多关节液压机械臂的制作方法
1.本实用新型属于液压机械臂技术领域,具体涉及一种多关节液压机械臂。
背景技术:
2.现有技术的多关节液压机械臂,如专利号为cn201721480892.5的实用新型,公开了一种多关节液压机械臂,包括液压控制组件和连杆组件,连杆组件包括六个依次通过旋转关节连接的第一连杆组件、第二连杆组件、第三连杆组件、第四连杆组件、第五连杆组件和第六连杆组件,每个旋转关节均与一个液压油缸连接,每个旋转关节上均安装有编码器;第五连杆组件的前端装有力传感器,第六连杆组件的前端设置有双手指爪手,爪手的手指通过连杆机构与一夹手油缸连接;各个液压油缸的油路均与液压控制组件连接。能够360度旋转,旋转自由度高,但是该类多关节液压机械臂的旋转都是靠第一连杆组件旋转实现的,其他连杆组件只能直线朝某个固定方向的伸展/折叠,当某些比较复杂的工作环境,第一连杆组件不方便旋转的时候,就限制了多关节机械臂的使用自由度。
技术实现要素:
3.本实用新型针对现有技术中的多关节液压机械臂只有一个关节能够旋转移位,其他关节只能朝某个固定方向伸展/折叠的缺点,提出了一种多关节液压机械臂。
4.本实用新型的的发明目的是通过以下技术方案实现的:一种多关节液压机械臂, 包括回转结构,所述回转结构上转动连接有大臂,大臂上转动连接有小臂,大臂和小臂都在为同一方向上转动,小臂上转动连接有方向转换臂,方向转换臂上转动连接有爪手结构。
5.上述方案中,大臂和小臂的转动方向固定为一个方向,爪手结构需要不同于大臂或小臂方向的位置转动的话就需要回转结构转动来带动,如果回转结构不方便转动,通过方向转换臂将小臂的转动方向转换为回转结构的转换方向,使得爪手结构在回转结构不转动的情况下也能部分实现回转结构转动才能实现的位置转动。
6.作为优选,所述回转结构包括旋转盘,旋转盘上固定连接有底座,底座上转动连接有大臂。
7.作为优选,所述底座上固定连接有大臂安装座,大臂安装座上通过转动轴转动连接有大臂,大臂的另一端转动连接有小臂,大臂安装座和大臂转动连接的转动轴上设有随转动轴同步转动的支撑座,支撑座上安装有液压伸缩缸,液压伸缩缸的伸出端转动连接在小臂的端部,小臂的壁身和大臂的端部转动连接。
8.作为优选,所述小臂和大臂的转动轴到大臂的距离短于到方向转换臂的距离。根据杠杆原理,液压伸缩杆的小伸缩距离可以控制小臂另一端的大距离移动。
9.作为优选,所述方向转换臂包括和小臂转动连接的第一端以及和爪手结构转动连接的第二端,第一端包括相互平行的两块第一臂身,两块第一臂身通过转动轴和小臂转动连接,两块第一臂身之间固定连接有两块第二壁身,穿过两块第一臂身的转动轴垂直于穿过两块第二臂身的转动轴。方向转换臂可以实现垂直于小臂转动方向的转动,使得本实用
新型的爪手结构移动更加灵活。
10.作为优选,所述旋转盘、大臂、小臂、方向转换臂、爪手结构都有独立的液压驱动电机驱动。
11.作为优选,所述旋转盘和底座之间还设有配重块,使本实用新型的爪手结构在抓取重物时不容易失去平衡。
12.与现有技术相比,本实用新型具有以下有益效果:
13.大臂和小臂的转动方向固定为一个方向,爪手结构需要不同于大臂或小臂方向的位置转动的话就需要回转结构转动来带动,如果回转结构不方便转动,通过方向转换臂将小臂的转动方向转换为回转结构的转换方向,使得爪手结构在回转结构不转动的情况下也能部分实现回转结构转动才能实现的位置转动。
附图说明
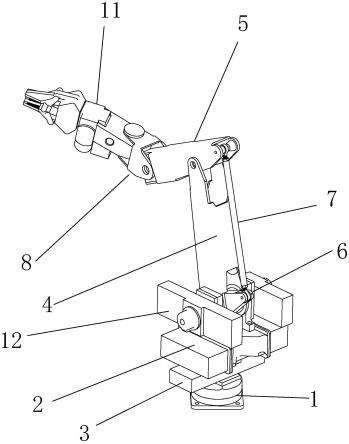
14.图1为本实用新型的结构示意图;
15.图2为方向转换臂的结构示意图。
16.图中标记:1、旋转盘;2、底座;3、配重块;4、大臂;5、小臂;6、支撑座;7、液压伸缩缸;8、方向转换臂;9、第一臂身;10、第二臂身;11、爪手结构;12、大臂安装座。
具体实施方式
17.下面结合附图所表示的实施例对本发明作进一步描述:
18.如图1、图2所示,一种多关节液压机械臂, 包括回转结构,所述回转结构回转结构包括旋转盘1,旋转盘1上依次设有配重块3和底座2,底座2上固定连接有大臂安装座12,大臂安装座12上通过转动轴转动连接有大臂4,大臂4的另一端转动连接有小臂5,大臂安装座12和大臂4转动连接的转动轴上设有随转动轴同步转动的支撑座6,支撑座6上安装有液压伸缩缸7,液压伸缩缸7的伸出端转动连接在小臂5的端部,小臂5的壁身和大臂4的端部转动连接。小臂5的另一端转动连接有方向转换臂8,方向转换臂8上转动连接有爪手结构11。
19.所述小臂5和大臂4的转动轴到大臂4的距离短于到方向转换臂8的距离。根据杠杆原理,液压伸缩杆的小伸缩距离可以控制小臂5另一端的大距离移动。
20.上述方向转换臂8包括和小臂5转动连接的第一端以及和爪手结构11转动连接的第二端,第一端包括相互平行的两块第一臂身9,两块第一臂身9通过转动轴和小臂5转动连接,两块第一臂身9之间固定连接有两块第二壁身,穿过两块第一臂身9的转动轴垂直于穿过两块第二臂身10的转动轴。方向转换臂8可以实现垂直于小臂5转动方向的转动,使得本实用新型的爪手结构11移动更加灵活。
21.上述旋转盘1、大臂4、小臂5、方向转换臂8、爪手结构11都有独立的液压驱动电机驱动。
22.使用过程中,大臂4和小臂5的转动方向固定为一个方向,爪手结构11需要不同于大臂4或小臂5方向的位置转动的话就需要回转结构转动来带动,如果回转结构不方便转动,通过以方向转换臂8的第二臂身10和爪手结构11转动连接的转动轴为旋转轴中心,使得爪手结构11在回转结构不转动的情况下也能部分实现回转结构转动才能实现的位置转动。
23.文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属
技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
技术特征:
1.一种多关节液压机械臂,包括回转结构,其特征在于,所述回转结构上转动连接有大臂(4),大臂(4)上转动连接有小臂(5),大臂(4)和小臂(5)都在为同一方向上转动,小臂(5)上转动连接有方向转换臂(8),方向转换臂(8)上转动连接有爪手结构(11)。2.根据权利要求1所述的多关节液压机械臂,其特征在于,所述回转结构包括旋转盘(1),旋转盘(1)上固定连接有底座(2),底座(2)上转动连接有大臂(4)。3.根据权利要求2所述的多关节液压机械臂,其特征在于,所述底座(2)上固定连接有大臂安装座(12),大臂安装座(12)上通过转动轴转动连接有大臂(4),大臂(4)的另一端转动连接有小臂(5),大臂安装座(12)和大臂(4)转动连接的转动轴上设有随转动轴同步转动的支撑座(6),支撑座(6)上安装有液压伸缩缸(7),液压伸缩缸(7)的伸出端转动连接在小臂(5)的端部,小臂(5)的壁身和大臂(4)的端部转动连接。4.根据权利要求3所述的多关节液压机械臂,其特征在于,所述小臂(5)和大臂(4)的转动轴到大臂(4)的距离短于到方向转换臂(8)的距离。5.根据权利要求1所述的多关节液压机械臂,其特征在于,所述方向转换臂(8)包括和小臂(5)转动连接的第一端以及和爪手结构(11)转动连接的第二端,第一端包括相互平行的两块第一臂身(9),两块第一臂身(9)通过转动轴和小臂(5)转动连接,两块第一臂身(9)之间固定连接有两块第二壁身,穿过两块第一臂身(9)的转动轴垂直于穿过两块第二臂身(10)的转动轴。6.根据权利要求2所述的多关节液压机械臂,其特征在于,所述旋转盘(1)、大臂(4)、小臂(5)、方向转换臂(8)、爪手结构(11)都有独立的液压驱动电机驱动。7.根据权利要求6所述的多关节液压机械臂,其特征在于,所述旋转盘(1)和底座(2)之间还设有配重块(3)。
技术总结
本实用新型针对现有技术中的多关节液压机械臂只有一个关节能够旋转移位,其他关节只能朝某个固定方向伸展/折叠的缺点,提出了一种多关节液压机械臂,属于液压机械臂技术领域,包括回转结构,所述回转结构上转动连接有大臂,大臂上转动连接有小臂,大臂和小臂都在为同一方向上转动,小臂上转动连接有方向转换臂,方向转换臂上转动连接有爪手结构。本实用新型的大臂和小臂转动方向固定为一个方向,爪手结构需要不同于大臂或小臂方向的位置转动的话就需要回转结构转动来带动,如果回转结构不方便转动,通过方向转换臂将小臂的转动方向转换为回转结构的转换方向,使得爪手结构在回转结构不转动的情况下也能部分实现回转结构转动才能实现的位置转动。转动才能实现的位置转动。转动才能实现的位置转动。
技术研发人员:张军六 宁忠荣 唐保国 姚劲松 宋宁宁 魏鑫 许明 彭孝荣 翟永庆 肖斌 郭晓程
受保护的技术使用者:国网山西省电力公司长治供电公司
技术研发日:2022.06.24
技术公布日:2022/12/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1