一种轻型化下肢助力外骨骼机器人
本技术涉及外骨骼机器人,尤其涉及一种轻型化下肢助力外骨骼机器人。
背景技术:
1、外骨骼机器人技术是融合传感、控制、信息、融合、移动计算,为作为操作者的人提供一种可穿戴的机械机构的综合技术。本文简要介绍了军事领域外骨骼世界机器人技术的发展现状与趋势。是指套在人体外面的机器人,也称“可穿戴的机器人”。
2、现有的外骨骼腿部机构多数设计为简单的一体式刚性结构,对适应腿部的长度上只是简单地通过螺钉等固定连接方式进行连接,这种连接方式在不同身高的人群使用时需要对外骨骼进行拆卸,再重新适配不同身高的腿部长度,在使用上存在适应性较差调节不便的问题。
技术实现思路
1、本实用新型的目的是为了解决背景技术中适应性较差,不便于根据使用者身高腿长来进行调节的问题,而提出的一种轻型化下肢助力外骨骼机器人。
2、为了实现上述目的,本实用新型采用了如下技术方案:
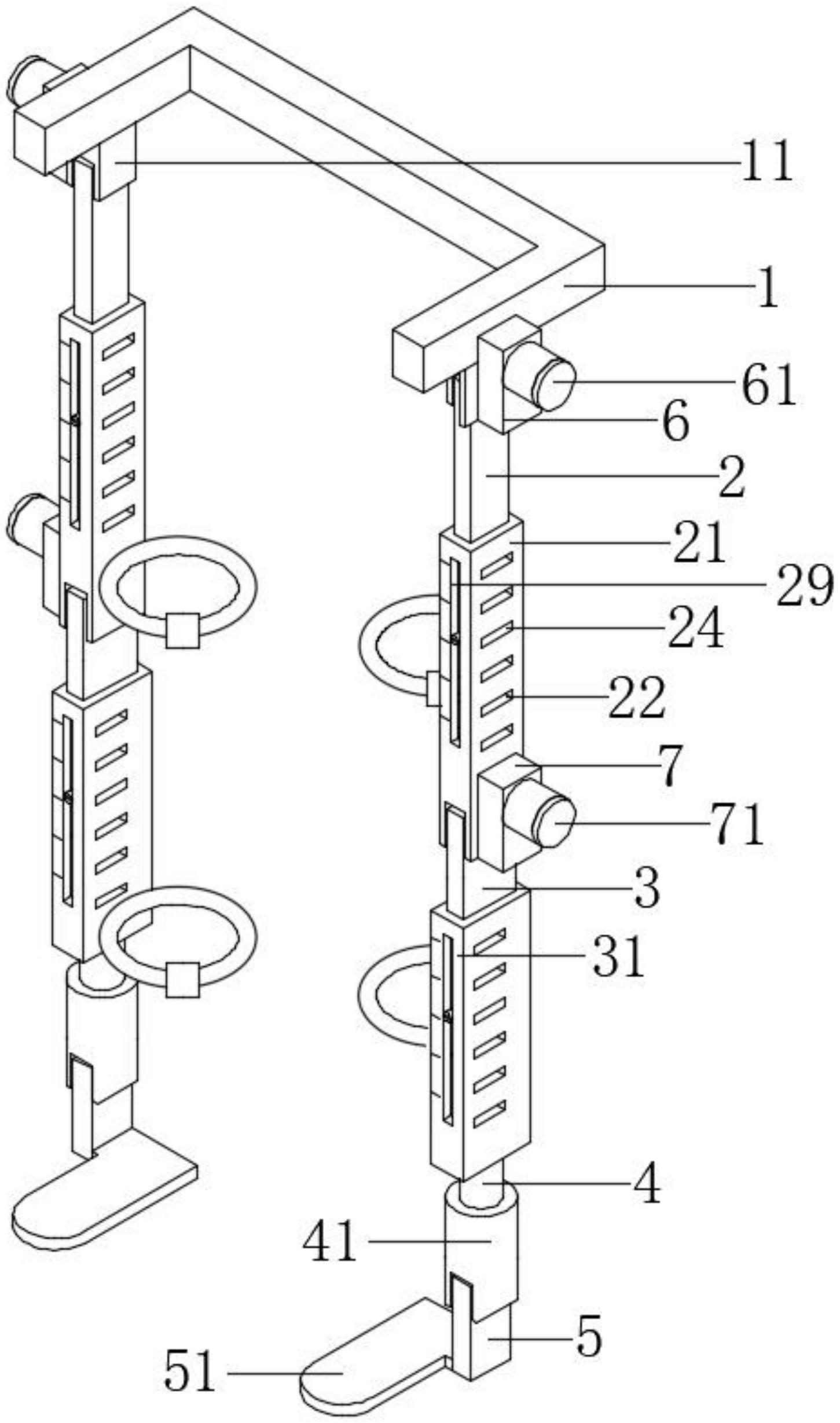
3、一种轻型化下肢助力外骨骼机器人,包括髋部支撑架,所述髋部支撑架底部固定连接有两个连接座,每个所述连接座的底部均转动连接有大腿组件,每个所述大腿组件底部均转动连接有小腿组件,每个小腿组件底部均设有脚板组件,所述大腿组件和小腿组件上均设有限制大腿组件和小腿组件长度值的限制机构,所述髋部支撑架上设有控制大腿组件转动的第一驱动机构,所述大腿组件上设有控制小腿组件转动的第二驱动机构。
4、进一步的,所述大腿组件包括第一套管和滑动在第一套管内部的大腿杆,所述大腿杆的一端固定连接有转轴,所述大腿杆通过转轴转动连接在所述连接座的底部。
5、进一步的,所述小腿组件包括第二套管和滑动在所述第二套管内部的小腿杆,所述小腿杆的一端固定连接有转轴,所述小腿杆通过转轴转动连接在所述第一套管的底部。
6、进一步的,所述限制机构包括开设在第一套管两侧面的插槽,所述大腿杆的内部开设有侧槽,所述侧槽的内部滑动连接有插块,所述插块的一端插接在所述插槽的内部,所述插块的一侧面和所述侧槽内侧壁之间通过复位弹簧相连接。
7、进一步的,所述大腿杆的内部开设有内腔,所述内腔的内部转动连接有转动杆,所述转动杆上固定连接有拉伸,所述拉伸的另一端延伸至所述侧槽的内部与所述插块固定连接,所述第一套管上开设有连接槽,所述转动杆的一端延伸至所述连接槽的内部,所述转动杆的一端开设有一字槽。
8、进一步的,所述第一驱动机构包括固定在髋部支撑架上的第一固定箱和安装在第一固定箱上的第一伺服电机,所述大腿杆的转轴延伸至所述第一固定箱的内部,所述大腿杆的转轴上固定连接有第一齿轮,所述第一伺服电机的输出转轴上固定连接有第二齿轮,第一齿轮和第二齿轮相啮合。
9、进一步的,所述第二驱动机构包括固定在第一套管上的第二固定箱和安装在第二固定箱上的第二伺服电机,所述小腿杆的转轴延伸至所述第二固定箱的内部,所述小腿杆的转轴上固定连接有第三齿轮,所述第二伺服电机的输出转轴上固定连接有第三齿轮,第二齿轮和第三齿轮相啮合。
10、进一步的,所述脚板组件包括固定在第二套管底部的底杆、连接块和脚底板,所述底杆底部设有套筒,所述底杆滑动连接在所述套筒的内部,所述底杆的底部固定连接有挡板,所述挡板的底部安装有缓冲弹簧,所述连接块铰接在所述套筒的底部,所述脚底板固定在所述连接块上。
11、与现有技术相比,本实用新型提供了一种轻型化下肢助力外骨骼机器人,具备以下有益效果。
12、该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现,本实用新型通过第一驱动机构和第二驱动机构来控制大腿组件和小腿组件的转动,从而减小人运动过程中的消耗,并通过设置的限制机构能够限制大腿组件和小腿组件的长度值,当遇到不同腿长的使用者时,通过解除限制机构可以自由调节大腿组件和小腿组件的长度,后通过限制机构重新固定长度,最终以便于装置与使用者更好的进行匹配使用。
13、本实用新型的其他优点、目标和特征,在某种程度上将在随后的说明书中进行阐述;并且在某种程度上,基于对下文的考察研究,对本领域技术人员而言将是显而易见的;或者,可以从本实用新型的实践中得到教导。
技术特征:
1.一种轻型化下肢助力外骨骼机器人,包括髋部支撑架(1),其特征在于,所述髋部支撑架(1)底部固定连接有两个连接座(11),每个所述连接座(11)的底部均转动连接有大腿组件,每个所述大腿组件底部均转动连接有小腿组件,每个小腿组件底部均设有脚板组件,所述大腿组件和小腿组件上均设有限制大腿组件和小腿组件长度值的限制机构,所述髋部支撑架(1)上设有控制大腿组件转动的第一驱动机构,所述大腿组件上设有控制小腿组件转动的第二驱动机构。
2.根据权利要求1所述的一种轻型化下肢助力外骨骼机器人,其特征在于,所述大腿组件包括第一套管(21)和滑动在第一套管(21)内部的大腿杆(2),所述大腿杆(2)的一端固定连接有转轴,所述大腿杆(2)通过转轴转动连接在所述连接座(11)的底部。
3.根据权利要求2所述的一种轻型化下肢助力外骨骼机器人,其特征在于,所述小腿组件包括第二套管(31)和滑动在所述第二套管(31)内部的小腿杆(3),所述小腿杆(3)的一端固定连接有转轴,所述小腿杆(3)通过转轴转动连接在所述第一套管(21)的底部。
4.根据权利要求3所述的一种轻型化下肢助力外骨骼机器人,其特征在于,所述限制机构包括开设在第一套管(21)两侧面的插槽(22),所述大腿杆(2)的内部开设有侧槽(23),所述侧槽(23)的内部滑动连接有插块(24),所述插块(24)的一端插接在所述插槽(22)的内部,所述插块(24)的一侧面和所述侧槽(23)内侧壁之间通过复位弹簧(25)相连接。
5.根据权利要求4所述的一种轻型化下肢助力外骨骼机器人,其特征在于,所述大腿杆(2)的内部开设有内腔(26),所述内腔(26)的内部转动连接有转动杆(27),所述转动杆(27)上固定连接有拉伸(28),所述拉伸(28)的另一端延伸至所述侧槽(23)的内部与所述插块(24)固定连接,所述第一套管(21)上开设有连接槽(29),所述转动杆(27)的一端延伸至所述连接槽(29)的内部,所述转动杆(27)的一端开设有一字槽。
6.根据权利要求5所述的一种轻型化下肢助力外骨骼机器人,其特征在于,所述第一驱动机构包括固定在髋部支撑架(1)上的第一固定箱(6)和安装在第一固定箱(6)上的第一伺服电机(61),所述大腿杆(2)的转轴延伸至所述第一固定箱(6)的内部,所述大腿杆(2)的转轴上固定连接有第一齿轮,所述第一伺服电机(61)的输出转轴上固定连接有第二齿轮,第一齿轮和第二齿轮相啮合。
7.根据权利要求6所述的一种轻型化下肢助力外骨骼机器人,其特征在于,所述第二驱动机构包括固定在第一套管(21)上的第二固定箱(7)和安装在第二固定箱(7)上的第二伺服电机(71),所述小腿杆(3)的转轴延伸至所述第二固定箱(7)的内部,所述小腿杆(3)的转轴上固定连接有第三齿轮,所述第二伺服电机(71)的输出转轴上固定连接有第三齿轮,第二齿轮和第三齿轮相啮合。
8.根据权利要求7所述的一种轻型化下肢助力外骨骼机器人,其特征在于,所述脚板组件包括固定在第二套管(31)底部的底杆(4)、连接块(5)和脚底板(51),所述底杆(4)底部设有套筒(41),所述底杆(4)滑动连接在所述套筒(41)的内部,所述底杆(4)的底部固定连接有挡板(42),所述挡板(42)的底部安装有缓冲弹簧(43),所述连接块(5)铰接在所述套筒(41)的底部,所述脚底板(51)固定在所述连接块(5)上。
技术总结
本技术公开了一种轻型化下肢助力外骨骼机器人,属外骨骼机器人技术领域。一种轻型化下肢助力外骨骼机器人,包括髋部支撑架,所述髋部支撑架底部固定连接有两个连接座,每个所述连接座的底部均转动连接有大腿组件,每个所述大腿组件底部均转动连接有小腿组件,每个小腿组件底部均设有脚板组件,所述大腿组件和小腿组件上均设有限制大腿组件和小腿组件长度值的限制机构,所述髋部支撑架上设有控制大腿组件转动的第一驱动机构;本技术当遇到不同腿长的使用者时,通过解除限制机构可以自由调节大腿组件和小腿组件的长度,后通过限制机构重新固定长度,最终以便于装置与使用者更好的进行匹配使用。
技术研发人员:李立国,郑鹏远,丁婵婵,汪建辉,李鲁亚
受保护的技术使用者:郑州大学第五附属医院
技术研发日:20220909
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!