一种数控机床用抓料器的制作方法
本技术属于抓料器,特别是涉及一种数控机床用抓料器。
背景技术:
1、现有的抓料器基本上都是爪形的抓料器,也就是通过抓料爪的张合来实现抓取物料,然而这种抓料器一般都是用于抓取材质较为坚硬的物料,如果是抓取材质较为柔软的物料,如布匹等,就容易造成物料从抓料器的间隙中掉落,不便于使用。
2、为解决上述问题,本实用新型提出一种数控机床用抓料器。
技术实现思路
1、本实用新型的目的在于提供一种数控机床用抓料器,解决现有的抓料器一般都是用于抓取材质较为坚硬的物料,如果是抓取材质较为柔软的物料,如布匹等,就容易造成物料从抓料器的间隙中掉落,不便于使用问题。
2、为解决上述技术问题,本实用新型是通过以下技术方案实现的:
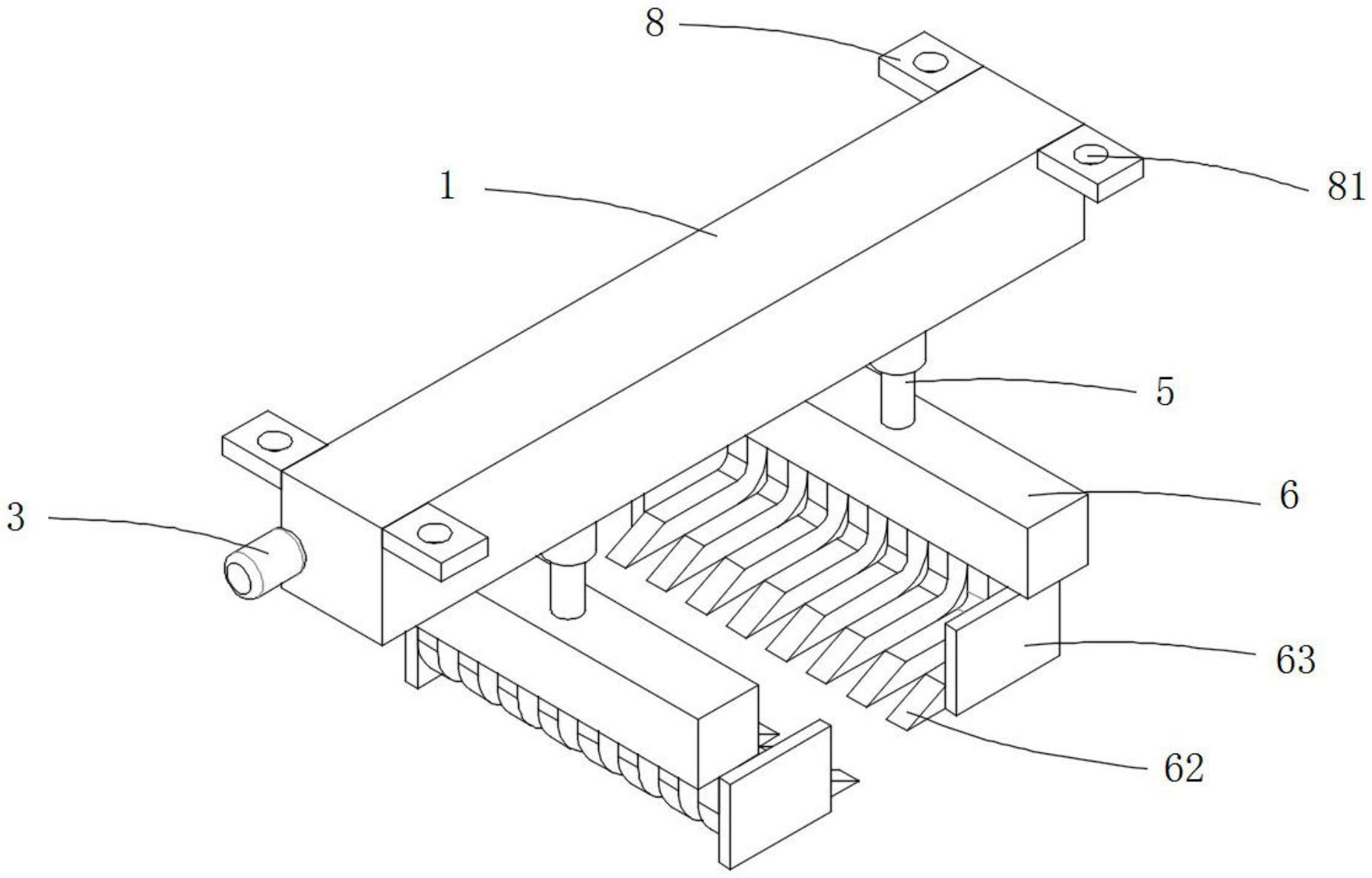
3、本实用新型为一种数控机床用抓料器,包括安装柱,所述安装柱下表面开设有滑槽,所述滑槽内滑动连接有两个对称设置的滑块,所述安装柱一侧面固定连接有电机,所述电机输出端固定连接有连接轴,所述连接轴周侧面固定连接有第一齿轮,所述第一齿轮啮合连接有第二齿轮,所述第二齿轮内部固定连接有转动轴,所述转动轴一端固定连接有丝杠,所述丝杠与两个滑块均螺纹连接,所述滑块下表面固定连接有液压杆,所述液压杆下表面固定连接有安装板,所述安装板下表面固定连接有抓手,两个所述抓手的钳爪呈交替设置,通过设置电机,电机转动可以带动丝杠转动,配合丝杠与两个滑块均螺纹连接的设置,进而可以使两个滑块相向运动,最终可以使两个抓手相互配合,将物料抓起,以便于后续对物料进行移动。
4、所述抓手一侧面固定连接有铲齿,铲齿具有一定的角度,可以更好地抓起物料。
5、所述抓手一侧面固定连接有挡板,可以防止在移动过程中,物料从抓手上掉落。
6、所述安装柱周侧面固定连接有若干固定板,所述固定板上开设有固定孔,可以使用紧固螺钉通过固定孔,将本装置固定在外部驱动装置上。
7、所述滑槽尺寸等于滑块,对滑块限位,防止滑块跟随丝杠转动,所述第一齿轮半径小于第二齿轮,降速传动,可以缓慢调节两个抓手的位置。
8、所述滑槽内固定连接有挡块,可以防止两个滑块在移动时触碰到一起。
9、本实用新型具有以下有益效果:
10、本实用新型通过设置电机,电机转动可以带动丝杠转动,配合丝杠与两个滑块均螺纹连接的设置,进而可以使两个滑块相向运动,最终可以使两个抓手相互配合,将物料抓起,以便于后续对物料进行移动。
11、当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种数控机床用抓料器,包括安装柱(1),其特征在于:所述安装柱(1)下表面开设有滑槽(2),所述滑槽(2)内滑动连接有两个对称设置的滑块(21),所述安装柱(1)一侧面固定连接有电机(3),所述电机(3)输出端固定连接有连接轴(31),所述连接轴(31)周侧面固定连接有第一齿轮(32),所述第一齿轮(32)啮合连接有第二齿轮(4),所述第二齿轮(4)内部固定连接有转动轴(41),所述转动轴(41)一端固定连接有丝杠(42),所述丝杠(42)与两个滑块(21)均螺纹连接,所述滑块(21)下表面固定连接有液压杆(5),所述液压杆(5)下表面固定连接有安装板(6),所述安装板(6)下表面固定连接有抓手(61),两个所述抓手(61)的钳爪呈交替设置。
2.根据权利要求1所述的一种数控机床用抓料器,其特征在于,所述抓手(61)一侧面固定连接有铲齿(62)。
3.根据权利要求1所述的一种数控机床用抓料器,其特征在于,所述抓手(61)一侧面固定连接有挡板(63)。
4.根据权利要求1所述的一种数控机床用抓料器,其特征在于,所述安装柱(1)周侧面固定连接有若干固定板(8),所述固定板(8)上开设有固定孔(81)。
5.根据权利要求1所述的一种数控机床用抓料器,其特征在于,所述滑槽(2)尺寸等于滑块(21),所述第一齿轮(32)半径小于第二齿轮(4)。
6.根据权利要求1所述的一种数控机床用抓料器,其特征在于,所述滑槽(2)内固定连接有挡块(7)。
技术总结
本技术公开了一种数控机床用抓料器,涉及抓料器技术领域。本技术包括安装柱,安装柱下表面开设有滑槽,滑槽内滑动连接有两个对称设置的滑块,安装柱一侧面固定连接有电机,电机输出端固定连接有连接轴,连接轴周侧面固定连接有第一齿轮,第一齿轮啮合连接有第二齿轮,第二齿轮内部固定连接有转动轴,转动轴一端固定连接有丝杠,丝杠与两个滑块均螺纹连接,滑块下表面固定连接有液压杆。本技术通过设置电机,电机转动可以带动丝杠转动,配合丝杠与两个滑块均螺纹连接的设置,进而可以使两个滑块相向运动,最终可以使两个抓手相互配合,将物料抓起,以便于后续对物料进行移动。
技术研发人员:吕相前
受保护的技术使用者:佛山陈顺机械设备有限公司
技术研发日:20220923
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!