一种可折叠机械臂及抓取机器人
本申请涉及机械臂,尤其涉及一种可折叠机械臂及抓取机器人。
背景技术:
1、机械臂是机械工业发展过程中的重要成果,它基于仿生学原理,模拟人体上肢运动的部分功能,可按照预定要求完成相应的操作。
2、目前的机械臂为了便于使用,一般会装配在可以移动的载具上,当机械臂装配在移动载具上时,机械臂会占用载具较大的空间;另外,装配后的机械臂也会导致移动载具的重心发生较大的偏移,影响载具的行驶稳定性。
技术实现思路
1、有鉴于此,本申请的目的在于提出一种可折叠机械臂及抓取机器人,以解决现有技术中机械臂装配在载具上时重心不稳而影响稳定性的问题。
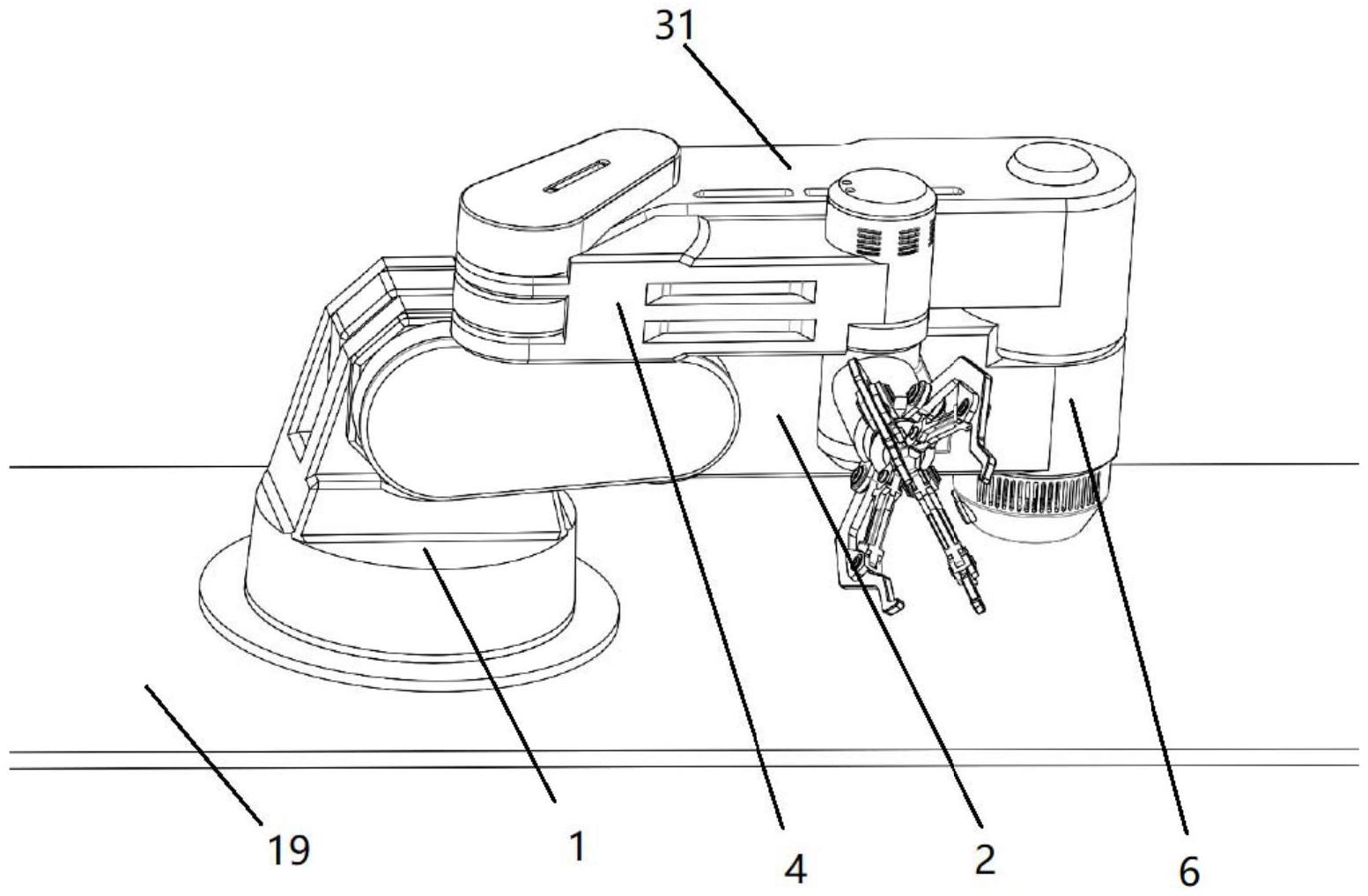
2、基于上述目的,本申请提供了一种可折叠机械臂,包括:
3、顺次铰接设置的安装底座、座臂、大臂、小臂;
4、所述大臂与所述座臂的侧壁铰接,且所述大臂由凸出于所述座臂设置的第一驱动件带动转动;当所述座臂相对所述安装底座折叠时,所述第一驱动件凸出的自由端面与所述安装底座的底面平齐;
5、所述座臂上设有用于抵接所述大臂的抵接平面,当所述大臂相对所述座臂折叠时,所述小臂与所述大臂铰接的至少部分区域位于所述抵接平面上。
6、进一步地,所述大臂包括相对折弯且固定连接的第一臂和第二臂,所述第一臂与所述第二臂之间形成弯折区,所述小臂被配置为能折叠至所述弯折区内。
7、进一步地,所述第二臂距离所述第一臂的最远点到所述第一臂的距离大于所述小臂的宽度。
8、进一步地,所述座臂靠近所述安装底座的一端侧壁设有第二驱动件,所述安装底座和所述座臂共同穿设有第一驱动轴,所述第二驱动件和所述第一驱动轴之间经第一链轮组传动连接,以使所述座臂受所述第二驱动件驱动而相对所述安装底座转动。
9、进一步地,所述第一链轮组包括:卡接所述第二驱动件的驱动端上的第一主动链轮,及卡接于所述第一驱动轴上的第一从动链轮,所述第一主动链轮和所述第一从动链轮均位于所述座臂的一侧面上。
10、进一步地,所述第一主动链轮的轮径小于所述第一从动链轮的轮径。
11、进一步地,所述大臂靠近所述小臂的一端装设有第三驱动件,所述小臂和所述大臂上共同穿设有第二驱动轴,所述第三驱动件和所述第二驱动轴经第二链轮组传动连接,以使所述小臂受所述第三驱动件驱动而相对所述大臂转动。
12、进一步地,所述第二链轮组包括:卡接所述第三驱动件的驱动端上的第二主动链轮,及卡接所述第二驱动轴上的第二从动链轮,所述第二主动链轮和所述第二从动链轮均位于所述大臂的一侧面上。
13、进一步地,所述小臂背离所述大臂的一端铰接有抓手座,所述抓手座用以安装机械爪,所述小臂上设有第四驱动件,所述第四驱动件的驱动端穿设所述抓手座中,并与所述抓手座固定连接。
14、此外,本申请还提供了抓取机器人,包括:
15、外部平台,其上设置有第五驱动件;
16、如上任一项所述的可折叠机械臂,所述可折叠机械臂的安装底座与所述第五驱动件的驱动端固定连接,以使所述安装底座能够相对所述外部平台转动;
17、机械爪,安装于所述可折叠机械臂的抓手座上。
18、本申请提供的可折叠机械臂,在座臂上设置有凸出座臂设置的第一驱动件,大臂经由第一驱动件驱动转动,当大臂相对安装底座折叠时,第一驱动件凸出的自由端面与安装底座的底面平齐,从而使第一驱动件的自由端面和安装底座抵接设置,避免大臂在折叠后的端部悬空,有效提升了大臂折叠后的支撑稳定性,此外,大臂相对座臂折叠时,小臂和大臂的至少部分铰接区域位于抵接平面上,可以避免小臂在折叠后的端部悬空,提升小臂折叠后的支撑稳定性,大臂、小臂在折叠后均被安装底座支撑,有效避免在运输时晃动而出现损坏隐患。
技术特征:
1.一种可折叠机械臂,其特征在于,包括:
2.根据权利要求1所述的可折叠机械臂,其特征在于,所述大臂包括相对折弯且固定连接的第一臂和第二臂,所述第一臂与所述第二臂之间形成弯折区,所述小臂被配置为能折叠至所述弯折区内。
3.根据权利要求2所述的可折叠机械臂,其特征在于,所述第二臂距离所述第一臂的最远点到所述第一臂的距离大于所述小臂的宽度。
4.根据权利要求1所述的可折叠机械臂,其特征在于,所述座臂靠近所述安装底座的一端侧壁设有第二驱动件,所述安装底座和所述座臂共同穿设有第一驱动轴,所述第二驱动件和所述第一驱动轴之间经第一链轮组传动连接,以使所述座臂受所述第二驱动件驱动而相对所述安装底座转动。
5.根据权利要求4所述的可折叠机械臂,其特征在于,所述第一链轮组包括:卡接所述第二驱动件的驱动端上的第一主动链轮,及卡接于所述第一驱动轴上的第一从动链轮,所述第一主动链轮和所述第一从动链轮均位于所述座臂的一侧面上。
6.根据权利要求5所述的可折叠机械臂,其特征在于,所述第一主动链轮的轮径小于所述第一从动链轮的轮径。
7.根据权利要求1所述的可折叠机械臂,其特征在于,所述大臂靠近所述小臂的一端装设有第三驱动件,所述小臂和所述大臂上共同穿设有第二驱动轴,所述第三驱动件和所述第二驱动轴经第二链轮组传动连接,以使所述小臂受所述第三驱动件驱动而相对所述大臂转动。
8.根据权利要求7所述的可折叠机械臂,其特征在于,所述第二链轮组包括:卡接所述第三驱动件的驱动端上的第二主动链轮,及卡接所述第二驱动轴上的第二从动链轮,所述第二主动链轮和所述第二从动链轮均位于所述大臂的一侧面上。
9.根据权利要求1所述的可折叠机械臂,其特征在于,所述小臂背离所述大臂的一端铰接有抓手座,所述抓手座用以安装机械爪,所述小臂上设有第四驱动件,所述第四驱动件的驱动端穿设所述抓手座中,并与所述抓手座固定连接。
10.抓取机器人,其特征在于,包括:
技术总结
本技术提供了一种可折叠机械臂及抓取机器人,属于机器人技术领域,其中,可折叠机械臂包括顺次铰接设置的安装底座、座臂、大臂、小臂,大臂与座臂的侧壁铰接,且大臂由凸出于座臂设置的第一驱动件带动转动;当大臂相对安装底座折叠时,第一驱动件凸出的自由端面与安装底座的底面平齐,大臂上设有抵接平面,抵接平面所在侧壁与铰接侧壁相对设置,当大臂相对座臂折叠时,小臂与大臂的至少部分铰接区域位于抵接平面上。本技术提供的可折叠机械臂,能够利用第一驱动件提供抵接支撑,并利用小臂和大臂的铰接区域抵接支撑,从而提升折叠后的整体支撑稳定性,并能在折叠后降低重心,有利于移动和运输。
技术研发人员:谢霞,周凯强,徐柳,王晓燕,张晓丽,张健,马超,王云
受保护的技术使用者:中国人民解放军陆军军事交通学院
技术研发日:20220926
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!