一种实验室用机械臂控制的剪绳机构的制作方法
本技术涉及剪绳机构,具体为一种实验室用机械臂控制的剪绳机构。
背景技术:
1、目前对食品、化妆品等进行微生物检测中,需要对其中某种特定的细菌(例如大肠杆菌)进行检测,而这种特定的细菌通常是和其他菌混合在一起。因此,检测之前首先需要将该种细菌从混合菌中分离出来,需要用到柔性线绳进行划分,划分结束后需要对柔性线绳前端进行剪切。
2、但现有剪切需要人工进行,不能够进行按照设定的轨迹进行动作剪切,剪切效率低,因此,针对上述问题提出一种实验室用机械臂控制的剪绳机构。
技术实现思路
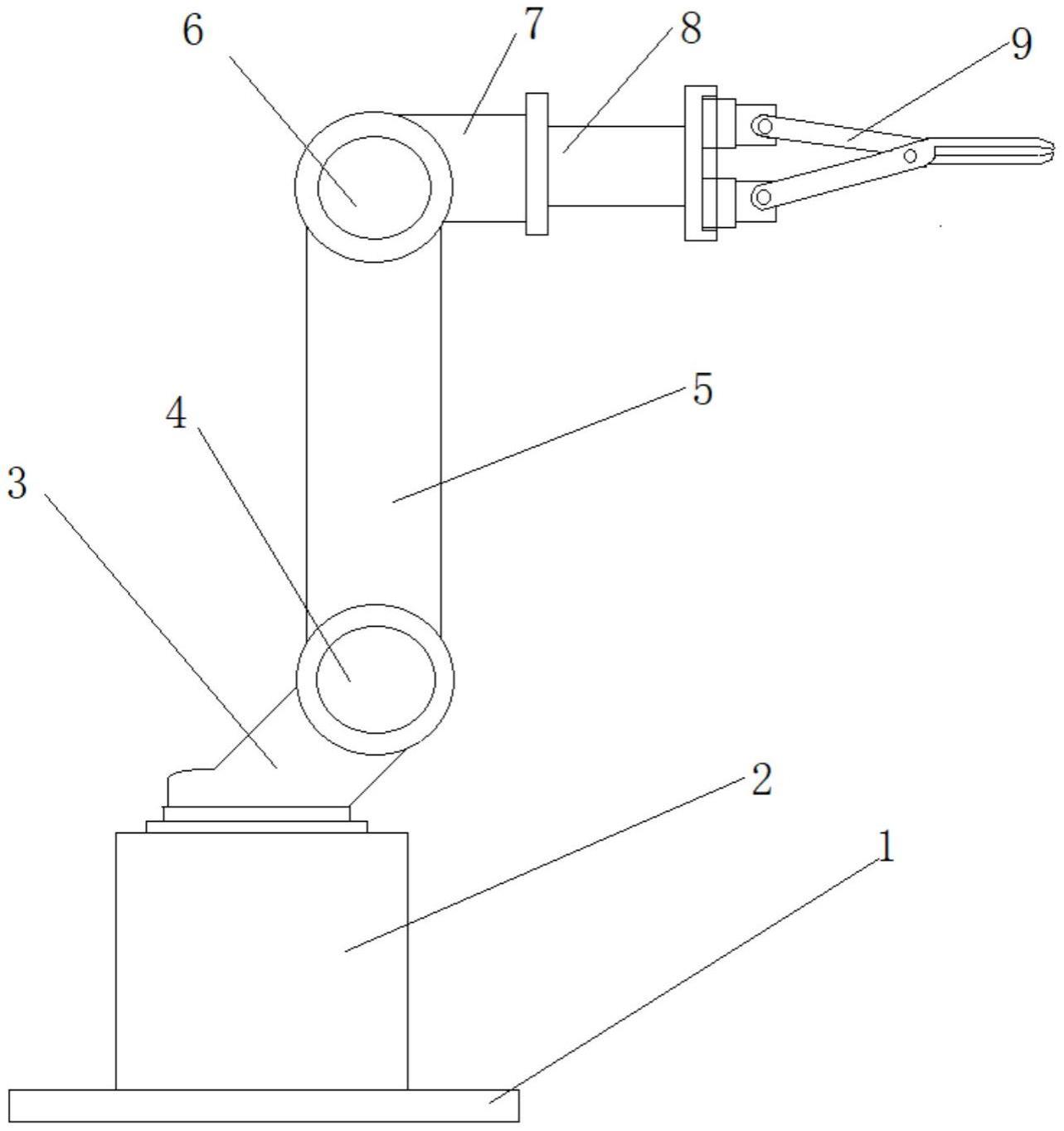
1、本实用新型的目的在于提供一种实验室用机械臂控制的剪绳机构,包括底座、机械臂结构和剪切结构三部分,所述机械臂结构包括驱动电机、固定臂、第一舵机、活动臂一、第二舵机、活动臂二、连接块,所述底座上方设置有驱动电机,所述驱动电机上方输出端设置有固定臂,所述固定臂上方与活动臂一活动连接,且固定臂和活动臂一连接处设置有第一舵机,所述活动臂一上方与活动臂二活动连接,且活动臂一和活动臂二连接处设置有第二舵机,所述活动臂二前端设置有连接块,所述连接块远离活动臂二的一侧设置有剪切结构。
2、进一步的,所述剪切结构包括安装块,所述安装块一侧内部开设有滑动槽,所述滑动槽内部分别设置有电动滑块一和电动滑块二,所述电动滑块一、电动滑块二远离滑动槽的一侧分别与l形连接板一和l形连接板二连接,所述l形连接板一和l形连接板二上分别通过定位螺栓与剪刀臂一、剪刀臂二连接,所述剪刀臂一、剪刀臂二前端通过转动轴转动连接,所述剪刀臂一、剪刀臂二的前端分别设置有剪切端一、剪切端二。
3、进一步的,所述电动滑块一远离滑动槽的一侧与l形连接板一连接,所述电动滑块二远离滑动槽的一侧与l形连接板二连接。
4、进一步的,所述l形连接板一通过定位螺栓与剪刀臂一连接,所述l形连接板二通过定位螺栓与剪刀臂二连接。
5、进一步的,所述剪刀臂一的前端设置有剪切端一,所述剪刀臂二的前端设置有剪切端二。
6、与现有技术相比,本实用新型的有益效果如下:
7、1、本实用新型设置有驱动电机、固定臂、第一舵机、活动臂一、第二舵机、活动臂二、连接块,通过驱动电机带动固定臂转动,转动到靠近绳子的位置后通过第一舵机运作,带动活动臂一转动,再通过第二舵机运作,带动活动臂二转动,能够便于控制机械臂达到绳子在的位置,方便进行剪切操作。
8、2、本实用新型设置有安装块、滑动槽、电动滑块一、电动滑块二、剪刀臂一、剪刀臂二、剪切端一、剪切端二,通过启动电动滑块一和电动滑块二靠近,能够带动剪刀臂一和剪刀臂二靠近,进而剪切端一和剪切端二靠近,对绳子进行自动剪切。
9、3、本实用新型设置有l形连接板一、l形连接板二、定位螺栓,通过定位螺栓分别将剪刀臂一和剪刀臂二一端固定在l形连接板一、l形连接板二上,便于对剪刀进行安装和拆卸,进而便于对剪刀进行更换。
技术特征:
1.一种实验室用机械臂控制的剪绳机构,包括底座(1)、机械臂结构和剪切结构(9)三部分,其特征在于:所述机械臂结构包括驱动电机(2)、固定臂(3)、第一舵机(4)、活动臂一(5)、第二舵机(6)、活动臂二(7)、连接块(8),所述底座(1)上方设置有驱动电机(2),所述驱动电机(2)上方输出端设置有固定臂(3),所述固定臂(3)上方与活动臂一(5)活动连接,且固定臂(3)和活动臂一(5)连接处设置有第一舵机(4),所述活动臂一(5)上方与活动臂二(7)活动连接,且活动臂一(5)和活动臂二(7)连接处设置有第二舵机(6),所述活动臂二(7)前端设置有连接块(8),所述连接块(8)远离活动臂二(7)的一侧设置有剪切结构(9)。
2.根据权利要求1所述的一种实验室用机械臂控制的剪绳机构,其特征在于:所述剪切结构(9)包括安装块(91),所述安装块(91)一侧内部开设有滑动槽(92),所述滑动槽(92)内部分别设置有电动滑块一(93)和电动滑块二(94),所述电动滑块一(93)、电动滑块二(94)远离滑动槽(92)的一侧分别与l形连接板一(95)和l形连接板二(96)连接,所述l形连接板一(95)和l形连接板二(96)上分别通过定位螺栓(97)与剪刀臂一(98)、剪刀臂二(99)连接,所述剪刀臂一(98)、剪刀臂二(99)前端通过转动轴(912)转动连接,所述剪刀臂一(98)、剪刀臂二(99)的前端分别设置有剪切端一(910)、剪切端二(911)。
3.根据权利要求2所述的一种实验室用机械臂控制的剪绳机构,其特征在于:所述电动滑块一(93)远离滑动槽(92)的一侧与l形连接板一(95)连接,所述电动滑块二(94)远离滑动槽(92)的一侧与l形连接板二(96)连接。
4.根据权利要求3所述的一种实验室用机械臂控制的剪绳机构,其特征在于:所述l形连接板一(95)通过定位螺栓(97)与剪刀臂一(98)连接,所述l形连接板二(96)通过定位螺栓(97)与剪刀臂二(99)连接。
5.根据权利要求4所述的一种实验室用机械臂控制的剪绳机构,其特征在于:所述剪刀臂一(98)的前端设置有剪切端一(910),所述剪刀臂二(99)的前端设置有剪切端二(911)。
技术总结
本技术公开了一种实验室用机械臂控制的剪绳机构,包括底座、机械臂结构和剪切结构三部分,所述机械臂结构包括驱动电机、固定臂、第一舵机、活动臂一、第二舵机、活动臂二、连接块,所述底座上方设置有驱动电机,所述驱动电机上方输出端设置有固定臂,所述固定臂上方与活动臂一活动连接,且固定臂和活动臂一连接处设置有第一舵机,所述活动臂一上方与活动臂二活动连接,且活动臂一和活动臂二连接处设置有第二舵机,所述活动臂二前端设置有连接块,所述连接块远离活动臂二的一侧设置有剪切结构。本技术能够便于对绳子进行剪切。
技术研发人员:刘祥,焦丽琴,朱险峰,庞泉,庞兴荣,岳明祥,刘自国
受保护的技术使用者:天津市食品安全检测技术研究院
技术研发日:20220725
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!