机器人机械臂关节处防灰装置的制作方法
本技术涉及机器人,更具体地说,本技术涉及机器人机械臂关节处防灰装置。
背景技术:
1、"巡检机器人"基于ocr和图像识别能力,能模拟专业的人工操作,在全站多级页面以及各个场景进行点击、识别、检查等巡检操作,可以实现app页面自动化巡检监控,7*24小时不间断检查核心功能流程。
2、现有技术中的机器人机械臂关节处防灰装置,在使用过程中,针对巡检机器人,通常采用一组机械臂进行视觉巡检仪的位置调节,在机器人小车移动过程中,配合视觉巡检仪完成巡检操作,然而由于实际巡检环境影响,且实际机器人机械臂的关节处为动作间,实际在动作过程中,尤其对旋转巡检仪过程中,关节处缝隙活动较大,使得环境中的灰尘容易进入到关节缝隙中,从而使得机械臂关节动作阻塞,影响巡检效果的同时,增加了机械臂关节处的磨损量,降低了实际使用寿命,使用效果不佳。
技术实现思路
1、为了克服现有技术的不足,本实用新型提供了机器人机械臂关节处防灰装置,具有有效防尘以及有效防撞的优点。
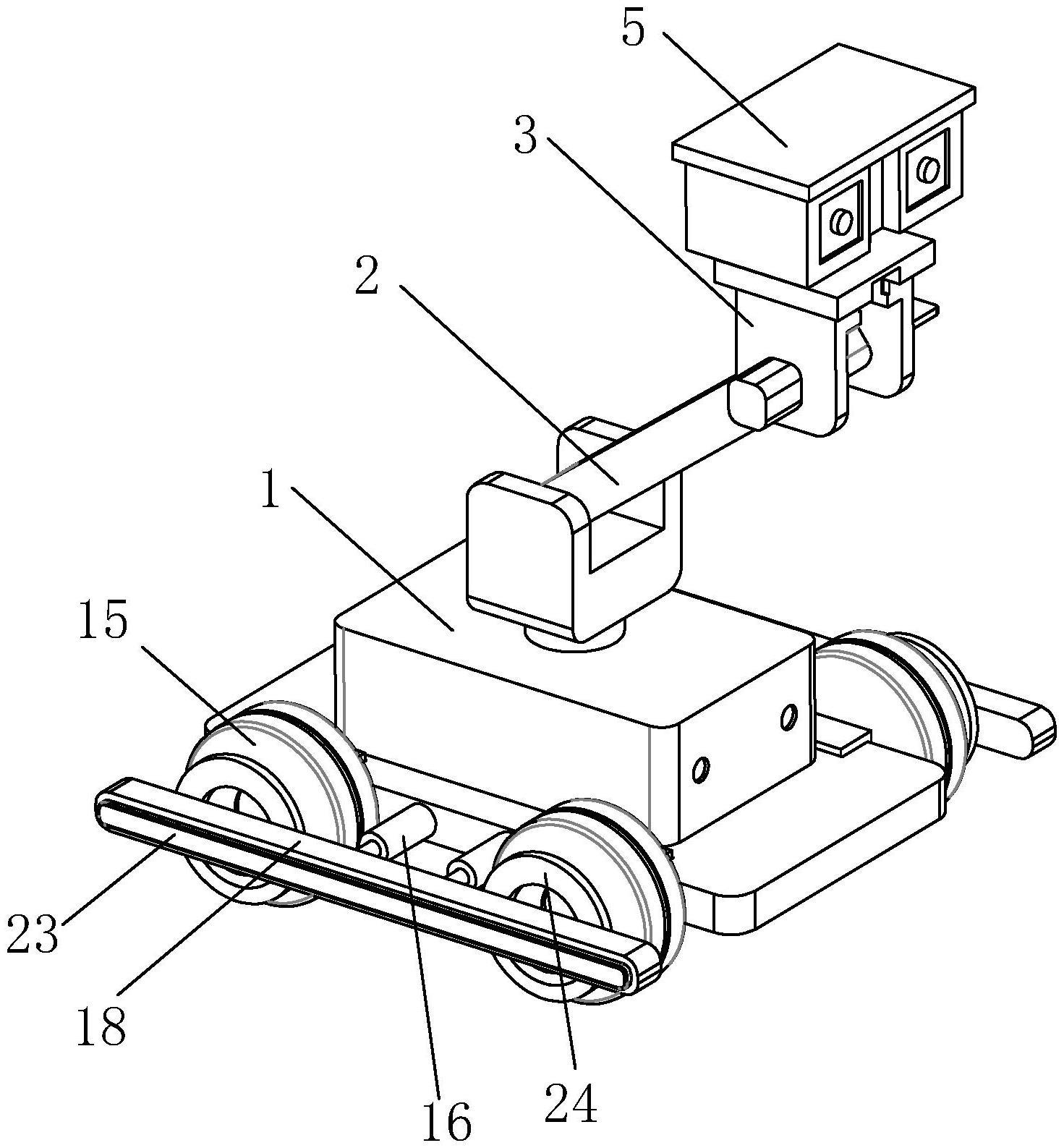
2、为实现上述目的,本实用新型提供如下技术方案:机器人机械臂关节处防灰装置,包括移动机构,所述移动机构的顶面活动安装有下机械臂,所述下机械臂的顶面活动安装有上机械臂,所述上机械臂的顶面固定连接有固定管,所述上机械臂的顶部设有巡检仪,所述巡检仪的底面固定连接有安装套,所述安装套的外表面与固定管活动套接,所述巡检仪的底面固定连接有密封套,所述密封套的底面固定套接有密封环,所述密封环的底面开设有气孔,所述上机械臂的侧面设有供气机构,所述供气机构与密封套相连通,所述密封套位于安装固定管的外侧,所述移动机构的侧面设有脚轮。
3、作为本实用新型的优选技术方案,所述固定管的内表面固定套接有卡环,所述安装套的外表面开设有环槽,所述环槽的内表面与卡环活动套接。
4、通过利用卡环和环槽的活动套接 ,使得安装套和固定管之间具有良好的转动效果,保证上机械臂与巡检仪具有良好的活动效果。
5、作为本实用新型的优选技术方案,所述上机械臂的内部固定连接有安装板,所述安装板的顶面固定安装有电机,所述电机的输出轴与安装套固定连接。
6、通过利用电机的输出轴与安装套固定连接,实现巡检仪的活动控制。
7、作为本实用新型的优选技术方案,所述供气机构包括支撑板、气泵和气管,所述支撑板固定连接在上机械臂的侧面上,所述气泵固定安装在支撑板的顶面上,所述气管固定连通在气泵和密封套之间。
8、通过利用供气机构将气体经由气管通入到密封套中,从而使得上机械臂和巡检仪连接关节处具有向外的流通气流,从而将附近灰尘向外输送,有效避免灰尘进入,提高防尘效果。
9、作为本实用新型的优选技术方案,所述移动机构的侧面固定安装有侧管,所述侧管的内部活动套接有套杆,所述套杆的端面固定连接有防撞板,所述防撞板的内侧面固定连接有刹车环。
10、通过利用防撞板进行刚性防护,避免外部设备剧烈碰撞下使得机器人底部的移动机构损坏,且利用防撞板在碰撞时带动刹车环靠近并压紧脚轮,实现脚轮的转动减速,避免碰撞后向弹射方向继续快速碰撞,延缓碰撞后速度提高巡检机器人快速停机的操作时间。
11、作为本实用新型的优选技术方案,所述防撞板的正面开设有安装槽,所述安装槽的内表面固定套接有弹性垫。
12、通过利用弹性垫,实现碰撞初期的缓冲,避免碰撞瞬间震动效果对机器人的上的零部件的震动损害。
13、作为本实用新型的优选技术方案,所述侧管的内部设有弹簧,所述套杆的内端固定连接有连接板,所述弹簧的两端分别与连接板和移动机构固定连接,所述套杆的外表面固定套接有限位环,所述限位环位于侧管的内部。
14、通过利用弹簧的弹性,实现碰撞缓冲的同时,提供复位效果,保证碰撞后防撞板可以快速复位。
15、与现有技术相比,本实用新型的有益效果如下:
16、1、本实用新型通过在上机械臂的侧面增设供气机构,并在巡检仪的底面固定连接密封套,且使得密封套位于固定管的外侧,且在密封套的底面固定套接密封环,并在密封环的底面开设气孔,使得供气机构中的气管与固定管连通,在进行巡检操作过程中,启动供气机构,使得供气机构经由气管不断将空气充入到密封套中,使得安装套在上机械臂顶部旋转过程中,气流从密封套处将经由气孔流出,使得环境中的灰尘经由气流向外吹动远离上机械臂和安装套处的关节位置,有效避免灰尘进入,大大提高实际运动效果。
17、2、本实用新型通过在移动机构的侧面固定连接侧管,并在侧管的内部活动套接套杆,且使得套杆的外端面固定连接防撞板,并在防撞杆的内侧面固定连接环形刹车环,当侧面碰撞发生时,随着侧面受压带动防撞杆移动,进而使得刹车环移动并压紧脚轮的正面,从而增大摩擦力,实现对脚轮碰撞时的刹车减速,主动降低碰撞后的车速,迅速实现停车,避免连续碰撞,提高防撞效果。
技术特征:
1.机器人机械臂关节处防灰装置,包括移动机构(1),其特征在于:所述移动机构(1)的顶面活动安装有下机械臂(2),所述下机械臂(2)的顶面活动安装有上机械臂(3),所述上机械臂(3)的顶面固定连接有固定管(4),所述上机械臂(3)的顶部设有巡检仪(5),所述巡检仪(5)的底面固定连接有安装套(6),所述安装套(6)的外表面与固定管(4)活动套接,所述巡检仪(5)的底面固定连接有密封套(9),所述密封套(9)的底面固定套接有密封环(10),所述密封环(10)的底面开设有气孔(11),所述上机械臂(3)的侧面设有供气机构(12),所述供气机构(12)与密封套(9)相连通,所述密封套(9)位于安装固定管(4)的外侧,所述移动机构(1)的侧面设有脚轮(15)。
2.根据权利要求1所述的机器人机械臂关节处防灰装置,其特征在于:所述固定管(4)的内表面固定套接有卡环(8),所述安装套(6)的外表面开设有环槽(7),所述环槽(7)的内表面与卡环(8)活动套接。
3.根据权利要求1所述的机器人机械臂关节处防灰装置,其特征在于:所述上机械臂(3)的内部固定连接有安装板(13),所述安装板(13)的顶面固定安装有电机(14),所述电机(14)的输出轴与安装套(6)固定连接。
4.根据权利要求1所述的机器人机械臂关节处防灰装置,其特征在于:所述供气机构(12)包括支撑板(121)、气泵(122)和气管(123),所述支撑板(121)固定连接在上机械臂(3)的侧面上,所述气泵(122)固定安装在支撑板(121)的顶面上,所述气管(123)固定连通在气泵(122)和密封套(9)之间。
5.根据权利要求1所述的机器人机械臂关节处防灰装置,其特征在于:所述移动机构(1)的侧面固定安装有侧管(16),所述侧管(16)的内部活动套接有套杆(17),所述套杆(17)的端面固定连接有防撞板(18),所述防撞板(18)的内侧面固定连接有刹车环(24)。
6.根据权利要求5所述的机器人机械臂关节处防灰装置,其特征在于:所述防撞板(18)的正面开设有安装槽(22),所述安装槽(22)的内表面固定套接有弹性垫(23)。
7.根据权利要求5所述的机器人机械臂关节处防灰装置,其特征在于:所述侧管(16)的内部设有弹簧(21),所述套杆(17)的内端固定连接有连接板(20),所述弹簧(21)的两端分别与连接板(20)和移动机构(1)固定连接,所述套杆(17)的外表面固定套接有限位环(19),所述限位环(19)位于侧管(16)的内部。
技术总结
本技术涉及机器人技术领域,且公开了机器人机械臂关节处防灰装置,包括移动机构,所述移动机构的顶面活动安装有下机械臂,所述下机械臂的顶面活动安装有上机械臂,所述上机械臂的顶面固定连接有固定管。本技术通过使得密封套位于固定管的外侧,且在密封套的底面固定套接密封环,并在密封环的底面开设气孔,使得供气机构中的气管与固定管连通,在进行巡检操作过程中,启动供气机构,使得供气机构经由气管不断将空气充入到密封套中,使得安装套在上机械臂顶部旋转过程中,气流从密封套处将经由气孔流出,使得环境中的灰尘经由气流向外吹动远离上机械臂和安装套处的关节位置,有效避免灰尘进入,大大提高实际运动效果。
技术研发人员:孙诚,欧阳峰,盛亚明,韦波
受保护的技术使用者:中电昱创(苏州)智能科技有限公司
技术研发日:20220923
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!