六轴钻孔机的制作方法
本技术涉及钻孔机,尤其涉及一种六轴钻孔机。
背景技术:
1、轮胎模具制造过程中因模具精度高、形状复杂,所以制造工艺非常复杂,每个零件的制作过程都耗费大量人力物力,在其中的花纹块零件制作过程中,因花纹块表面需要加工小直径气孔,尤其半钢模具因花纹块是铸造加工而成,造成模具上气孔位置与理论位置有稍微位移,一般的目前行业内通常使用简陋设备人工手工加工,有的使用高端进口五轴设备加工,加工编程需要耗费大量人工,且编程软件使用复杂,编程周期及验证周期都非常长,且购买进口五轴设备投资成本非常高。
2、综上可知,现有技术在实际使用上显然存在不便与缺陷,所以有必要加以改进。
技术实现思路
1、针对上述的缺陷,本实用新型的目的在于提供一种六轴钻孔机,其可以通过使用六轴机器人替代进口五轴设备,在机械臂臂上加装钻孔动力装置,使用ai相机识别技术,将铸造后的花纹块上气孔点位置识别,将识别后的坐标通讯给机械臂臂,进而带动钻孔装置进行钻孔动作,直至工件上所有孔加工完毕,同时还设置了多方位固定夹具,保证工件的夹持的精度和稳定性。
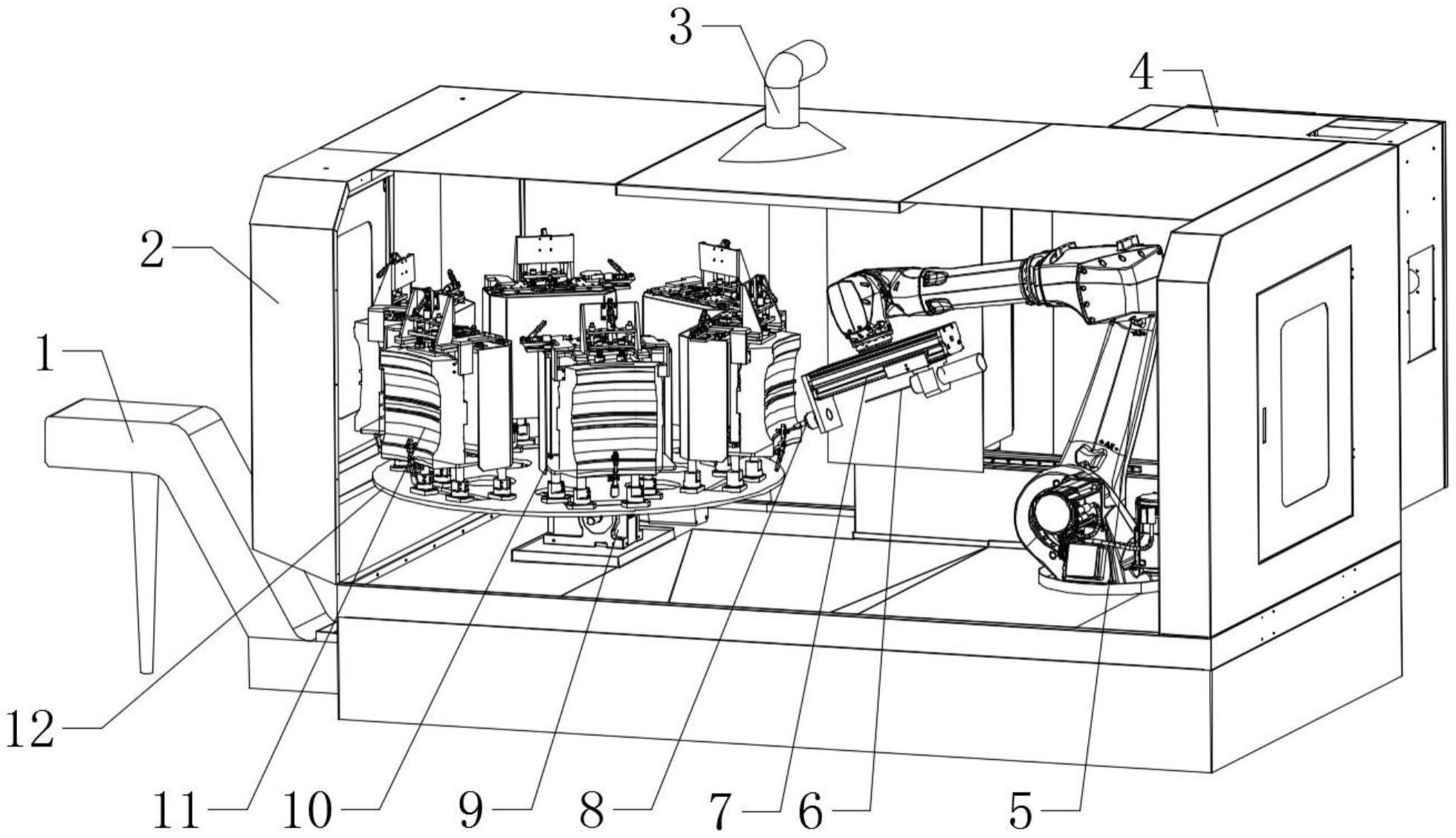
2、为了实现上述目的,本实用新型提供一种六轴钻孔机,包括:主架体,所述主架体上设有机械臂,所述机械臂的前端部固设有钻孔组件;物料盘,所述物料盘上固设有对工件进行夹持定位的若干夹具,所述物料盘的底部设有驱动所述物料盘步进式转动的驱动电机;在钻孔的前一个工位处设有对工件进行图像采集的相机,所述相机对工件的打孔点进行识别并反馈到控制机构,所述控制机构将执行信号发送到机械臂对所述工件进行钻孔。
3、根据本实用新型的六轴钻孔机,所述钻孔组件包括滑轨和滑动连接于所述滑轨上的滑块,所述滑块上固设有钻头,所述滑块通过电力驱动或者通过高压气体驱动。
4、根据本实用新型的六轴钻孔机,所述滑轨邻近所述工件的一端设有对所述钻头进行定位的钻头套,所述钻头在对工件进行钻孔时首先穿过所述钻头套。
5、根据本实用新型的六轴钻孔机,所述夹具包括夹具壳体,以及设置于所述壳体上对工件进行夹持固定的左右固定组件、前后固定组件和上下固定组件,所述夹具壳体的底部通过一夹具底座固设于所述物料盘的顶部。
6、根据本实用新型的六轴钻孔机,所述夹具壳体的底部设有下限位板,所述工件的底部抵接于所述下限位板,所述前后固定组件固设于所述下限位板的底部,所述前后固定组件包括压紧自锁手柄,所述压紧自锁手柄的顶部设有压紧头,所述压紧自锁手柄在对所述工件前后压紧后自锁。
7、根据本实用新型的六轴钻孔机,所述上下固定组件设置于所述夹具壳体顶部的前侧,所述上下固定组件包括下压自锁手柄,所述下压自锁手柄的底部固设有一压紧板,所述压紧板与所述下压自锁手柄之间设有压紧弹簧,所述下压自锁手柄在将所述工件压紧后自锁。
8、根据本实用新型的六轴钻孔机,所述左右固定组件设置于所述夹具壳体的顶部,所述左右固定组件包括导轨、滑动连接于所述导轨上的两个夹紧头和驱动所述夹紧头同时相向滑动的夹紧自锁手柄,所述夹紧头的前端设置于所述工件的两侧。
9、根据本实用新型的六轴钻孔机,所述夹具壳体的顶部位于两个所述夹紧头的中间转动连接有一转动杆,所述转动杆的中间转动连接于所述夹具壳体的顶部,所述转动杆的两端分别铰接有一连杆,两个所述连杆远离所述转动杆的一端分别铰接于所述夹紧头上,所述夹紧自锁手柄的一端铰接于其中一个所述夹紧头上。
10、根据本实用新型的六轴钻孔机,所述夹紧头通过一滑动板滑动连接于所述导轨上。
11、根据本实用新型的六轴钻孔机,所述主架体的底部设有出料口,所述出料口的底部设有将工件输送到外侧的输送带,所述主架体的顶部设有除尘口,所述相机采用ai工业相机。
12、本实用新型提供了一种六轴钻孔机,包括:主架体,所述主架体上设有机械臂,机械臂采用六轴机械臂,通过六轴机械臂代替国外进口的五轴机械臂,减少了设备的成本,所述机械臂的前端部固设有钻孔组件,通过钻孔组件和机械臂配合,对工件的预定位置进行钻孔操作;物料盘,所述物料盘上固设有对工件进行夹持定位的若干夹具,所述物料盘的底部设有驱动所述物料盘步进式转动的驱动电机,通过在物料盘上设置多个夹具对工件进行固定,保证钻孔时可以实现连续对工件进行打孔操作;在钻孔的前一个工位处设有对工件进行图像采集的相机,通过ai工业相机对采集工件需要打孔的位置处的坐标,通过所述相机对工件的打孔的坐标点进行识别并反馈到控制机构,所述控制机构将执行信号发送到机械臂对所述工件进行钻孔,实现了对工件的打孔位置的精准定位,综上,本实用新型产生的技术效果是通过使用六轴机器人替代进口五轴设备,在机械臂臂上加装钻孔动力装置,使用ai相机识别技术,将铸造后的花纹块上气孔点位置识别,将识别后的坐标通讯给机械臂臂,进而带动钻孔装置进行钻孔动作,直至工件上所有孔加工完毕,同时还设置了多方位固定夹具,保证工件的夹持的精度和稳定性。
技术特征:
1.一种六轴钻孔机,其特征在于,包括:
2.根据权利要求1所述的六轴钻孔机,其特征在于,所述夹具包括夹具壳体,以及设置于所述壳体上对工件进行夹持固定的左右固定组件、前后固定组件和上下固定组件,所述夹具壳体的底部通过一夹具底座固设于所述物料盘的顶部。
3.根据权利要求2所述的六轴钻孔机,其特征在于,所述夹具壳体的底部设有下限位板,所述工件的底部抵接于所述下限位板,所述前后固定组件固设于所述下限位板的底部,所述前后固定组件包括压紧自锁手柄,所述压紧自锁手柄的顶部设有压紧头,所述压紧自锁手柄在对所述工件前后压紧后自锁。
4.根据权利要求2所述的六轴钻孔机,其特征在于,所述上下固定组件设置于所述夹具壳体顶部的前侧,所述上下固定组件包括下压自锁手柄,所述下压自锁手柄的底部固设有一压紧板,所述压紧板与所述下压自锁手柄之间设有压紧弹簧,所述下压自锁手柄在将所述工件压紧后自锁。
5.根据权利要求2所述的六轴钻孔机,其特征在于,所述左右固定组件设置于所述夹具壳体的顶部,所述左右固定组件包括导轨、滑动连接于所述导轨上的两个夹紧头和驱动所述夹紧头同时相向滑动的夹紧自锁手柄,所述夹紧头的前端设置于所述工件的两侧。
6.根据权利要求5所述的六轴钻孔机,其特征在于,所述夹具壳体的顶部位于两个所述夹紧头的中间转动连接有一转动杆,所述转动杆的中间转动连接于所述夹具壳体的顶部,所述转动杆的两端分别铰接有一连杆,两个所述连杆远离所述转动杆的一端分别铰接于所述夹紧头上,所述夹紧自锁手柄的一端铰接于其中一个所述夹紧头上。
7.根据权利要求6所述的六轴钻孔机,其特征在于,所述夹紧头通过一滑动板滑动连接于所述导轨上。
8.根据权利要求1~7任一项所述的六轴钻孔机,其特征在于,所述主架体的底部设有出料口,所述出料口的底部设有将工件输送到外侧的输送带,所述主架体的顶部设有除尘口,所述相机采用ai工业相机,所述机械臂采用六轴机械臂。
技术总结
本技术适用于钻孔机技术领域,提供了一种六轴钻孔机,包括:主架体,主架体上设有机械臂,机械臂的前端部固设有钻孔组件;物料盘,物料盘上固设有对工件进行夹持定位的若干夹具,物料盘的底部设有驱动物料盘步进式转动的驱动电机;在钻孔的前一个工位处设有对工件进行图像采集的相机,相机对工件的打孔点进行识别并反馈到控制机构,控制机构将执行信号发送到机械臂对工件进行钻孔,借此,本技术通过使用六轴机器人替代进口五轴设备,在机械臂臂上加装钻孔动力装置,使用AI相机识别技术,将铸造后的花纹块上气孔点位置识别,将识别后的坐标通讯给机械臂臂,进而带动钻孔装置进行钻孔动作,直至工件上所有孔加工完毕。
技术研发人员:王亚东,周传海,张良,唐维坊,戴长奇,陆超群,陈须志
受保护的技术使用者:软控联合科技有限公司
技术研发日:20220929
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!