一种工业机器人复合夹具的制作方法
本技术涉及复合夹具,尤其涉及一种工业机器人复合夹具。
背景技术:
1、随着科技的发展,工业机器人自动化生产线成套设备已成为自动化装备的主流,在铸造行业、电子行业、机械行业等行业领域被广泛使用,其机器人在使用的过程中,需要具有夹具对工件进行夹紧固定,便于对工件进行操作以及移动。
2、现有的工业机器人复合夹具,为了将物件抓起的稳定,会在夹具臂的底部设置一个固定的类似托钩的物件,最后通过工业机器人的搬移将物件运到指定区域后会进行放下,但是在放下物件的过程中托钩会阻挡其物件,从而使得物件会卡在上面,难以下料,影响其工作效率。
技术实现思路
1、针对现有技术中对于存在的上述问题,现提供一种工业机器人复合夹具。
2、具体技术方案如下:
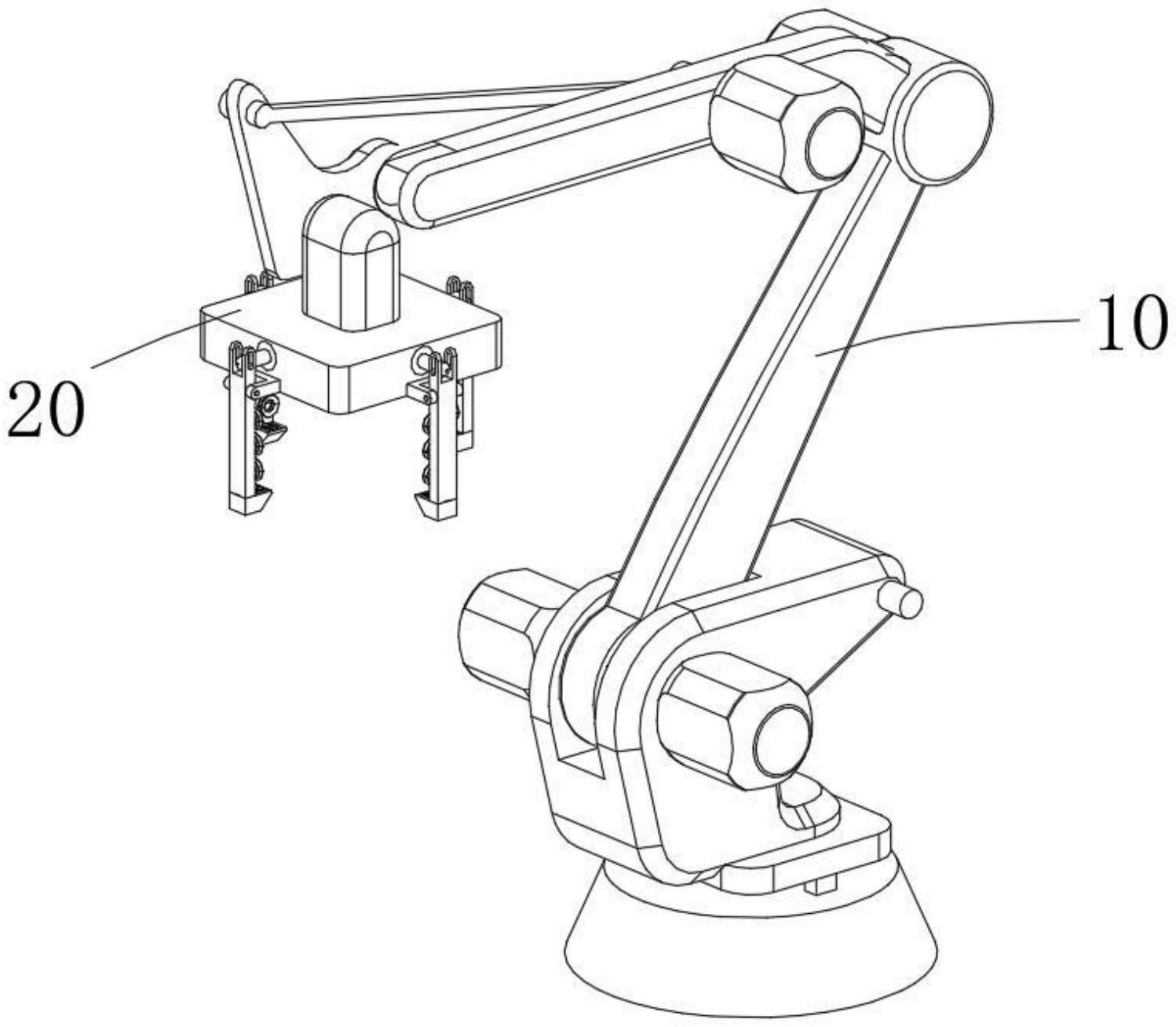
3、设计一种工业机器人复合夹具,包括机器人主体,夹具底座,电液压件和夹具臂,所述的机器人主体输出端设有夹具底座,所述夹具底座的上方设有固定连接的供电组件,所述供电组件活动连接所述机器人主体,所述夹具底座的内部设有电液压件,所述电液压件的外部设有衔接件,所述衔接件固定连接所述夹具底座的外部,所述衔接件的内部设有贯穿固定连接的插杆,所述插杆贯穿活动连接所述夹具臂,所述夹具臂均匀分布在所述夹具底座的外部。
4、优选的,所述电液压件的输出端设有固定连接的伸缩杆,所述夹具臂的顶端开设有通槽,所述伸缩杆远离所述电液压件的一端活动连接所述通槽。
5、优选的,所述夹具臂的内部设有活动连接的联动齿轮,所述联动齿轮啮合连接所述插杆,所述联动齿轮位于所述插杆的下方。
6、优选的,所述联动齿轮的两侧设有啮合连接的传动杆,所述传动杆远离所述联动齿轮的一端设有啮合连接的传动齿轮。
7、优选的,所述夹具臂的底部设有托体,所述托体的上方设有嵌入固定连接的齿条,所述齿条的两侧开设有滑槽。
8、优选的,所述夹具臂的底部设有固定连接的滑动件,所述滑动件位于所述滑槽的内部。
9、优选的,所述齿条的上方啮合连接所述传动齿轮,所述传动齿轮活动连接所述夹具臂的内部。
10、上述技术方案具有如下优点或有益效果:
11、通过设置的机器人主体,夹具底座,电液压件和夹具臂,因为机器人主体为常见的工业机器人运作后会使得其输出端夹具底座及其物件进行移动,以便对待移动物件进行搬移,又因为夹具底座的顶部上固定连接的供电组件,且供电组件通过电线连接外部,其另一端通过电线连接夹具底座内部的电液压件对其进行统一供电运行,因为电液压件的输出端设置有伸缩杆,所以使得电液压件运作时会使得伸缩杆进行伸缩运动,又因为伸缩杆的一端通过插销活动连接在夹具臂顶部开设的通槽的内部,再配合设置的衔接件,衔接件是固定连接在夹具底座的四边上,且在衔接件内部设有贯穿固定连接的插杆,插杆又贯穿活动连接了夹具臂,所以在电液压件运作后使得伸缩杆向伸出从而推动夹具臂的一端以插杆为中心旋转一定角度,在又因为插杆上面设有固定连接的齿轮,且和夹具臂内部活动连接的联动齿轮啮合连接,从而使得夹具臂以插杆为中心旋转的过程中会使得联动齿轮进行旋转,又因为联动齿轮的两侧设有固定连接的伞齿轮,传动杆两端也设有对应的伞齿轮,所以使得联动齿轮旋转时会带动两边啮合连接的传动杆旋转,又因为传动杆的底端啮合连接了传动齿轮的两端,且传动齿轮是活动连接在夹具臂的内部的,又因为传动齿轮下方啮合连接齿条,且齿条嵌入固定连接在托体的顶部,从而使得传动齿轮旋转时会使得齿条连带着托体左右滑动给予动力,又因为托体的上方传动齿轮的两侧开设有滑槽,滑槽的内部设有滑动件,且滑动件固定连接在夹具臂的底部,从而使得托体及其物件被传动齿轮驱动和滑槽配合滑动件的限定范围内部滑动,最终使得电液压件运作推动夹具臂围绕插杆旋转时会使得夹具臂底部活动连接的托体也向着的对应方向滑动从而托钩起待移动物件,在机器人主体的运作使得夹具底座位于到对应位置后,电液压件缩回伸缩杆,从而使得多个夹具臂以插杆为中心反向旋转后,从而使得托体向反方向滑动使得放下待移动物件,进而使得放下物料时更加快速便捷,提高了工作效率。
技术特征:
1.一种工业机器人复合夹具,其特征在于:包括机器人主体(10),夹具底座(20),电液压件(30)和夹具臂(40),所述的机器人主体(10)输出端设有夹具底座(20),所述夹具底座(20)的上方设有固定连接的供电组件(21),所述供电组件(21)活动连接所述机器人主体(10),所述夹具底座(20)的内部设有电液压件(30),所述电液压件(30)的外部设有衔接件(32),所述衔接件(32)固定连接所述夹具底座(20)的外部,所述衔接件(32)的内部设有贯穿固定连接的插杆(33),所述插杆(33)贯穿活动连接所述夹具臂(40),所述夹具臂(40)均匀分布在所述夹具底座(20)的外部。
2.根据权利要求1所述的一种工业机器人复合夹具,其特征在于:所述电液压件(30)的输出端设有固定连接的伸缩杆(31),所述夹具臂(40)的顶端开设有通槽(41),所述伸缩杆(31)远离所述电液压件(30)的一端活动连接所述通槽(41)。
3.根据权利要求1所述的一种工业机器人复合夹具,其特征在于:所述夹具臂(40)的内部设有活动连接的联动齿轮(43),所述联动齿轮(43)啮合连接所述插杆(33),所述联动齿轮(43)位于所述插杆(33)的下方。
4.根据权利要求3所述的一种工业机器人复合夹具,其特征在于:所述联动齿轮(43)的两侧设有啮合连接的传动杆(44),所述传动杆(44)远离所述联动齿轮(43)的一端设有啮合连接的传动齿轮(45)。
5.根据权利要求4所述的一种工业机器人复合夹具,其特征在于:所述夹具臂(40)的底部设有托体(46),所述托体(46)的上方设有嵌入固定连接的齿条(47),所述齿条(47)的两侧开设有滑槽(48)。
6.根据权利要求5所述的一种工业机器人复合夹具,其特征在于:所述夹具臂(40)的底部设有固定连接的滑动件(42),所述滑动件(42)位于所述滑槽(48)的内部。
7.根据权利要求6所述的一种工业机器人复合夹具,其特征在于:所述齿条(47)的上方啮合连接所述传动齿轮(45),所述传动齿轮(45)活动连接所述夹具臂(40)的内部。
技术总结
本技术涉及复合夹具技术领域,尤其是一种工业机器人复合夹具,包括机器人主体,夹具底座,电液压件和夹具臂,所述的机器人主体输出端设有夹具底座,所述衔接件的内部设有贯穿固定连接的插杆,所述插杆贯穿活动连接所述夹具臂,所述夹具臂均匀分布在所述夹具底座的外部;最终使得电液压件运作推动夹具臂围绕插杆旋转时会使得夹具臂底部活动连接的托体也向着的对应方向滑动从而托钩起待移动物件,在机器人主体的运作使得夹具底座位于到对应位置后,电液压件缩回伸缩杆,从而使得多个夹具臂以插杆为中心反向旋转后,从而使得托体向反方向滑动使得放下待移动物件,进而使得放下物料时更加快速便捷,提高了工作效率。
技术研发人员:朱玮,胡赵,祝树青
受保护的技术使用者:杭州秉创自动化科技有限公司
技术研发日:20221108
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!