一种具有新型助力的工业机器人装置
本技术涉及工业机器人,具体涉及一种具有新型助力的工业机器人装置。
背景技术:
1、众所周知,工业机器人机器人是近代自动控制领域中出现的一项新技术,并成为现代机械制造中的一个重要组成部分。工业机器人显著地提高了劳动生产率,改善产品质量,对改善劳动条件和产品的快速更新换代起着十分重要的作用,加快实现工业生产机械化和自动化的步伐。尤其在高温、高压、粉尘、噪音以及带有放射性和污染的场合,应用的更为广泛。因而受到各先进国家的重视,投入大量人力物力加以研究和应用。它综合了机械工程、电子工程、计算机技术、自动控制及人工智能等多种科学的最新研究成果,是机电一体化技术的典型代表。随着科学技术的不断发展,人们对工业机器人的工作能力提出了更高的要求,不仅要求工业机器人的外形美观操作简单,而且具有定的稳定性、灵活性和开放性。
2、针对现有技术存在以下问题:
3、1、现有的高空作物工业机器人在墙面上行走时大多都是运用吸盘工具和自动化工具,而自动化工具长时间工作容易发生故障,增加了风险性,缺乏稳定性。
4、2、现有的高空作物工业机器人无法进行灵敏的活动,完成不了一些精密的修理工作,缺乏灵敏度。
5、3、现有的高空工业机器人使用效果单一,只能负责单纯的清洁或修理,增加了操作的复杂性。
技术实现思路
1、为解决上述技术问题,本实用新型所采用的技术方案是:
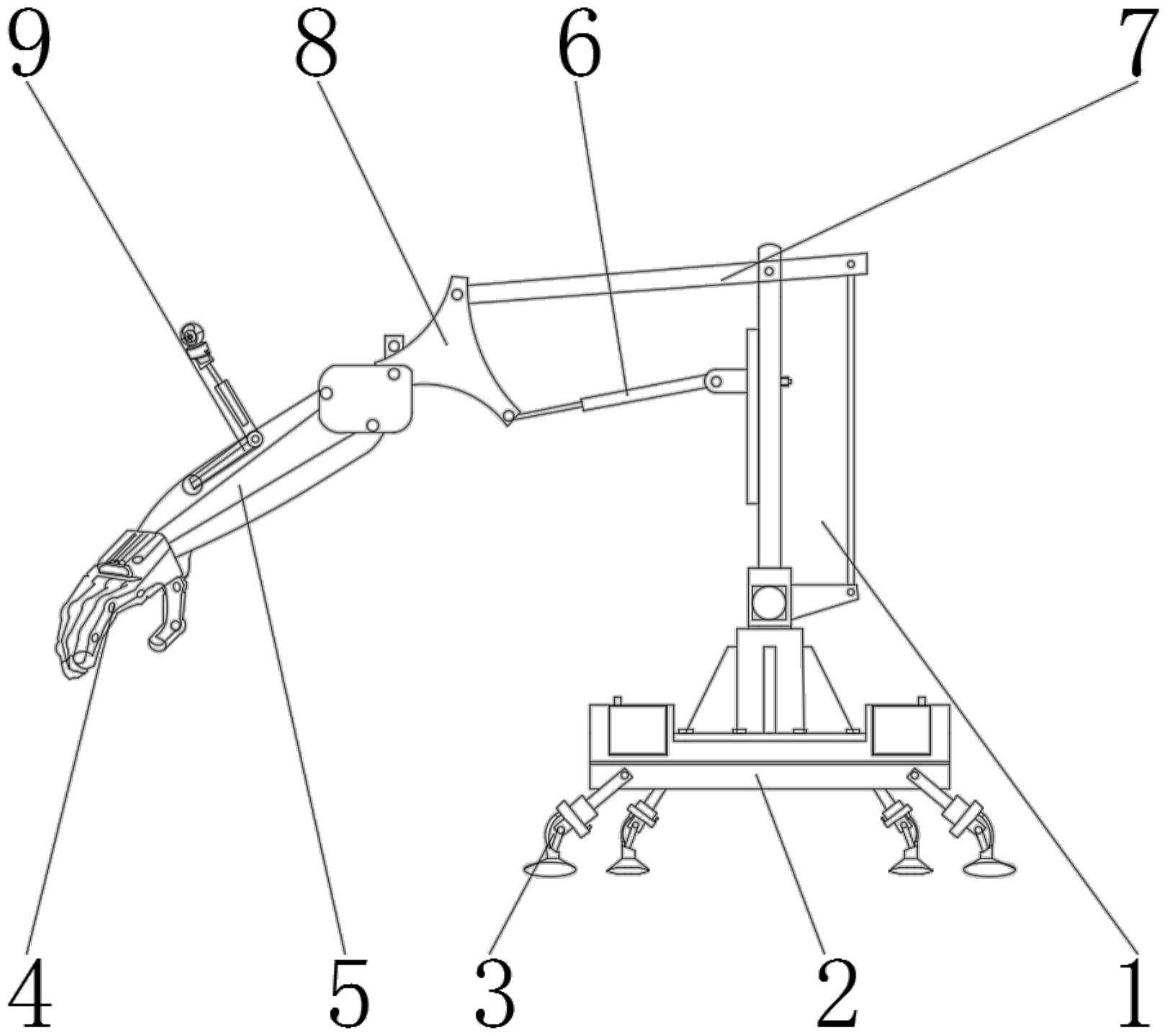
2、一种具有新型助力的工业机器人装置,包括撑杆,所述撑杆的下端固定安装有底座,所述底座下端设置有行走装置,所述撑杆上端活动安装有力臂,所述撑杆中部设置有第一伸缩杆,所述第一伸缩杆左侧设置有轴,所述轴上端活动安装有力臂,所述轴左侧设置有手臂,所述手臂上端固定安装有观察装置,所述手臂下端设置有机械手。
3、本实用新型技术方案的进一步改进在于:所述行走装置包括小型真空抽气机,所述小型真空抽气机上端设置有出气口,所述小型真空抽气机下端设置有抽气口,所述抽气口下端固定安装有抽气管,所述抽气管下端设置有吸盘。
4、本实用新型技术方案的进一步改进在于:所述吸盘上方端口与抽气管的下端固定连接,所述抽气口与吸盘上端端口可拆卸连接。
5、本实用新型技术方案的进一步改进在于:所述观察装置包括摄像头,所述摄像头下端活动安装有第二伸缩杆,所述第二伸缩杆下端设置有球形滑轮,所述球形滑轮与收纳盒活动安装。
6、本实用新型技术方案的进一步改进在于:所述观察装置与手臂固定连接,所述摄像头的下端通过螺纹槽与第二伸缩杆的上端活动连接,所述第二伸缩杆的下端与收纳盒的一侧通过球形滑轮活动连接。
7、本实用新型技术方案的进一步改进在于:所述机械手包括喷水器,所述喷水器的下端设置有活动关节,所述活动关节下端外表面设置有绝缘材料,所述活动关节的下端外表面通过强力胶与绝缘材料的外表面固定连接。
8、由于采用了上述技术方案,本实用新型相对现有技术来说,取得的技术进步是:
9、1、本实用新型提供一种具有新型助力的工业机器人装置,通过小型真空抽气机和吸盘的共同作用下,通过小型真空抽气机抽空吸盘中的空气,增大吸盘内外压强差,利用压强差增加对墙面的吸附力,实现机械臂的攀爬,增强攀爬时得稳定性,此装置极大的减少工人在高空作物的危险性,增加了工业机器人的实用性。
10、2、本实用新型提供一种具有新型助力的工业机器人装置,通过摄像头与机械手的共同作用下,实现远程操作,利用球形滑轮能够360度无死角旋转,使摄像头能够全面的观察周围环境,反馈给远程操作者,使操作者做出正确的判断,下达正确指令,机械手中的活动关节使机械手能够灵活运动,达到能够完成修理工作的效果,确保了工作效率,避免了工人自身攀爬所带来的危险性,增加了工业机器人的实用性。
11、3、本实用新型提供一种具有新型助力的工业机器人装置,通过喷水器与机械手的共同作用下,喷水器用来喷出特制的清洁水,机械手通过活动关节进行灵敏的操作使用一些清洁工具,清理物品表面的灰尘,保证物品的外观整洁,干净,实现清理灰尘的效果,可以在修理的同时清理物品,增加了工业机器人的功能性和实用性。
技术特征:
1.一种具有新型助力的工业机器人装置,包括撑杆(1),其特征在于:所述撑杆(1)的下端固定安装有底座(2),所述底座(2)下端设置有行走装置(3),所述撑杆(1)上端活动安装有力臂(7),所述撑杆(1)中部设置有第一伸缩杆(6),所述第一伸缩杆(6)左侧设置有轴(8),所述轴(8)上端活动安装有力臂(7),所述轴(8)左侧设置有手臂(5),所述手臂(5)上端固定安装有观察装置(9),所述手臂(5)下端设置有机械手(4)。
2.根据权利要求1所述的一种具有新型助力的工业机器人装置,其特征在于:所述行走装置(3)包括小型真空抽气机(31),所述小型真空抽气机(31)上端设置有出气口(34),所述小型真空抽气机(31)下端设置有抽气口(32),所述抽气口(32)下端固定安装抽气管(33),所述抽气管(33)下端设置有吸盘(35)。
3.根据权利要求2所述的一种具有新型助力的工业机器人装置,其特征在于:所述吸盘(35)上端端口与抽气管(33)的下端固定连接,所述抽气口(32)与吸盘(35)上端端口可拆卸连接。
4.根据权利要求1所述的一种具有新型助力的工业机器人装置,其特征在于:所述观察装置(9)包括摄像头(92),所述摄像头(92)下端活动安装有第二伸缩杆(93),所述第二伸缩杆(93)下端设置有球形滑轮(94),所述球形滑轮(94)与收纳盒(91)活动安装。
5.根据权利要求4所述的一种具有新型助力的工业机器人装置,其特征在于:所述观察装置(9)与手臂(5)固定连接,所述摄像头(92)的下端通过螺纹槽与第二伸缩杆(93)的上端活动连接,所述第二伸缩杆(93)的下端与收纳盒(91)的一侧通过球形滑轮(94)活动连接。
6.根据权利要求1所述的一种具有新型助力的工业机器人装置,其特征在于:所述机械手(4)包括喷水器(41),所述喷水器(41)的下端设置有活动关节(42),所述活动关节(42)下端外表面设置有绝缘材料(43),所述活动关节(42)的下端外表面通过强力胶与绝缘材料(43)的外表面固定连接。
技术总结
本技术公开了一种具有新型助力的工业机器人装置,涉及工业机器人技术领域,包括撑杆,所述撑杆的下端固定安装有底座,所述底座下端设置有行走装置,所述撑杆上端活动安装有力臂,所述撑杆中部设置有第一伸缩杆,所述第一伸缩杆左侧设置有轴。本技术通过小型真空抽气机和吸盘的共同作用下,本技术通过小型真空抽气机抽空吸盘中的空气,增大吸盘内外压强差,利用压强差增加对墙面的吸附力,实现机械臂的攀爬,增强攀爬时得稳定性,通过摄像头与机械手的相互配合,实现远程操作,利用球形滑轮能够360度无死角旋转,使摄像头能够全面的观察周围环境,反馈给远程操作者,使操作者做出正确的判断,下达正确指令。
技术研发人员:程爽,王国平,赵录怀,刘晓明,张安莉
受保护的技术使用者:西安交通大学城市学院
技术研发日:20220914
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!