一种粮食取样机器人的制作方法
1.本实用新型涉及粮食取样技术领域,具体是指一种粮食取样机器人。
背景技术:
2.粮库,存放粮食的建筑物。因为我国是农业大国,因此在全国各地都设有粮仓。随着我国农业的进一步发展,农业生产形成了一定的规模,粮食出现了剩余,因此逐渐由粮食加工发展到粮食储存。在粮仓中储存的粮食中,需要常常从其中取出一些样品并检测其中害虫的含量以及各种指标的监控,从而达到实时监控的技术效果。当前广泛运用的取样装置需要人员移动不同的地点多次进行取样,以达到所需要的取样量,取样人员的工作量较大,取样的效率较低。
技术实现要素:
3.本实用新型要解决的技术问题是克服以上技术困难,提供一种能移动到多点进行取样的粮食取样机器人。
4.为解决上述技术问题,本实用新型提供的技术方案为:一种粮食取样机器人,包括机械式无杆气缸,所述机械式无杆气缸的外部滑块固定连接电动伸缩杆,所述电动伸缩杆的活塞杆底部固定连接电机固定盒,所述电机固定盒中固定连接取样电机,所述取样电机的输出轴固定连接蛟龙输送杆,所述蛟龙输送杆上固定有螺旋输送叶片,所述蛟龙输送杆底部转动连接固定连接电机固定盒的输送管,所述输送管下部两侧均设有一个取样口,所述输送管的出料口伸入取样盒中,所述取样盒固定在输送管外侧。
5.优选的,所述取样盒上设有刻度条,方便观察取样量。
6.优选的,所述机械式无杆气缸固定在横梁或吊顶上,将机械式无杆气缸固定住。
7.优选的,所述电动伸缩杆上部为控制器,能够控制电动伸缩杆工作。
8.优选的,所述控制器中设有无线接收器,能无线控制。
9.本实用新型与现有技术相比的优点在于:本实用新型顶部为机械式无杆气缸,机械式无杆气缸本身不移动,机械式无杆气缸中的活塞与外部滑块连接在一起,带动固定在外部滑块上的执行机构实现左右运动,带动取样机构多点取样,取得的粮食样本均在取样盒中,方便进行大面积的快速检测。
附图说明
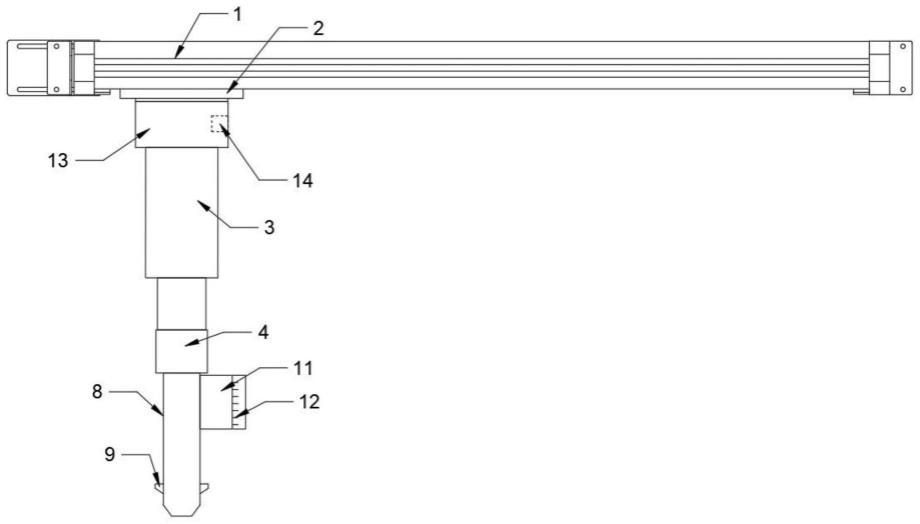
10.图1是本实用新型的结构示意图。
11.图2是本实用新型输送管内部示意图。
12.如图所示:1、机械式无杆气缸;2、外部滑块;3、电动伸缩杆;4、电机固定盒;5、取样电机;6、蛟龙输送杆;7、螺旋输送叶片;8、输送管;9、取样口;10、出料口;11、取样盒;12、刻度条;13、控制器;14、无线接收器。
具体实施方式
13.下面结合附图对本实用新型做进一步的详细说明。参照图1-2,一种粮食取样机器人,包括机械式无杆气缸1,所述机械式无杆气缸1固定在横梁或吊顶上,机械式无杆气缸1本身不移动,机械式无杆气缸1中的活塞与外部滑块2连接在一起,带动固定在外部滑块2上的执行机构实现左右运动,所述机械式无杆气缸1的外部滑块2固定连接电动伸缩杆3,所述电动伸缩杆3上部为控制器13。所述控制器13中设有无线接收器14,能够无线控制,所述电动伸缩杆3的活塞杆底部固定连接电机固定盒4,所述电机固定盒4中固定连接取样电机5,所述电机固定盒4底部设有与取样电机5输出轴相配的开口,所述取样电机5的输出轴固定连接蛟龙输送杆6,所述蛟龙输送杆6上固定有螺旋输送叶片7,所述蛟龙输送杆6底部转动连接固定连接电机固定盒4的输送管8,所述输送管8下部两侧均设有一个取样口9,粮食由取样口进入输送管8中,落在螺旋输送叶片7上,螺旋输送叶片7转动,将取得的粮食样本运到出料口10处,所述输送管8的出料口10伸入取样盒11中,粮食样本落入取样盒11中,取样盒11由透明材质制成,所述取样盒11上设有刻度条12,方便观察取样量。所述取样盒11固定在输送管8外侧。
14.本实用新型的工作原理,机械式无杆气缸1工作,外部滑块2移动,外部滑块2下部连接的部件随其移动到需要进行取样的位置,控制器13控制电动伸缩杆3的活塞向下,使输送管8插入粮食中,粮食由取样口9进入输送管8中,落在螺旋输送叶片7上,螺旋输送叶片7转动,将取得的粮食样本运到出料口10处,所述输送管8的出料口10伸入取样盒11中,粮食样本落入取样盒11中。
15.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
技术特征:
1.一种粮食取样机器人,其特征在于:包括机械式无杆气缸(1),所述机械式无杆气缸(1)的外部滑块(2)固定连接电动伸缩杆(3),所述电动伸缩杆(3)的活塞杆底部固定连接电机固定盒(4),所述电机固定盒(4)中固定连接取样电机(5),所述取样电机(5)的输出轴固定连接蛟龙输送杆(6),所述蛟龙输送杆(6)上固定有螺旋输送叶片(7),所述蛟龙输送杆(6)底部转动连接固定连接电机固定盒(4)的输送管(8),所述输送管(8)下部两侧均设有一个取样口(9),所述输送管(8)的出料口(10)伸入取样盒(11)中,所述取样盒(11)固定在输送管(8)外侧。2.根据权利要求1所述的一种粮食取样机器人,其特征在于:所述取样盒(11)上设有刻度条(12)。3.根据权利要求1所述的一种粮食取样机器人,其特征在于:所述机械式无杆气缸(1)固定在横梁或吊顶上。4.根据权利要求1所述的一种粮食取样机器人,其特征在于:所述电动伸缩杆(3)上部为控制器(13)。5.根据权利要求4所述的一种粮食取样机器人,其特征在于:所述控制器(13)中设有无线接收器(14)。
技术总结
本实用新型公开了一种粮食取样机器人,包括机械式无杆气缸,所述机械式无杆气缸的外部滑块固定连接电动伸缩杆,所述电动伸缩杆的活塞杆底部固定连接电机固定盒,所述电机固定盒中固定连接取样电机,所述取样电机的输出轴固定连接蛟龙输送杆,所述蛟龙输送杆上固定有螺旋输送叶片,所述蛟龙输送杆底部转动连接固定连接电机固定盒的输送管,所述输送管下部两侧均设有一个取样口,所述输送管的出料口伸入取样盒中,所述取样盒固定在输送管外侧。与现有技术相比的优点在于:本实用新型顶部为机械式无杆气缸,机械式无杆气缸本身不移动,固定在外部滑块上的执行机构左右运动,带动取样机构多点取样。多点取样。多点取样。
技术研发人员:周昊 吴岳 吴昊
受保护的技术使用者:北京巨森科技发展有限公司
技术研发日:2022.07.18
技术公布日:2023/1/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1