收板夹具总成及收板机桁架机械手的制作方法
1.本实用新型属于电池制造领域,具体涉及一种收板夹具及机械手。
背景技术:
2.石油资源的日益减少、大气环境的污染严重,电动车因节能环保,受到消费者的青睐,市场需求量大。铅酸电池作为成熟的产品,且产品性能较为稳定,因此其是安全性最高的电池产品。
3.在电池生产中,极板包括板栅和涂覆在板栅上的铅膏,板栅的制备方法可以使用连铸连轧法制备,极板叠片后为极板组,极板组呈阵列摆放于固化架上,然后进入固化室进行固化。
4.面对电池订单量日益增大,如何提高极片叠片后转运效率,对电池生产效率的提高起到重要的作用。
技术实现要素:
5.本实用新型的目的是克服现有技术的上述不足,而提供一种收板夹具总成,通过两个同步钩爪,同时抓料,提高工作效率。
6.本实用新型的另一目的是提供一种收板机桁架机械手。
7.本实用新型的技术方案是:包括钩爪基板,收板伺服电机,装于钩爪基板下部的两钩爪、用于带动两钩爪同步位移的同步传动机构;两钩爪经滑块滑动装于钩爪基板底面的滑轨处,同步传动机构包括主动轮、同步带、两从动轮、张紧轮一、张紧轮二,主动轮与收板伺服电机的电机轴连接,同步带一端绕装于一从动轮上,同步带另一端绕装于另一从动轮上,同步带中部绕装于主动轮上,主动轮左右两侧的同步带经张紧轮一、张紧轮二张紧;
8.从动轮与张紧轮一之间、从动轮与张紧轮二之间均有两段同步带段,两段同步带段为同步带段上、同步带段下,一钩爪固定于同步带段上处,另一钩爪固定于同步带段下处。
9.两钩爪沿两从动轮中心连线的中点呈旋转对称。
10.两张紧轮经张紧轮座对称装于钩爪基板下部。
11.所述钩爪基板为长方体薄板,沿钩爪基板长度方向延伸的滑轨为两条,两滑轨对称设置于钩爪基板底面前后两侧。
12.一钩爪固定于一钩爪安装板下面,钩爪安装板连接滑块下部的滑块安装板;所述钩爪包括两匚形结构钩爪板,各钩爪的两钩爪板与钩爪安装板固定,钩爪安装板前后两侧经两滑块安装板装于滑块下部。
13.所述钩爪板包括两横杆、连于两横杆尾部的竖杆,位于上端的横杆与钩爪安装板固定,位于下端的横杆头部倒圆角。
14.一种收板机桁架机械手,包括支撑框架,装于支撑框架上的x轴行走梁,y轴行走梁,z轴行走柱,可沿x轴行走梁、y轴行走梁、z轴行走柱自由位移的机械手,机械手端部装如
上任一所述的收板夹具总成。
15.本实用新型收板夹具总成设有两个钩爪,两钩爪可同时取放两组料,与一个钩爪相比,大大提高了转运效率。本实用新型收板夹具总成通过收板伺服电机正反转带动两钩爪的同步位移至合适间距,收板夹具总成的两钩爪在取料后转运至固化架时的放料位置灵活可调,调整方便、精确。
16.间距调整至合适间距,具体为:收板伺服电机转动带动主动轮转动,主动轮通过同步带带动两从动轮转动实现固定于同步带上的两钩爪同步位移。
17.本实用新型收板机桁架机械手用于电池生产可提高生产效率,减少人力、降低操作员的工作强度。
附图说明
18.图1是本实用新型收板夹具总成的结构示意图;
19.图2是图1的主视图;
20.图3是图1的仰视图;
21.图4是图3的局部示意图;
22.图5是本实用新型机械手的使用状态图。
具体实施方式
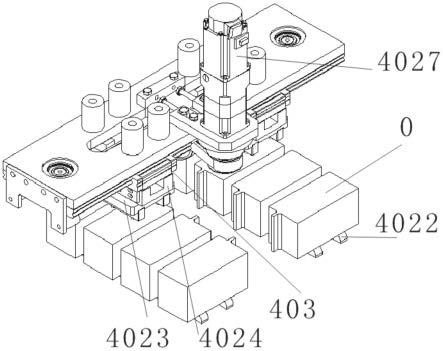
23.图1-4中,收板夹具总成的钩爪基板下部装两钩爪4020,钩爪4020由两匚形结构钩爪板组成,每个钩爪板包括两横杆、连于两横杆尾部的竖杆,上端横杆与钩爪安装板4023固定,下端横杆头部倒圆角4022。两钩爪4020装于钩爪安装板4023,钩爪安装板4023连接滑块安装板4024经滑块403滑动装于钩爪基板401底面的滑轨处,同步传动机构包括主动轮4013、同步带4012、两从动轮4015、张紧轮一409、张紧轮二4010,主动轮4013与收板伺服电机4027的电机轴连接,同步带一端绕装于一从动轮4015上,同步带4012另一端绕装于另一从动轮上,同步带4012中部绕装于主动轮4013上,主动轮4013左右两侧的同步带经张紧轮一409、张紧轮二4010张紧。一钩爪固定于一从动轮4015与张紧轮一409之间的一段同步带段上处,另一钩爪固定于另一从动轮与张紧轮二4010之间的一段同步带段下处。两钩爪沿两从动轮4015中心连线的中点呈旋转对称。
24.钩爪4020由两匚形结构钩爪板组成,每个钩爪板包括两横杆、连于两横杆尾部的竖杆,上端横杆与钩爪安装板4023固定,下端横杆头部倒圆角4022。四个极板组依次排列于钩爪横杆上。两个钩爪一次可取放八组极板组。
25.使用时,可通过收板伺服电机4027正反转带动两钩爪的间距调整至合适间距,具体为:收板伺服电机4027转动带动主动轮4013转动,主动轮4013通过同步带4012带动两从动轮4015转动实现固定于同步带上的两钩爪同步位移。
26.图5中,支撑框架4上装x轴行走梁、y轴行走梁、z轴行走柱,z轴行走柱端部装收板夹具总成,收板夹具总成的两钩爪调整好间距后,通过调整收板夹具在x轴行走梁、y轴行走梁、z轴行走柱上位置,将极板装载输送系统5上的极板0自动收取转运。
技术特征:
1.一种收板夹具总成,其特征在于:包括钩爪基板(401),收板伺服电机(4027),装于钩爪基板下部的两钩爪(4020)、用于带动两钩爪同步位移的同步传动机构;两钩爪(4020)经滑块(403)滑动装于钩爪基板(401)底面的滑轨处,同步传动机构包括主动轮(4013)、同步带(4012)、两从动轮(4015)、张紧轮一(409)、张紧轮二(4010),主动轮(4013)与收板伺服电机(4027)的电机轴连接,同步带一端绕装于一从动轮(4015)上,同步带(4012)另一端绕装于另一从动轮上,同步带(4012)中部绕装于主动轮(4013)上,主动轮(4013)左右两侧的同步带经张紧轮一(409)、张紧轮二(4010)张紧;从动轮(4015)与张紧轮一(409)之间、从动轮(4015)与张紧轮二(4010)之间均有两段同步带段,两段同步带段为同步带段上、同步带段下,一钩爪固定于同步带段上处,另一钩爪固定于同步带段下处。2.根据权利要求1所述的收板夹具总成,其特征在于:两钩爪沿两从动轮(4015)中心连线的中点呈旋转对称。3.根据权利要求1所述的收板夹具总成,其特征在于:两张紧轮经张紧轮座(408)对称装于钩爪基板(401)下部。4.根据权利要求1所述的收板夹具总成,其特征在于:所述钩爪基板(401)为长方体薄板,沿钩爪基板(401)长度方向延伸的滑轨(404)为两条,两滑轨(404)对称设置于钩爪基板(401)底面前后两侧。5.根据权利要求1所述的收板夹具总成,其特征在于:一钩爪(4020)固定于一钩爪安装板(4023)下面,钩爪安装板(4023)连接滑块(403)下部的滑块安装板(4024);所述钩爪(4020)包括两钩爪板,各钩爪的两钩爪板与钩爪安装板(4023)固定,钩爪安装板(4023)前后两侧经两滑块安装板(4024)装于滑块(403)下部。6.根据权利要求5所述的收板夹具总成,其特征在于:所述钩爪板包括两横杆、连于两横杆尾部的竖杆,位于上端的横杆与钩爪安装板(4023)固定,位于下端的横杆头部倒圆角(4022)。7.一种收板机桁架机械手,其特征在于:包括支撑框架,装于支撑框架上的x轴行走梁,y轴行走梁,z轴行走柱,可沿x轴行走梁、y轴行走梁、z轴行走柱自由位移的机械手,机械手端部装如权利要求1-6任一所述的收板夹具总成。
技术总结
一种收板夹具总成及收板机桁架机械手,该收板夹具总成包括钩爪基板,收板伺服电机,装于钩爪基板下部的两钩爪、用于带动两钩爪同步位移的同步传动机构;两钩爪经滑块滑动装于钩爪基板底面的滑轨处,同步传动机构包括主动轮、同步带、两从动轮、张紧轮一、张紧轮二,主动轮与收板伺服电机的电机轴连接,同步带一端绕装于一从动轮上,同步带另一端绕装于另一从动轮上,同步带中部绕装于主动轮上,主动轮左右两侧的同步带经张紧轮一、张紧轮二张紧。本实用新型通过两个同步钩爪,同时抓料,提高工作效率。效率。效率。
技术研发人员:李延斌 王敬云 吴凯
受保护的技术使用者:襄阳新兴联机械有限公司
技术研发日:2022.07.27
技术公布日:2022/11/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1