一种软体气动机器人手爪
本技术涉及一种软体气动机器人手爪。
背景技术:
1、现有的机器人抓手大多为金属硬质抓手,在抓取工件的过程中容易划伤工件表面,而且这些抓手都是机械驱动,结构相对复杂,零件多,成本高。对于一些材质较软,表面质量要求较高的工件,现有机器人抓手无法适用。
技术实现思路
1、为解决上述技术问题,本实用新型的目的是提供一种结构简单,能够防止划伤工件,保证工件表面质量,成本低的软体气动机器人手爪。
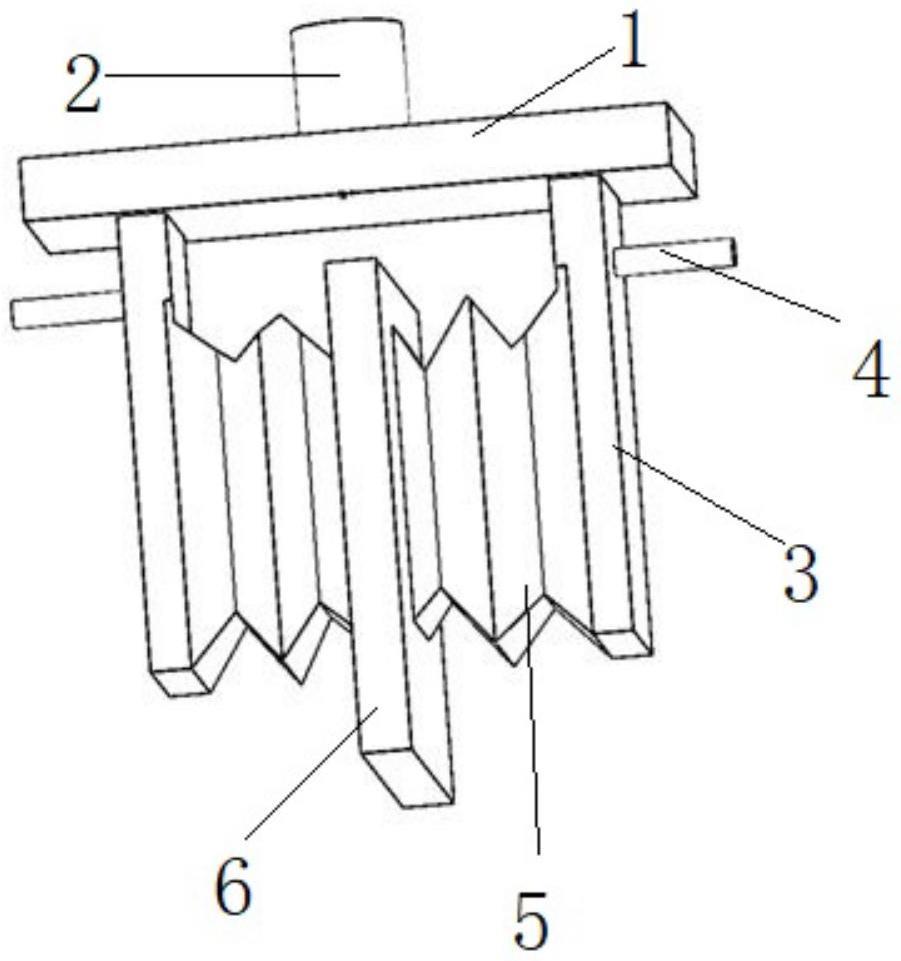
2、本实用新型提出的一种软体气动机器人手爪,其特征在于:包括基板、机械接头、支撑板、气管和软体抓手,所述机械接头安装在所述基板的上端,所述机械接头可拆卸安装到机器人的机械臂上,所述支撑板固定在所述基板的下端,所述气管和软体抓手分别固定在所述支撑板的两侧,所述支撑板和软体抓手的四周均呈封闭状,内部呈中空状,所述软体抓手和气管均与所述支撑板连通,所述软体抓手呈水平伸缩移动。
3、进一步的,所述机械接头安装在所述基板的上端中间。
4、进一步的,所述支撑板为两个且对称间隔分布在所述基板的下端两端部分。
5、进一步的,所述软体抓手为两个且呈并排对称设置,所述软体抓手的后端密封连接在所述支撑板上,所述软体抓手的前端呈扁平状。
6、进一步的,所述软体抓手呈伸缩式波纹管状,所述软体抓手由硅胶或橡胶一体成型。
7、进一步的,所述气管位于所述支撑板的侧壁上端部分。
8、由上述方案,本实用新型至少具有以下优点:该软体气动机器人手爪结构简单,成本低。能够防止划伤工件,保证工件表面质量。适用于材质较软,表面质量要求较高的工件。
9、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
技术特征:
1.一种软体气动机器人手爪,其特征在于:包括基板、机械接头、支撑板、气管和软体抓手,所述机械接头安装在所述基板的上端,所述机械接头可拆卸安装到机器人的机械臂上,所述支撑板固定在所述基板的下端,所述气管和软体抓手分别固定在所述支撑板的两侧,所述支撑板和软体抓手的四周均呈封闭状,内部呈中空状,所述软体抓手和气管均与所述支撑板连通,所述软体抓手呈水平伸缩移动;
技术总结
本技术公开了一种软体气动机器人手爪,包括基板、机械接头、支撑板、气管和软体抓手,所述机械接头安装在所述基板的上端,所述机械接头可拆卸安装到机器人的机械臂上,所述支撑板固定在所述基板的下端,所述气管和软体抓手分别固定在所述支撑板的两侧,所述支撑板和软体抓手的四周均呈封闭状,内部呈中空状,所述软体抓手和气管均与所述支撑板连通,所述软体抓手呈水平伸缩移动,该软体气动机器人手爪结构简单,能够防止划伤工件,保证工件表面质量,成本低。
技术研发人员:胡增荣,王晓南,刘鑫培,张庆宇,孙茜,沈鑫珺,刘珍光
受保护的技术使用者:苏州大学
技术研发日:20220701
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!