一种可调节距离的智能机械手的制作方法
本技术涉及智能机械手,更具体地说,本技术涉及一种可调节距离的智能机械手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,在实际使用中,仍存在以下问题:机械手按照既定程序去活动,只能对固定位置的物体进行抓取并进行转移,但对于不同位置的物品,则无法实现成功抓取。
技术实现思路
1、为了克服现有技术的上述缺陷,本实用新型的实施例提供一种可调节距离的智能机械手,以解决现有技术的机械手按照既定程序去活动,只能对固定位置的物体进行抓取并进行转移,但对于不同位置的物品,则无法实现成功抓取的问题。
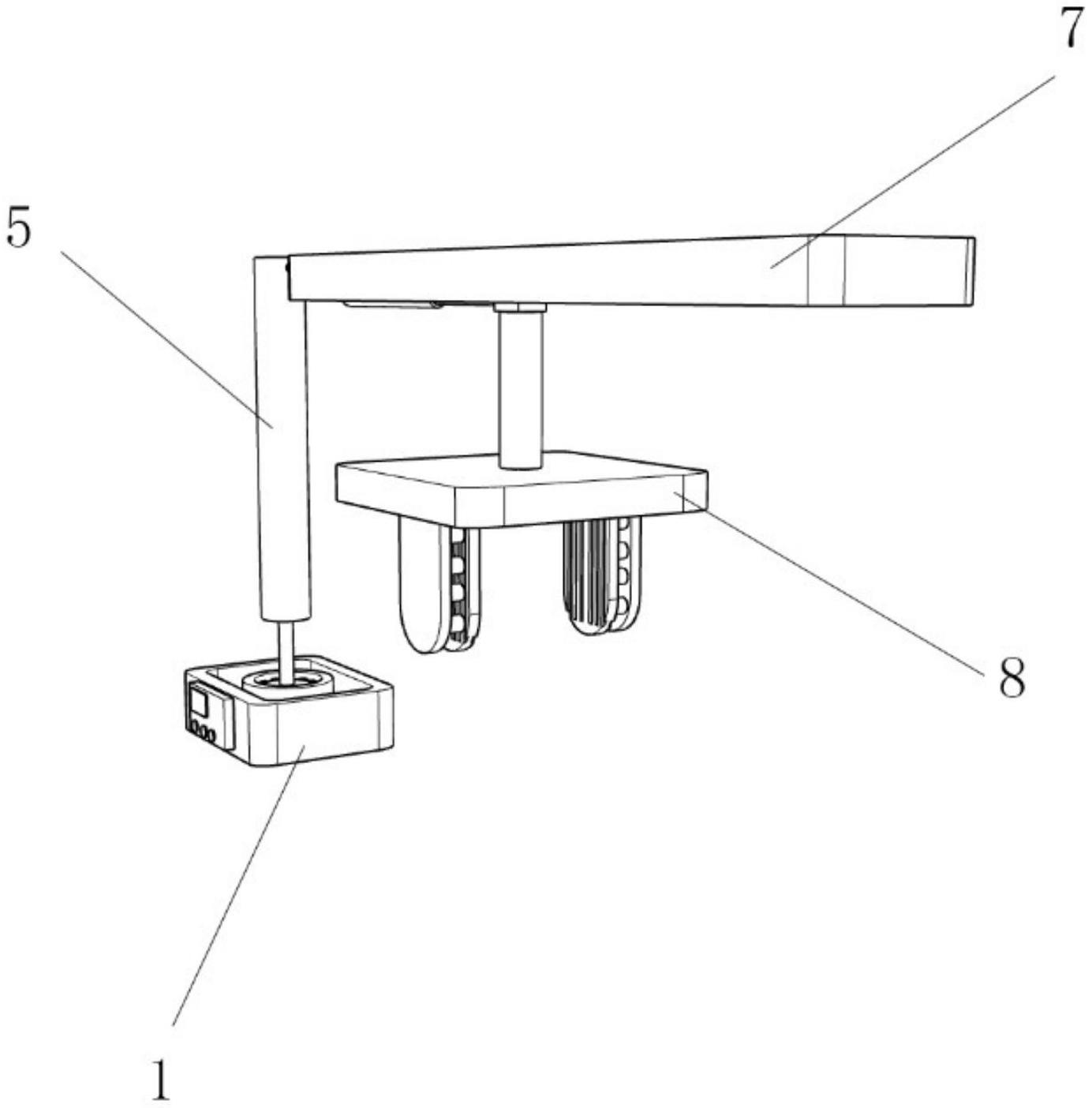
2、为解决上述技术问题,本实用新型提供如下技术方案:一种可调节距离的智能机械手,包括底盒,所述底盒的正面固定安装有控制面板,所述底盒的内部固定安装有保护盒,所述保护盒的内部固定安装有伺服电机,所述伺服电机与控制面板电性连接,所述伺服电机的顶部固定安装有转动轴,所述转动轴的一侧固定安装有连接轴,所述连接轴的一侧固定安装有调节组件,所述调节组件的底部固定安装有机械手夹持组件。
3、其中,所述调节组件包括存储盒,所述存储盒的一侧与连接轴的一侧固定连接,所述存储盒的底部开设有滑槽,所述滑槽的内部滑动连接有滑块,所述滑块的一侧固定安装有水平液压杆,所述滑块的底部固定安装有垂直液压杆。
4、其中,所述水平液压杆的一侧与滑槽的内部固定连接,所述水平液压杆与控制面板电性连接,所述垂直液压杆与控制面板电性连接。
5、其中,所述机械手夹持组件包括承接盒,所述承接盒的顶部设有视觉识别感应器,所述承接盒的顶部与垂直液压杆的底部固定连接,所述承接盒底部的一侧开设有内滑槽,所述内滑槽的内部滑动连接有内滑块,所述内滑块的一侧固定安装有直线驱动电机,所述直线驱动电机的一侧与内滑槽内部的一侧固定连接。
6、其中,所述内滑块的底部固定安装有夹持块,所述夹持块的一侧固定安装有缓冲柱,所述缓冲柱的一侧固定安装有橡胶垫,所述夹持块的数量为两个,所述橡胶垫的数量与夹持块的数量一一对应。
7、本实用新型的上述技术方案的有益效果如下:
8、上述方案中,所述可调节距离的智能机械手通过调节组件的设置,操作人员在按压控制面板上的按钮以后,水平液压杆会推动滑块进行直线运动,调整底部的机械手夹持组件与物件的距离,承接盒顶部的视觉识别感应器感应到物件以后,垂直液压杆控制机械手夹持组件进行下降,再对物件进行抓取,达到了可以让机械手对不同位置物品进行抓取的效果;上述方案中,所述可调节距离的智能机械手通过机械手夹持组件的设置,当机械手夹持组件进行下降以后,直线驱动电机会启动,推动夹持块之间相互靠近,使得夹持块两侧的橡胶垫将物品夹持住,随后液压杆控制机械手夹持组件进行上升,伺服电机对机械手夹持组件的角度进行调整,使得机械手夹持组件将物品转移到相应的位置放下即可,橡胶垫达到了保护物品表面的效果,防止夹持块夹持力度过大将物品夹坏。
技术特征:
1.一种可调节距离的智能机械手,包括底盒(1),其特征在于,所述底盒(1)的正面固定安装有控制面板(2),所述底盒(1)的内部固定安装有保护盒(3),所述保护盒(3)的内部固定安装有伺服电机(4),所述伺服电机(4)与控制面板(2)电性连接,所述伺服电机(4)的顶部固定安装有转动轴(5),所述转动轴(5)的一侧固定安装有连接轴(6),所述连接轴(6)的一侧固定安装有调节组件(7),所述调节组件(7)的底部固定安装有机械手夹持组件(8)。
2.根据权利要求1所述的可调节距离的智能机械手,其特征在于,所述调节组件(7)包括存储盒(71),所述存储盒(71)的一侧与连接轴(6)的一侧固定连接,所述存储盒(71)的底部开设有滑槽(72),所述滑槽(72)的内部滑动连接有滑块(73),所述滑块(73)的一侧固定安装有水平液压杆(74),所述滑块(73)的底部固定安装有垂直液压杆(75)。
3.根据权利要求2所述的可调节距离的智能机械手,其特征在于,所述水平液压杆(74)的一侧与滑槽(72)的内部固定连接,所述水平液压杆(74)与控制面板(2)电性连接,所述垂直液压杆(75)与控制面板(2)电性连接。
4.根据权利要求1所述的可调节距离的智能机械手,其特征在于,所述机械手夹持组件(8)包括承接盒(81),所述承接盒(81)的顶部设有视觉识别感应器,所述承接盒(81)的顶部与垂直液压杆(75)的底部固定连接,所述承接盒(81)底部的一侧开设有内滑槽(82),所述内滑槽(82)的内部滑动连接有内滑块(83),所述内滑块(83)的一侧固定安装有直线驱动电机(84),所述直线驱动电机(84)的一侧与内滑槽(82)内部的一侧固定连接。
5.根据权利要求4所述的可调节距离的智能机械手,其特征在于,所述内滑块(83)的底部固定安装有夹持块(85),所述夹持块(85)的一侧固定安装有缓冲柱(86),所述缓冲柱(86)的一侧固定安装有橡胶垫(87),所述夹持块(85)的数量为两个,所述橡胶垫(87)的数量与夹持块(85)的数量一一对应。
技术总结
本技术公开了一种可调节距离的智能机械手,包括底盒,底盒的正面固定安装有控制面板,底盒的内部固定安装有保护盒,保护盒的内部固定安装有伺服电机,伺服电机与控制面板电性连接,伺服电机的顶部固定安装有转动轴,转动轴的一侧固定安装有连接轴,连接轴的一侧固定安装有调节组件。上述方案中,可调节距离的智能机械手通过调节组件的设置,操作人员在按压控制面板上的按钮以后,水平液压杆会推动滑块进行直线运动,调整底部的机械手夹持组件与物件的距离,承接盒顶部的视觉识别感应器感应到物件以后,垂直液压杆控制机械手夹持组件进行下降,再对物件进行抓取,达到了可以让机械手对不同位置物品进行抓取的效果。
技术研发人员:路隆强
受保护的技术使用者:徐州嘉研数科智能科技有限公司
技术研发日:20221101
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!