一种远距离多人测温机器人的制作方法
1.本实用新型涉及测温结构领域,特别是涉及一种远距离多人测温机器人。
背景技术:
2.传统的同类多人测温设备,一般采用外置黑体校准测温精度,受外界环境影响很大,对场地和安装人员要求高,都为固定式,需外接电源并且有些要外置显示器,无法自动跟随、主动巡检、自主充电,无黑体校准,测温精度只能到
±
0.5。
3.在中国专利cn202111537946.8中,介绍了一体化智能巡检多人测温装置,其中智能动态多人测温主体采用热成像无感动态测温、人脸检测识别、黑体温度矫正多技术融合,优化人脸测温算法,使多人测温更精准,更迅速,然而在本领域的技术人员在实际操作中发现:现有结构中人像采集组件的一次采集目标人群较少,很大程度上影响检测效率。
技术实现要素:
4.为了克服现有技术的不足,本实用新型提供一种远距离多人测温机器人,通过设置的摄像头和成像模块结构,使用者可以通过操作控制面板将二者之间的角度向内进行偏转,内部的气动杆推动安装框的一侧向内偏转,提高两组结构之间的重合视野范围,进而提高范围内一次性可测试的目标个数,提高工作效率。
5.为解决上述技术问题,本实用新型提供如下技术方案:一种远距离多人测温机器人,包括底箱,所述底箱的顶端设置有显示屏,所述显示屏的顶端设置有成像组件,所述成像组件中开设有成像孔结构,且两组成像孔结构内均活动设置有摄像头和成像模块,所述摄像头和成像模块的一端均与气动杆的输出端连接固定。
6.作为本实用新型的一种优选技术方案,所述成像组件和摄像头的外侧均设置有安装框每组所述安装框的上下两端均设置有转轴,所述转轴均与安装框活动设置,所述安装框的外侧均设置有接触头,所述接触头与气动杆的输出端活动卡设,所述气动杆与底箱中的控制结构电性连接。
7.作为本实用新型的一种优选技术方案,每组所述安装框可较与水平线向内偏转15
°
。
8.作为本实用新型的一种优选技术方案,所述摄像头为rgb摄像头,所述成像模块为红外热成像模块。
9.作为本实用新型的一种优选技术方案,每组所述接触头均设置于安装框的外侧。
10.作为本实用新型的一种优选技术方案,所述摄像头和成像模块之间的距离为可接受范围内最小值。
11.与现有技术相比,本实用新型能达到的有益效果是:
12.本装置中,通过设置的摄像头和成像模块结构,使用者可以通过操作控制面板将二者之间的角度向内进行偏转,内部的气动杆推动安装框的一侧向内偏转,提高两组结构之间的重合视野范围,进而提高范围内一次性可测试的目标个数,提高工作效率。
附图说明
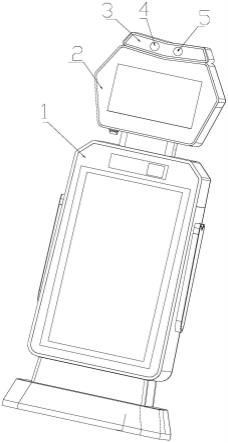
13.图1为本实用新型的结构示意图;
14.图2为本实用新型的结构原理图;
15.图3为本实用新型的成像组件的结构剖面图。
16.其中:1、底箱;2、显示屏;3、成像组件;31、气动杆;32、安装框;33、转轴;34、接触头;4、摄像头;5、成像模块。
具体实施方式
17.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本实用新型,但下述实施例仅仅为本实用新型的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其它实施例,都属于本实用新型的保护范围。下述实施例中的实验方法,如无特殊说明,均为常规方法,下述实施例中所用的材料、试剂等,如无特殊说明,均可从商业途径得到。
18.实施例:
19.如图1-3所示,本实用新型提供一种远距离多人测温机器人,包括底箱1,底箱1的顶端设置有显示屏2,显示屏2的顶端设置有成像组件3,成像组件3中开设有成像孔结构,且两组成像孔结构内均活动设置有摄像头4和成像模块5,摄像头4和成像模块5的一端均与气动杆31的输出端连接固定。
20.通过设置的摄像头4和成像模块5结构,使用者可以通过操作控制面板将二者之间的角度向内进行偏转,内部的气动杆31推动安装框32的一侧向内偏转,提高两组结构之间的重合视野范围,进而提高范围内一次性可测试的目标个数,提高工作效率。
21.在其他实施例中,成像组件3和摄像头4的外侧均设置有安装框32每组安装框32的上下两端均设置有转轴33,转轴33均与安装框32活动设置,安装框32的外侧均设置有接触头34,接触头34与气动杆31的输出端活动卡设,气动杆31与底箱1中的控制结构电性连接。
22.在其他实施例中,每组安装框32可较与水平线向内偏转15
°
。
23.将两个安装框32在水平方向上向内侧中心点各旋转相同的一定角度,这样也使得两者重合的视野场景更大。
24.在其他实施例中,摄像头4为rgb摄像头,成像模块5为红外热成像模块。
25.在其他实施例中,每组接触头34均设置于安装框32的外侧。
26.在其他实施例中,摄像头4和成像模块5之间的距离为可接受范围内最小值。
27.在不影响外观结构美观的情况下,使rgb摄像头和红外热成像模块在水平方向上尽量靠近,即下图中的距离尽量缩小,这样可使两者重合的视野场景更大。
28.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
29.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.一种远距离多人测温机器人,包括底箱(1),其特征在于:所述底箱(1)的顶端设置有显示屏(2),所述显示屏(2)的顶端设置有成像组件(3),所述成像组件(3)中开设有成像孔结构,且两组成像孔结构内均活动设置有摄像头(4)和成像模块(5),所述摄像头(4)和成像模块(5)的一端均与气动杆(31)的输出端连接固定。2.根据权利要求1所述的一种远距离多人测温机器人,其特征在于:所述成像组件(3)和摄像头(4)的外侧均设置有安装框(32)每组所述安装框(32)的上下两端均设置有转轴(33),所述转轴(33)均与安装框(32)活动设置,所述安装框(32)的外侧均设置有接触头(34),所述接触头(34)与气动杆(31)的输出端活动卡设,所述气动杆(31)与底箱(1)中的控制结构电性连接。3.根据权利要求2所述的一种远距离多人测温机器人,其特征在于:每组所述安装框(32)可较与水平线向内偏转15
°
。4.根据权利要求1所述的一种远距离多人测温机器人,其特征在于:所述摄像头(4)为rgb摄像头,所述成像模块(5)为红外热成像模块。5.根据权利要求2所述的一种远距离多人测温机器人,其特征在于:每组所述接触头(34)均设置于安装框(32)的外侧。6.根据权利要求1所述的一种远距离多人测温机器人,其特征在于:所述摄像头(4)和成像模块(5)之间的距离为可接受范围内最小值。
技术总结
本实用新型公开了一种远距离多人测温机器人,包括底箱,底箱的顶端设置有显示屏,显示屏的顶端设置有成像组件,成像组件中开设有成像孔结构,且两组成像孔结构内均活动设置有摄像头和成像模块,摄像头和成像模块的一端均与气动杆的输出端连接固定,成像组件和摄像头的外侧均设置有安装框每组安装框的上下两端均设置有转轴,转轴均与安装框活动设置,安装框的外侧均设置有接触头,接触头与气动杆的输出端活动卡设,气动杆与底箱中的控制结构电性连接,使用者可以通过操作控制面板将二者之间的角度向内进行偏转,内部的气动杆推动安装框的一侧向内偏转,提高两组结构之间的重合视野范围,进而提高范围内一次性可测试的目标个数,提高工作效率。提高工作效率。提高工作效率。
技术研发人员:程鹏 余小云
受保护的技术使用者:福盈科技(深圳)有限公司
技术研发日:2022.06.16
技术公布日:2022/11/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1