一种浮动夹爪及机械手的制作方法
1.本实用新型涉及自动化设备技术领域,尤其涉及一种浮动夹爪及机械手。
背景技术:
2.在自动化设备制造业中,工件移载常通过夹爪或机械手夹取实现,这就要求夹爪或机械手与工件具有较高的配合精度。然而,一方面,工件可能出现过定位或欠定位;另一方面,夹爪或机械手动作存在偏差,导致夹取时动作不准确,配合度不高,甚至出现夹爪或机械手碰撞工件的情况,需要进行动作修正,严重时还会产生损伤工件、损坏动作机构等问题。
技术实现要素:
3.基于上述问题,本实用新型的目的在于提供一种浮动夹爪及机械手,具备位置补偿功能,降低配合要求,实现对工件准确抓取。
4.为达上述目的,一方面,本实用新型采用以下技术方案:
5.一种浮动夹爪,其包括安装座,安装座上设置有直线导轨,直线导轨上架设有滑座,滑座上设置有用于夹取工件的气动手指,安装座上且位于滑座滑动方向的两端分别设置有固定杆,固定杆与滑座之间设置有弹性缓冲件,使气动手指能沿着直线导轨左右浮动。
6.特别地,弹性缓冲件为拉簧,拉簧的一端勾挂于滑座上,另一端勾挂于固定杆上。
7.特别地,固定杆呈倒l形地竖立于安装座上,且固定杆上设置有使拉簧准确勾挂的凹槽。
8.特别地,安装座包括上固定板、下固定板和连接上固定板与下固定板的支撑柱,直线导轨平置于下固定板的上表面。
9.特别地,下固定板上开设有允许气动手指的夹爪穿行的行程槽。
10.特别地,安装座上穿设有与工件接触的导柱,导柱上套设有弹簧。
11.特别地,安装座上对称设置有两个直线导轨,并设置有两组气动手指,从而同时夹住工件的两侧。
12.另一方面,本实用新型采用以下技术方案:
13.一种机械手,其包括机械臂,机械臂的末端设置有上述的浮动夹爪。
14.综上,本实用新型的有益效果为,所述浮动夹爪及机械手使夹持部件浮动布置,从而对位置偏差进行补偿,降低了配合精度要求,避免与工件硬接触情况发生,实现了更为准确、简洁的抓取动作。
附图说明
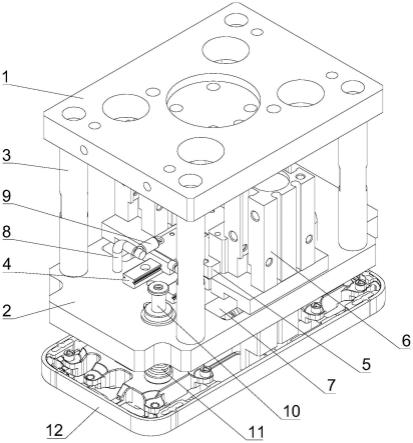
15.图1是本实用新型实施例提供的浮动夹爪的结构示意图;
16.图2是本实用新型实施例提供的浮动夹爪的正视图;
17.图3是本实用新型实施例提供的浮动夹爪的侧视图;
18.图4是本实用新型实施例提供的机械手的结构示意图。
具体实施方式
19.下面详细描述本实用新型的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的零部件或具有相同或类似功能的零部件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
20.在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
21.在本实用新型的描述中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一特征和第二特征直接接触,也可以包括第一特征和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
22.下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
23.请参阅图1至图3所示,本优选实施例提供一种浮动夹爪,包括安装座,此处的安装座包括上固定板1、下固定板2和连接上固定板1与下固定板2的支撑柱3。
24.安装座上设置有直线导轨4,具体地,直线导轨4平置于下固定板2的上表面,直线导轨4上架设有滑座5,滑座5上设置有用于夹取工件12的气动手指6,下固定板2上开设有允许气动手指6的夹爪穿行的行程槽7。本实施例中,安装座上对称设置有两个直线导轨4,并设置有两组气动手指6,从而同时夹住工件12的两侧。
25.安装座上且位于滑座5滑动方向的两端分别设置有固定杆8,固定杆8与滑座5之间设置有弹性缓冲件9,使气动手指6能沿着直线导轨4左右浮动,从而能够补偿少量位置偏差。
26.此处的弹性缓冲件9优选为拉簧,拉簧的一端勾挂于滑座5上,滑座5上预留有勾挂孔;拉簧的另一端勾挂于固定杆8上,特别地,固定杆8呈倒l形地竖立于安装座上,且固定杆8上设置有使拉簧准确勾挂的凹槽,保证结构可靠性。
27.另外,安装座上穿设有与工件12接触的导柱10,导柱10上套设有弹簧11。导柱10能穿过工件12上的开孔,锁定工件12的位置,弹簧11具备一定的缓冲作用,避免浮动夹爪下行过量,且使得在抓取工件12时,能压紧工件12保证其稳定。
28.此外,如图4所示,本实施例还提供一种机械手,其包括机械臂13,机械臂13的末端设置有上述的浮动夹爪,具体是与安装座的上固定板1固连,满足多种夹取、移载工况。
29.综上,上述的浮动夹爪及机械手使夹持部件浮动布置,从而对位置偏差进行补偿,降低了配合精度要求,避免与工件硬接触情况发生,实现了更为准确、简洁的抓取动作。
30.以上实施例只是阐述了本实用新型的基本原理和特性,本实用新型不受上述事例
限制,在不脱离本实用新型精神和范围的前提下,本实用新型还有各种变化和改变,这些变化和改变都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.一种浮动夹爪,其特征在于,包括安装座,所述安装座上设置有直线导轨,所述直线导轨上架设有滑座,所述滑座上设置有用于夹取工件的气动手指,所述安装座上且位于滑座滑动方向的两端分别设置有固定杆,所述固定杆与所述滑座之间设置有弹性缓冲件,使所述气动手指能沿着所述直线导轨左右浮动。2.根据权利要求1所述的浮动夹爪,其特征在于:所述弹性缓冲件为拉簧,拉簧的一端勾挂于所述滑座上,另一端勾挂于所述固定杆上。3.根据权利要求2所述的浮动夹爪,其特征在于:所述固定杆呈倒l形地竖立于所述安装座上,且固定杆上设置有使所述拉簧准确勾挂的凹槽。4.根据权利要求1所述的浮动夹爪,其特征在于:所述安装座包括上固定板、下固定板和连接所述上固定板与所述下固定板的支撑柱,所述直线导轨平置于所述下固定板的上表面。5.根据权利要求4所述的浮动夹爪,其特征在于:所述下固定板上开设有允许所述气动手指的夹爪穿行的行程槽。6.根据权利要求1所述的浮动夹爪,其特征在于:所述安装座上穿设有与工件接触的导柱,所述导柱上套设有弹簧。7.根据权利要求1所述的浮动夹爪,其特征在于:所述安装座上对称设置有两个直线导轨,并设置有两组气动手指,从而同时夹住工件的两侧。8.一种机械手,其特征在于,包括机械臂,所述机械臂的末端设置有权利要求1-7任一项所述的浮动夹爪。
技术总结
本实用新型涉及自动化设备技术领域,尤其涉及一种浮动夹爪及机械手。其中浮动夹爪包括安装座,安装座上设置有直线导轨,直线导轨上架设有滑座,滑座上设置有用于夹取工件的气动手指,安装座上且位于滑座滑动方向的两端分别设置有固定杆,固定杆与滑座之间设置有弹性缓冲件,使气动手指能沿着直线导轨左右浮动。机械手包括机械臂,机械臂的末端设置有上述的浮动夹爪。上述浮动夹爪及机械手使夹持部件浮动布置,从而对位置偏差进行补偿,降低了配合精度要求,避免与工件硬接触情况发生,实现了更为准确、简洁的抓取动作。简洁的抓取动作。简洁的抓取动作。
技术研发人员:许海建 卞景民
受保护的技术使用者:无锡沃格自动化科技股份有限公司
技术研发日:2022.10.27
技术公布日:2023/2/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1