机器人搬运机械手爪的制作方法
1.本实用新型涉及一种机械辅助设备,特别是涉及一种机器人搬运机械手爪。
背景技术:
2.夹爪广泛应用于工业机器人,是一种机械夹持结构。在生产流水线中经常要用到周转箱,传统的周转箱的搬运方式大都是由人工完成,而现有的夹爪大都只适用生产流水线上生产使用,不适于周转箱等大型产品的搬运。
技术实现要素:
3.本实用新型的目的在于提供一种高度同步、动作稳定可靠的机器人搬运机械手爪。
4.为实现上述目的,本实用新型的技术解决方案是:
5.本实用新型是一种机器人搬运机械手爪,包括安装底板、装配底板、两个手爪、动力机构;所述装配底板固定在安装底板上,两个手爪相对而设且都滑接在装配底板的正面,动力机构安装在装配底板的背面且与两个手爪连接,驱动两个手爪来回移动。
6.所述动力机构包括气缸、转接块、主动齿条、从动齿条、齿轮、轴承、轴承座;所述轴承座固定在装配底板的中部,在轴承座与装配底板之间形成一个容置腔;所述气缸的缸体固定安装在装配底板上,气缸的活塞杆杆端通过转接块与主动齿条的一端连接,主动齿条与一个手爪连接,主动齿条与齿轮啮合,齿轮与从动齿条啮合,从动齿条与另一个手爪连接,齿轮上的转轴通过轴承可旋转的安装在轴承座和装配底板上且齿轮位于轴承座与装配底板之间的容置腔内。
7.所述轴承座为一个门字形构件,中部悬空而形成容置腔。
8.本实用新型还包括两个垫块;所述装配底板的两端分别通过垫块固定在安装底板上,在装配底板与安装底板之间形成安装空间。
9.本实用新型还包括两个滑动模组;所述两个滑动模组平行安装在装配底板的正面,两个手爪的内端滑槽分别连接在两个滑动模组上。
10.采用上述方案后,由于本实用新型包括安装底板、装配底板、两个手爪、动力机构,安装在装配底板上的动力机构驱动两个手爪向相或反相移动,从而夹持产品;此外,动力机构中的主动齿条、齿轮、从动齿条依次啮合,气缸驱动主动齿条移动从而带动从动齿条同步动作,具有高度同步、动作稳定可靠的优点。
11.下面结合附图和具体实施例对本实用新型作进一步的说明。
附图说明
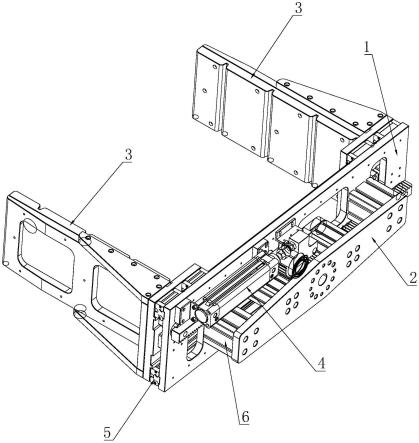
12.图1是本实用新型的轴测图;
13.图2是本实用新型的俯视图;
14.图3是本实用新型装配底板、两个手爪、动力机构装配的轴测图;
15.图4是本实用新型装配底板、两个手爪、动力机构装配的立体分解图;
16.图5是本实用新型动力机构的轴测图;
17.图6是本实用新型安装在机械手上的示意图。
具体实施方式
18.如图1、图2所示,本实用新型是一种机器人搬运机械手爪,包括安装底板1、装配底板2、两个手爪3、动力机构4、两个滑动模组5、两个垫块6。
19.所述安装底板1安装在机械手10上(如图6所示),装配底板2的两端分别通过垫块6固定在安装底板1上,在装配底板2与安装底板1之间形成安装空间。所述两个滑动模组5平行安装在装配底板2的正面,两个手爪3相对而设且分别与两个滑动模组5连接,使得两个手爪3滑接在装配底板2上,动力机构4安装在装配底板2的背面且与两个手爪3连接,驱动两个手爪3来回移动。
20.如图3-图5所示,所述动力机构4包括气缸41、转接块42、主动齿条43、从动齿条44、齿轮45、轴承46、轴承座47;所述轴承座47固定在装配底板2的中部,在轴承座47与装配底板2之间形成一个容置腔;所述气缸41的缸体固定安装在装配底板2上,气缸41的活塞杆杆端通过转接块42与主动齿条43的一端连接,主动齿条43与一个手爪3连接,主动齿条43与齿轮45啮合,齿轮45与从动齿条44啮合,从动齿条44与另一个手爪3连接,齿轮45上的转轴451通过轴承46可旋转的安装在轴承座47和装配底板2上且齿轮45位于轴承座47与装配底板2之间的容置腔内。所述轴承座47为一个门字形构件,中部悬空而形成容置腔。
21.本实用新型的工作原理:
22.1、安装在装配底板2上的动力机构4驱动两个手爪3向相或反相移动,从而夹持产品。
23.2、动力机构中的主动齿条43、齿轮45、从动齿条44依次啮合,气缸41驱动主动齿条43移动,主动齿条43通过齿轮45驱动从动齿条44同步移动,主动齿条43与从动齿条44分别驱动两个手爪3同步移动。
24.以上所述,仅为本实用新型较佳实施例而已,故不能以此限定本实用新型实施的范围,即依本实用新型申请专利范围及说明书内容所作的等效变化与修饰,皆应仍属本实用新型专利涵盖的范围内。
技术特征:
1.一种机器人搬运机械手爪,其特征在于:包括安装底板、装配底板、两个手爪、动力机构;所述装配底板固定在安装底板上,两个手爪相对而设且都滑接在装配底板的正面,动力机构安装在装配底板的背面且与两个手爪连接,驱动两个手爪来回移动。2.根据权利要求1所述机器人搬运机械手爪,其特征在于:所述动力机构包括气缸、转接块、主动齿条、从动齿条、齿轮、轴承、轴承座;所述轴承座固定在装配底板的中部,在轴承座与装配底板之间形成一个容置腔;所述气缸的缸体固定安装在装配底板上,气缸的活塞杆杆端通过转接块与主动齿条的一端连接,主动齿条与一个手爪连接,主动齿条与齿轮啮合,齿轮与从动齿条啮合,从动齿条与另一个手爪连接,齿轮上的转轴通过轴承可旋转的安装在轴承座和装配底板上且齿轮位于轴承座与装配底板之间的容置腔内。3.根据权利要求2所述机器人搬运机械手爪,其特征在于:所述轴承座为一个门字形构件,中部悬空而形成容置腔。4.根据权利要求1所述机器人搬运机械手爪,其特征在于:还包括两个垫块;所述装配底板的两端分别通过垫块固定在安装底板上,在装配底板与安装底板之间形成安装空间。5.根据权利要求1所述机器人搬运机械手爪,其特征在于:还包括两个滑动模组;所述两个滑动模组平行安装在装配底板的正面,两个手爪的内端滑槽分别连接在两个滑动模组上。
技术总结
本实用新型公开了一种机器人搬运机械手爪,包括安装底板、装配底板、两个手爪、动力机构;所述安装底板安装在机械手上,装配底板固定在安装底板上,两个手爪相对而设且都滑接在装配底板的正面,动力机构安装在装配底板的背面且与两个手爪连接,驱动两个手爪来回移动。由于本实用新型安装在装配底板上的动力机构驱动两个手爪向相或反相移动,从而夹持产品;此外,动力机构中的主动齿条、齿轮、从动齿条依次啮合,气缸驱动主动齿条移动从而带动从动齿条同步动作,具有高度同步、动作稳定可靠的优点。点。点。
技术研发人员:黄信智 陈宾
受保护的技术使用者:厦门华晔精密科技有限公司
技术研发日:2022.10.09
技术公布日:2023/3/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1