一种机械制造用自动化夹持设备的制作方法
1.本实用新型涉及夹持装置技术领域,特别涉及一种机械制造用自动化夹持设备。
背景技术:
2.机械制造的过程中通常需要进行自动化夹持,自动化夹持装置可以增加夹持的效率,申请号为cn201921226075.6的实用新型提供的技术方案,无法根据被夹持装置的形状进行自行调节,导致容易出现夹持不稳定的情况。
技术实现要素:
3.本实用新型的目的在于至少解决现有技术中存在的技术问题之一,提供一种机械制造用自动化夹持设备,夹持机构可以对多种形状的表面进行贴合,增加夹持的便利性,且通过光电开关,实现自动夹持,且可以对夹持的距离进行预先设置,进一步增加夹持的便利性。
4.为实现上述目的,本实用新型还提供具有上述一种机械制造用自动化夹持设备,包括:
5.底板,所述底板的上表面固定连接有固定板,所述固定板的内表面螺纹连接有螺纹杆,所述螺纹杆的右表面转动连接有支撑板,所述支撑板的右表面固定连接压力传感器,所述底板的上表面固定连接有显示器;
6.光电开关、伸缩杆,所述伸缩杆的输出端固定连接有支撑块,所述支撑块的内表面设置有夹持机构,所述夹持机构包括夹持头、第一凹槽、第二凹槽与滑动片,所述第一凹槽位于夹持头的上表面,所述第二凹槽的位于夹持头的右表面,所述滑动片与夹持头的上表面固定连接。
7.根据所述的一种机械制造用自动化夹持设备,所述显示器与压力传感器电性连接,所述光电开关、按钮式开关串联,用于可以自动进行夹持。
8.根据所述的一种机械制造用自动化夹持设备,所述压力传感器、显示器、伸缩杆与外部电源连接。
9.根据所述的一种机械制造用自动化夹持设备,所述固定板的数量为两个且左右对称分布,所述支撑板与底板滑动连接。
10.根据所述的一种机械制造用自动化夹持设备,所述第一凹槽、第二凹槽均为弧形。
11.根据所述的一种机械制造用自动化夹持设备,所述夹持机构的数量为多个,左右两个所述夹持机构滑动连接,用于适应被夹持装置的形状。
12.根据所述的一种机械制造用自动化夹持设备,所述滑动片的下表面与第一凹槽滑动连接,所述夹持头的左表面与第二凹槽滑动连接。
13.根据所述的一种机械制造用自动化夹持设备,左侧所述第一凹槽、第二凹槽位于支撑块的表面。
14.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述
中变得明显,或通过本实用新型的实践了解到。
附图说明
15.下面结合附图和实施例对本实用新型进一步地说明;
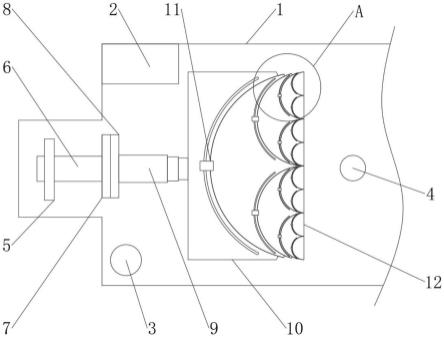
16.图1为本实用新型一种机械制造用自动化夹持设备的内部结构图;
17.图2为图1中a处结构放大示意图;
18.图3为本实用新型一种机械制造用自动化夹持设备的主视图;
19.图4为本实用新型一种机械制造用自动化夹持设备的部分结构示意图。
20.图例说明:
21.1、底板;2、显示器;3、按钮式开关;4、光电开关;5、固定板;6、螺纹杆;7、支撑板;8、压力传感器;9、伸缩杆;10、支撑块;11、滑动片;12、夹持头;13、第一凹槽;14、第二凹槽。
具体实施方式
22.本部分将详细描述本实用新型的具体实施例,本实用新型之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本实用新型的每个技术特征和整体技术方案,但其不能理解为对本实用新型保护范围的限制。
23.参照图1-4,本实用新型实施例一种机械制造用自动化夹持设备,其包括底板1,底板1的上表面固定连接有固定板5,用于对螺纹杆 6与夹持机构进行支撑,固定板5的数量为两个且左右对称分布,用于通过两个夹持机构从两侧进行夹持,支撑板7与底板1滑动连接,固定板5的内表面螺纹连接有螺纹杆6,螺纹杆6的右表面转动连接有支撑板7,支撑板7的右表面固定连接压力传感器8,用于观察夹持的力度,底板1的上表面固定连接有显示器2,用于显示传感器的数值,显示器2与压力传感器8电性连接,压力传感器8、显示器2、伸缩杆9与外部电源连接,光电开关4、按钮式开关3串联,用于可以自动进行夹持,按钮式开关3改变伸缩杆9伸缩的方向,光电开关 4实现在放置被夹持装置后自行进行伸长伸缩杆9。
24.光电开关4、伸缩杆9,伸缩杆9的输出端固定连接有支撑块10,支撑块10的内表面设置有夹持机构,夹持机构的数量为多个,用于通过较小长度的夹持机构进行旋转,增加夹持机构适应不同形状装置的能力,左右两个夹持机构滑动连接,用于适应被夹持装置的形状,夹持机构包括夹持头12、第一凹槽13、第二凹槽14与滑动片11,第一凹槽13位于夹持头12的上表面,第一凹槽13、第二凹槽14均为弧形,第二凹槽14的位于夹持头12的右表面,滑动片11与夹持头12的上表面固定连接,滑动片11的下表面与第一凹槽13滑动连接,左侧第一凹槽13、第二凹槽14位于支撑块10的表面,夹持头 12的左表面与第二凹槽14滑动连接。
25.工作原理:根据被夹持装置的宽度对支撑板7与固定板5之间的长度进行调节,调节完成后将需要夹持的装置放置在光电开关4之间,光电开关4被阻挡后触发,伸缩杆9进行伸长,不同的夹持头12在与被夹持的装置接触过程中产生转动并贴合,显示器2显示压力传感器8测得的压力,当需要将被夹持装置取下时,通过按钮式开关3缩短伸缩杆9即可。
26.上面结合附图对本实用新型实施例作了详细说明,但是本实用新型不限于上述实施例,在所述技术领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。
技术特征:
1.一种机械制造用自动化夹持设备,其特征在于,包括:底板(1),所述底板(1)的上表面固定连接有固定板(5),所述固定板(5)的内表面螺纹连接有螺纹杆(6),所述螺纹杆(6)的右表面转动连接有支撑板(7),所述支撑板(7)的右表面固定连接压力传感器(8),所述底板(1)的上表面固定连接有显示器(2);光电开关(4)、伸缩杆(9),所述伸缩杆(9)的输出端固定连接有支撑块(10),所述支撑块(10)的内表面设置有夹持机构,所述夹持机构包括夹持头(12)、第一凹槽(13)、第二凹槽(14)与滑动片(11),所述第一凹槽(13)位于夹持头(12)的上表面,所述第二凹槽(14)的位于夹持头(12)的右表面,所述滑动片(11)与夹持头(12)的上表面固定连接。2.根据权利要求1所述的一种机械制造用自动化夹持设备,其特征在于,所述显示器(2)与压力传感器(8)电性连接,所述光电开关(4)、按钮式开关(3)串联。3.根据权利要求1所述的一种机械制造用自动化夹持设备,其特征在于,所述压力传感器(8)、显示器(2)、伸缩杆(9)与外部电源连接。4.根据权利要求1所述的一种机械制造用自动化夹持设备,其特征在于,所述固定板(5)的数量为两个且左右对称分布,所述支撑板(7)与底板(1)滑动连接。5.根据权利要求1所述的一种机械制造用自动化夹持设备,其特征在于,所述第一凹槽(13)、第二凹槽(14)均为弧形。6.根据权利要求1所述的一种机械制造用自动化夹持设备,其特征在于,所述夹持机构的数量为多个,左右两个所述夹持机构滑动连接。7.根据权利要求1所述的一种机械制造用自动化夹持设备,其特征在于,所述滑动片(11)的下表面与第一凹槽(13)滑动连接,所述夹持头(12)的左表面与第二凹槽(14)滑动连接。8.根据权利要求1所述的一种机械制造用自动化夹持设备,其特征在于,左侧所述第一凹槽(13)、第二凹槽(14)位于支撑块(10)的表面。
技术总结
本实用新型公开了一种机械制造用自动化夹持设备,包括底板,所述底板的上表面固定连接有固定板,所述固定板的内表面螺纹连接有螺纹杆,所述螺纹杆的右表面转动连接有支撑板,所述支撑板的右表面固定连接压力传感器,所述底板的上表面固定连接有显示器,光电开关、伸缩杆,所述伸缩杆的输出端固定连接有支撑块,所述支撑块的内表面设置有夹持机构,所述夹持机构包括夹持头、第一凹槽、第二凹槽与滑动片,所述第一凹槽位于夹持头的上表面,所述第二凹槽的位于夹持头的右表面。通过上述结构,夹持机构可以对多种形状的表面进行贴合,增加夹持的便利性,且通过光电开关,实现自动夹持,且可以对夹持的距离进行预先设置,进一步增加夹持的便利性。的便利性。的便利性。
技术研发人员:荣铁英 杜玲 马树云
受保护的技术使用者:辽宁诺普瑞智能工业科技有限公司
技术研发日:2022.09.09
技术公布日:2023/3/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1