一种新型间隔棒安装机器人的制作方法
本实用涉及间隔棒安装,具体为一种新型间隔棒安装机器人。
背景技术:
1、随着我国电力工业的发展,在加快电站建设的同时,电网建设同步加快。在输电线路建设中,迫切需要解决的课题是提高输电线路输送容量,合理安排日趋紧张的线路走廊,提高线路的输送容量最直接的办法是提高电压等级和增加出线回路,但若增加出线回路,不仅要增加投资,同时也增加处理线路走廊的难度,紧凑型线路采用多分裂导线,增大分裂间距和缩小邻相导线间的相间距离的方法,达到提高输电线路自然输送功率和减小线路走廊占地的目的,但存在一个突出矛盾就是输电线路在导线微风振动,尾流诱发振动等各种外界因素作用下易引起邻相导线碰线和线间空气绝缘击穿,解决此矛盾最有效办法是在邻相导线间安装绝缘间隔棒,从而保证邻相导线间有足够的绝缘距离,因此,推广机械化施工,减少人力资源投入,成为输电线路工程施工领域的一种发展趋势。
2、越是多分裂间隔棒,整体体积重量越大,特别是针电网,由于线网布局高空复杂条件的制约,常规的间隔棒安装施工往往只能靠人工安装,在高空中通过人员安装间隔棒将会增加人员在高空中安全负担,稍有不慎人员或者间隔棒会从高空中掉落,将会造成对人员和物资的损失,使用人工进行安装的时候,将会提高工程造价,同时人员在施工的时候,将会受到时间和空间的限制,这将会导致降低工作人员进行安装间隔棒的工作效率,同时将会增加工程负担。
3、实用内容
4、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种新型间隔棒安装机器人,解决了的通过只能使用人工对间隔棒进行安装,同时将会提高无法快速地安装间隔棒的数量与工作效率的问题。
5、为实现以上目的,本实用新型采用了如下技术方案:一种新型间隔棒安装机器人,包括吊装机构支撑结构与执行机械手臂机构,所述吊装机构底部设置有支撑结构,所述吊装机构底部设置有执行机械手臂机构,所述支撑结构设置在执行机械手臂机构中下部;
6、所述执行机械手臂机构包括机械手臂二、机械手臂一、转动杆一、固定台一、固定杆、固定块一、液压缸与转动柱,所述机械手臂二左端中部设置有机械手臂一,所述机械手臂一下端中部转动连接有转动杆一,所述转动杆一下端中部设置有固定台一,所述固定台一下端中部设置有转动柱,所述转动柱下端中部固定连接有液压缸,所述固定台一相远离一侧均固定连接有固定杆,所述固定杆位于机械手臂二下方,所述固定杆上端中部设置有固定块一。
7、本实用新型具有如下有益效果:
8、所述吊装机构包括转动杆一、支撑板、固定块二、固定绳、电机二、安装块、固定板、支撑柱一、滑动轮一、滑动轮三与联接柱,所述支撑板左右相对一侧均设置有滑动轮一,所述滑动轮一左右相对一侧均固定连接有电机二,所述支撑板上端中部设置有多个固定绳,所述固定绳下端中部设置有滑动轮三,所述滑动轮三前后相对一侧均转动连接有安装块,所述支撑板左右相对一侧中部均设置有固定板,所述滑动轮一前后相对一侧均设置有转动杆一,所述转动杆一下端中部固定连接有安装块,所述转动杆一左右相对一侧设置有电机一,所述电机一后侧中部固定连接有固定块二,所述固定块二后侧中部固定连接有联接柱,所述电机一前侧中部固定连接有支撑板。
9、本实用新型具有如下有益效果:
10、所述支撑结构包括观察器、夹持槽、货仓、转动杆二、支撑柱一、支撑柱二、固定台二与绳孔,所述固定台二上端左侧固定连接有观察器,所述固定台二前后相对一侧均固定连接有夹持槽,所述夹持槽左右相靠近一侧中部均固定连接有转动杆二,所述转动杆二左右相靠近一侧均设置有绳孔,所述绳孔相对一侧设置有支撑柱一,所述支撑柱一前后相对一侧均固定连接有固定台二,所述固定台二内侧壁右侧设置有货仓,所述固定台二前后相对一侧中部均设置有支撑柱二。
11、本实用新型具有如下有益效果:
12、所述支撑柱二贯穿转动杆二并处于转动杆二下端,所述转动杆二设置在支撑板下方,所述支撑板下端设置有滑动轮二,所述滑动轮二下端中部固定连接有支撑柱二。
13、本实用新型具有如下有益效果:
14、所述液压缸设置在固定台一下方,所述液压缸下端中部固定连接有固定台二,所述固定台二设置在支撑板下方。
15、本实用新型具有如下有益效果:
16、所述固定绳输出端固定连接在绳孔输入端处,所述绳孔设置在支撑板下方。
17、本实用新型具有如下有益效果:
18、所述支撑板下端中部设置有机械手臂一与机械手臂二,所述支撑板设置在货仓上方。
19、本实用新型具有如下有益效果:
20、所述货仓设置在机械手臂一与机械手臂二上方,所述货仓设置在固定块二下方,所述固定块二位于支撑板内侧壁前部。
21、本实用新型具有如下有益效果:
22、1、本实用通过,当间隔棒开始进行安装的时候,这时候机械手臂二将固定在线缆上的间隔棒进行拆卸,同时机械手臂一将会对拆卸的间隔棒进行固定,防止在进行拆卸的时候出现掉落的现象,随后在进行安装的时候,机械手臂一将会通过转动杆一与固定台一的配合,使其机械手臂一与机械手臂二能够进行旋转运动,随后通过固定杆与液压缸的配合,使其装置在进行能够为其机械手臂一与机械手臂二提供动力,采用多个机械手臂与存储的货仓使其能够及时地及时地更换线绳上的间隔棒,减少了需要人员通过人力对其进行安装,同时使用不同机械手臂进行分类安装间隔棒的需求。
23、2、本实用通过,在安装一个间隔棒后,人员便可以通过观察器看出间隔棒是否安装完毕,随后固定在固定台二上的支持柱二将会通过滑动轮二的带动下能够通过线绳进行滑动,同时在滑动的时候,通过固定在固定台二与固定板上的支撑柱一能够同时带动支撑板进行滑动,并且在固定台二通过滑动轮二进行滑动的时候,位于支撑板内侧两端的滑动轮一将会进行滑动,随后也将会带动支撑板一进行滑动,减少了使用单一的滑动轮滑动的时候,无法跨过间隔棒,同时将会通过多个滑动轮能够使其安装的时候更加方便。
技术实现思路
技术特征:
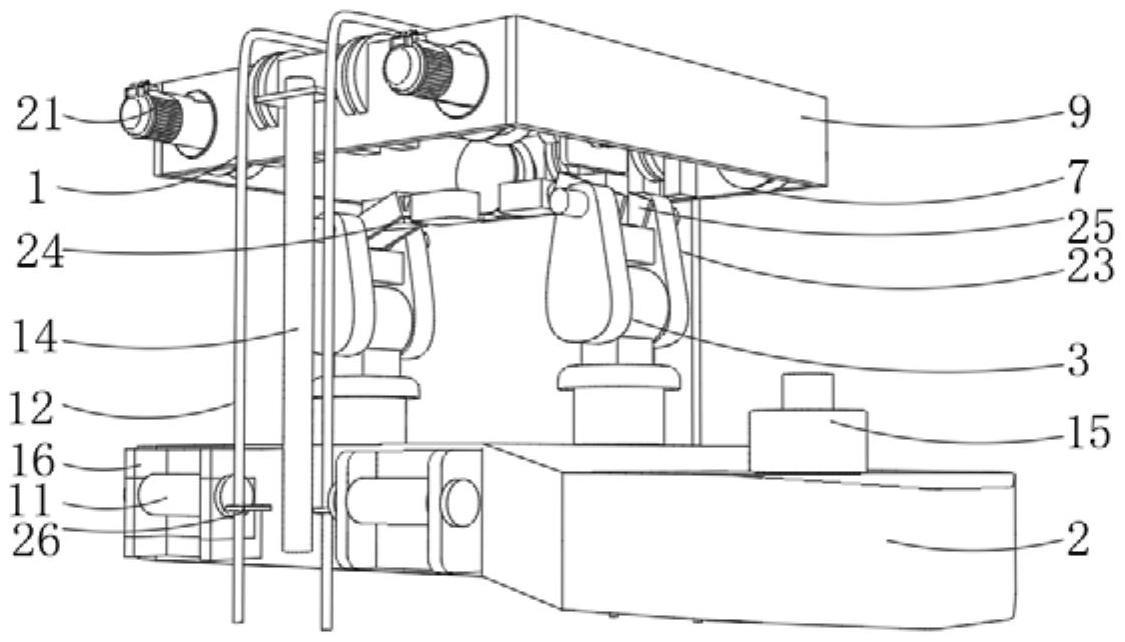
1.一种新型间隔棒安装机器人,包括吊装机构(1)支撑结构(2)与执行机械手臂机构(3),其特征在于:所述吊装机构(1)底部设置有支撑结构(2),所述吊装机构(1)底部设置有执行机械手臂机构(3),所述支撑结构(2)设置在执行机械手臂机构(3)中下部;
2.根据权利要求1所述的一种新型间隔棒安装机器人,其特征在于:所述吊装机构(1)包括转动杆一(10)、支撑板(9)、固定块二(30)、固定绳(12)、电机二(21)、安装块(28)、固定板(13)、支撑柱一(14)、滑动轮一(7)、滑动轮三(29)与联接柱(6),所述支撑板(9)左右相对一侧均设置有滑动轮一(7),所述滑动轮一(7)左右相对一侧均固定连接有电机二(21),所述支撑板(9)上端中部设置有多个固定绳(12),所述固定绳(12)下端中部设置有滑动轮三(29),所述滑动轮三(29)前后相对一侧均转动连接有安装块(28),所述支撑板(9)左右相对一侧中部均设置有固定板(13),所述滑动轮一(7)前后相对一侧均设置有转动杆一(10),所述转动杆一(10)下端中部固定连接有安装块(28),所述转动杆一(10)左右相对一侧设置有电机一(20),所述电机一(20)后侧中部固定连接有固定块二(30),所述固定块二(30)后侧中部固定连接有联接柱(6),所述电机一(20)前侧中部固定连接有支撑板(9)。
3.根据权利要求1所述的一种新型间隔棒安装机器人,其特征在于:所述支撑结构(2)包括观察器(15)、夹持槽(16)、货仓(4)、转动杆二(11)、支撑柱一(14)、支撑柱二(22)、固定台二(19)与绳孔(26),所述固定台二(19)上端左侧固定连接有观察器(15),所述固定台二(19)前后相对一侧均固定连接有夹持槽(16),所述夹持槽(16)左右相靠近一侧中部均固定连接有转动杆二(11),所述转动杆二(11)左右相靠近一侧均设置有绳孔(26),所述绳孔(26)相对一侧设置有支撑柱一(14),所述支撑柱一(14)前后相对一侧均固定连接有固定台二(19),所述固定台二(19)内侧壁右侧设置有货仓(4),所述固定台二(19)前后相对一侧中部均设置有支撑柱二(22)。
4.根据权利要求3所述的一种新型间隔棒安装机器人,其特征在于:所述支撑柱二(22)贯穿转动杆二(11)并处于转动杆二(11)下端,所述转动杆二(11)设置在支撑板(9)下方,所述支撑板(9)下端设置有滑动轮二(8),所述滑动轮二(8)下端中部固定连接有支撑柱二(22)。
5.根据权利要求1所述的一种新型间隔棒安装机器人,其特征在于:所述液压缸(5)设置在固定台一(27)下方,所述液压缸(5)下端中部固定连接有固定台二(19),所述固定台二(19)设置在支撑板(9)下方。
6.根据权利要求2所述的一种新型间隔棒安装机器人,其特征在于:所述固定绳(12)输出端固定连接在绳孔(26)输入端处,所述绳孔(26)设置在支撑板(9)下方。
7.根据权利要求2所述的一种新型间隔棒安装机器人,其特征在于:所述支撑板(9)下端中部设置有机械手臂一(23)与机械手臂二(24),所述支撑板(9)设置在货仓(4)上方。
8.根据权利要求3所述的一种新型间隔棒安装机器人,其特征在于:所述货仓(4)设置在机械手臂一(23)与机械手臂二(24)上方,所述货仓(4) 设置在固定块二(30)下方,所述固定块二(30)位于支撑板(9)内侧壁前部。
技术总结
本技术涉及间隔棒安装技术领域,公开一种新型间隔棒安装机器人,包括吊装机构支撑结构与执行机械手臂机构,所述吊装机构底部设置有支撑结构,所述吊装机构底部设置有执行机械手臂机构,所述支撑结构设置在执行机械手臂机构中下部,所述执行机械手臂机构包括机械手臂二、机械手臂一、转动杆一、固定台一、固定杆、固定块一、液压缸与转动柱,所述机械手臂二左端中部设置有机械手臂一,所述机械手臂一下端中部转动连接有转动杆一。本技术中,通过采用多个机械手臂与存储的货仓使其能够及时地更换线绳上的间隔棒,减少了需要人员通过人力对其进行安装,同时使用不同机械手臂进行分类安装间隔棒的需求。
技术研发人员:娄强,徐军,盛成进,王晓燕,罗朝恩,张永华,唐晓妍,许军军
受保护的技术使用者:贵州送变电有限责任公司
技术研发日:20221104
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!