴(4332)铰接于辅助基座(430),活动限位板(432)固定安装于辅助基座(430)。
技术总结
本实用新型公开了一种电路板垂直进出拾取机械手,其包括立式基座、滑动安装于立式基座的电路板拾取单元、用于电路板拾取单元沿着立式基座升降滑动的升降驱动源以及分别设于电路板拾取单元左右两侧的两个辅助限位组件,各个辅助限位组件包括安装于立式基座的辅助基座、固定安装辅助基座的固定限位板、活动铰接于辅助基座的活动限位板以及安装于辅助基座的第一动力源,第一动力源用于驱动活动限位板与固定限位板保持对合,在升降驱动源驱动电路板拾取单元升降以使电路板垂直进出料框时,对合后的活动限位板与固定限位板形成一用于辅助限位电路板侧边的限位间隔。本实用新型能够快速精准拾取电路板并将电路板垂直输入篮框内。框内。框内。
技术研发人员:陈曲剑 陈玉昆 颜朝信
受保护的技术使用者:迅得机械(东莞)有限公司
技术研发日:2022.05.30
技术公布日:2022/10/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1