一种吸附稳定的多吸盘机械手的制作方法
1.本实用新型属于负压吸盘技术领域,特别涉及一种吸附稳定的多吸盘机械手。
背景技术:
2.工业用多吸盘机械手,在工作运行中存在一个普遍的问题,如果其中一个吸盘或多个吸盘吸不住货物时,则其它吸盘上的货物也均会掉落(原因在于这些吸盘均与同一个真空泵连接,如果其中有吸盘吸不住货物,则产生漏气,其它吸盘也不会形成稳定的负压),需要重新吸附,影响使用,且容易产生安全事故,尤其在吸包装袋时,这种情况尤为明显。
技术实现要素:
3.本实用新型提供一种吸附稳定的多吸盘机械手,可以解决背景技术中所指出的问题。
4.一种吸附稳定的多吸盘机械手,包括多个负压吸盘本体,每个负压吸盘本体均分别对应连接单独的支气管,所述负压吸盘本体内设有位置传感器,所述位置传感器与控制系统电性连接,每条单独的支气管上均设有电动控制阀,所述电动控制阀通过控制系统控制。
5.优选的,所述位置传感器为电容传感器或光电开关。
6.优选的,所述电动控制阀为真空电磁阀。
7.优选的,所述负压吸盘本体包括吸盘基体以及柔性吸碗,所述柔性吸碗内侧一端具有向外延伸的连接部以及向内延伸的柔性延伸部,所述连接部以及柔性延伸部之间形成连接槽,所述吸盘基体下端连接在所述连接槽内。
8.优选的,所述吸盘基体内通过弹性缓冲件连接保护分隔件。
9.优选的,所述弹性缓冲件为缓冲弹簧,其上端固定在所述吸盘基体的顶端,其下端连接保护分隔件,所述保护分隔件为隔板。
10.有益效果:本实用新型提供一种吸附稳定的多吸盘机械手,如有吸盘吸不住货物时,其它吸住货物的吸盘不受影响,可正常工作,不会影响正常运行,不会产生安全隐患。
附图说明
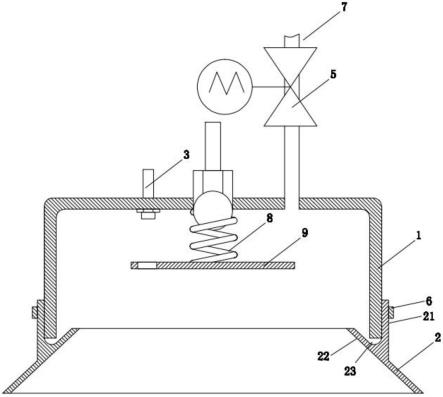
11.图1为本实用新型吸盘本体的结构示意图,
12.图2为本实用新型逻辑控制图,
13.附图标记说明:
14.图中标号:吸盘基体1;柔性吸碗2;连接部21;柔性延伸部22;连接槽23;位置传感器3;控制系统4;电动控制阀5;管卡6;支气管7;弹性缓冲件8;保护分隔件9。
具体实施方式
15.下面结合附图,对本实用新型的一个具体实施方式进行详细描述,但应当理解本
实用新型的保护范围并不受具体实施方式的限制。
16.实施例1:
17.如图1-2所示,一种吸附稳定的多吸盘机械手,包括多个负压吸盘本体,每个负压吸盘本体均分别对应连接单独的支气管7,负压吸盘本体内设有位置传感器3,位置传感器3宜选用电容传感器,电容传感器对物料没有选择,任何物料都可以感应,适应面广,也可以为光电开关,具体的,其可安装在吸盘基体1内,固定在其顶部,位置传感器3与控制系统4电性连接,控制系统4可以基于plc或单片机,每条单独的支气管7上均设有电动控制阀5,电动控制阀5通过控制系统4控制,电动控制阀5可选用真空电磁阀。
18.负压吸盘本体包括吸盘基体1以及柔性吸碗2,柔性吸碗2内侧一端具有向外延伸的连接部21以及向内延伸的柔性延伸部22,连接部21以及柔性延伸部22之间形成连接槽23,吸盘基体1下端连接在连接槽23内,连接部21内侧可通过胶水粘结在吸盘基体1上,或外侧在设有管卡6连接在吸盘基体1上,以保证两者的密封性,通过此结构,可提高负压吸盘本体的密封性,使其具有稳定的吸附能力,特别是在吸包装袋等类似货物时,效果非常明显,当负压吸盘本体吸包装袋时,包装袋的吸附区域会向上凸起,并将柔性延伸部22压制在吸盘基体1上,凸起区域上的褶皱与柔性延伸部22接触,柔性延伸部22产生形变与褶皱贴合,从而提高密封性,避免漏气。
19.吸盘基体1内通过弹性缓冲件8连接保护分隔件9,弹性缓冲件8为缓冲弹簧,其上端固定在所述吸盘基体1的顶端,其下端连接保护分隔件9,保护分隔件9为隔板,隔板与位置传感器3对应位置设有通孔,使其不影响位置传感器3的正常工作,通过保护分隔件9可防止作业时,包装袋此区域过度隆起,包装袋被吸破,避免发生不必要的事故。
20.本实用新型的工作原理:当某一个负压吸盘本体吸不住货物时,货物会掉落或产生位置变化,这时位置传感器3感应到距离的变化,将信号传递给控制系统4,控制系统4控制对应支气管7上的电动控制阀5关闭,即将对应支气管7封闭,使其密封,从而不影响其它负压吸盘本体正常工作。
21.以上公开的仅为本实用新型的几个具体实施例,但是,本实用新型实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本实用新型的保护范围。
技术特征:
1.一种吸附稳定的多吸盘机械手,包括多个负压吸盘本体,每个负压吸盘本体均分别对应连接单独的支气管(7),其特征在于:所述负压吸盘本体内设有位置传感器(3),所述位置传感器(3)与控制系统(4)电性连接,每条单独的支气管(7)上均设有电动控制阀(5),所述电动控制阀(5)通过控制系统(4)控制。2.根据权利要求1所述的一种吸附稳定的多吸盘机械手,其特征在于:所述位置传感器(3)为电容传感器或光电开关。3.根据权利要求1所述的一种吸附稳定的多吸盘机械手,其特征在于:所述电动控制阀(5)为真空电磁阀。4.根据权利要求1-3任意一项所述的一种吸附稳定的多吸盘机械手,其特征在于:所述负压吸盘本体包括吸盘基体(1)以及柔性吸碗(2),所述柔性吸碗(2)内侧一端具有向外延伸的连接部(21)以及向内延伸的柔性延伸部(22),所述连接部(21)以及柔性延伸部(22)之间形成连接槽(23),所述吸盘基体(1)下端连接在所述连接槽(23)内。5.根据权利要求4所述的一种吸附稳定的多吸盘机械手,其特征在于:所述吸盘基体(1)内通过弹性缓冲件(8)连接保护分隔件(9)。6.根据权利要求5所述的一种吸附稳定的多吸盘机械手,其特征在于:所述弹性缓冲件(8)为缓冲弹簧,其上端固定在所述吸盘基体(1)的顶端,其下端连接保护分隔件(9),所述保护分隔件(9)为隔板。
技术总结
本实用新型属于负压吸盘技术领域,特别涉及一种吸附稳定的多吸盘机械手,包括多个负压吸盘本体,每个负压吸盘本体均分别对应连接单独的支气管,所述负压吸盘本体内设有位置传感器,所述位置传感器与控制系统电性连接,每条单独的支气管上均设有电动控制阀,所述电动控制阀通过控制系统控制,本实用新型提供一种吸附稳定的多吸盘机械手,如有吸盘吸不住货物时,其它吸住货物的吸盘不受影响,可正常工作,不会影响正常运行,不会产生安全隐患。不会产生安全隐患。不会产生安全隐患。
技术研发人员:樊东生 黄凯 高振钢
受保护的技术使用者:德州支点机械科技有限公司
技术研发日:2022.08.31
技术公布日:2023/3/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1