换电站自动作业机器人的制作方法
本技术涉及机器人,尤其涉及一种换电站自动作业机器人。
背景技术:
1、随着电动车辆技术的发展,各类电车的应用越发广泛。相应的,更换电车中的电池的换电站也在不断的更新换代,从曾经的人力更换电池逐渐发展为通过机器人更换电池,换电方式越发方便快捷。
2、相关技术中,换电站的作业机器人仅是具备一般的换电池作业功能,在更换电池时,仅是按照设定的路线运行至电车处进行更换电池的操作。然而,在实际应用中,由于商用电车等类型的电车的电池体积较大,在机器人安装运作过程中周围存在障碍物时,可能存在伤人损物的安全隐患,且无法保证机器人自身的安全性。
技术实现思路
1、本实用新型旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本实用新型的目的在于提出一种换电站自动作业机器人,该机器人具有预警系统,在作业过程中能够自动确定异常等级并执行相应的预警措施,具有较高的安全性。
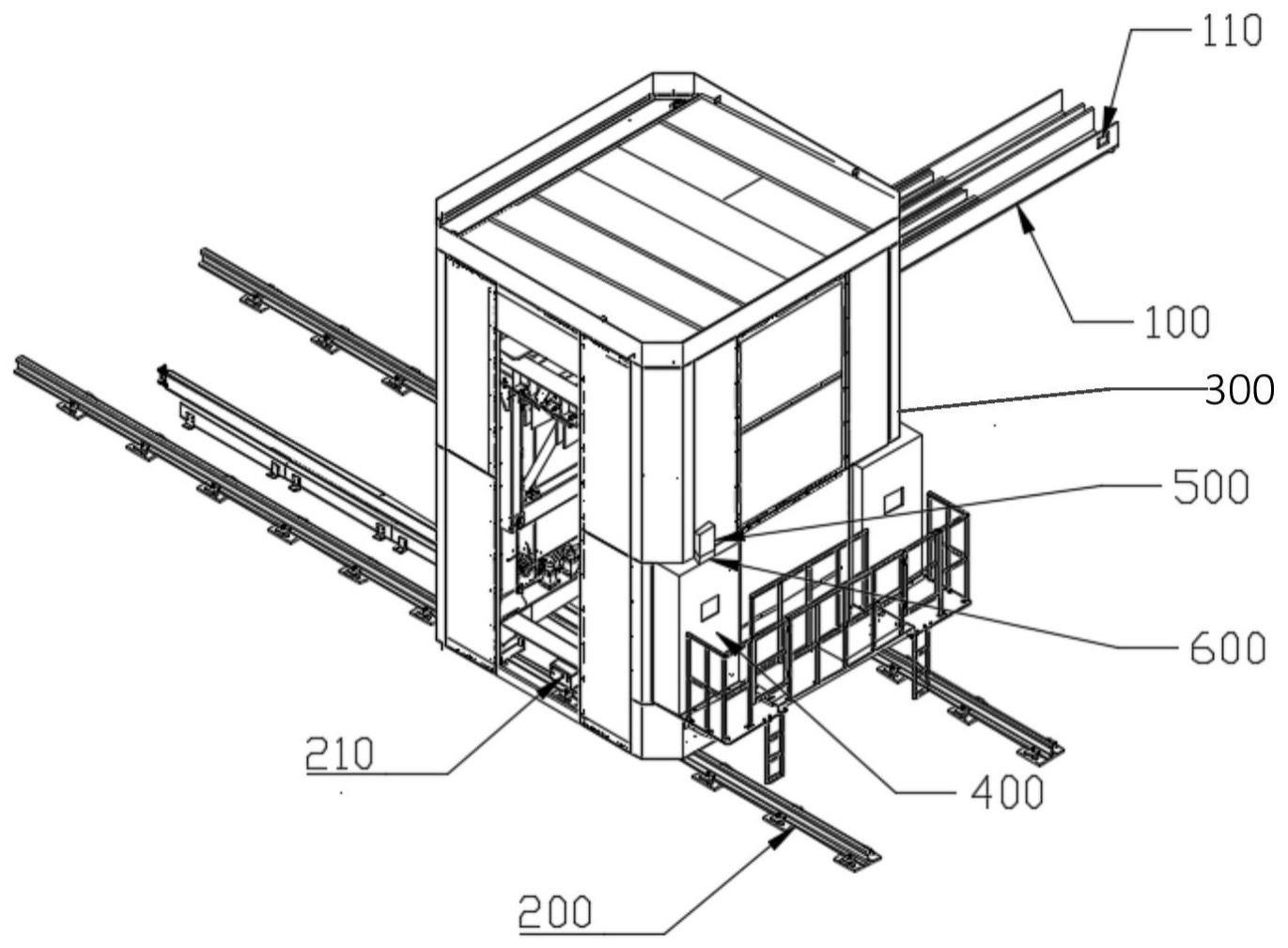
3、为达上述目的,本实用新型的在于提出一种换电站自动作业机器人,包括:x向控制模块、y向控制模块、z向控制模块、x向预警模块、y向预警模块和z向预警模块、处理模块和警示模块,其中,
4、所述y向控制模块水平放置在地面上,所述y向预警模块设置在所述y向控制模块的底部;
5、所述z向控制模块固定安装在所述y向控制模块的顶部,所述z向预警模块固定安全在所述z向控制模块的底部;
6、所述x向控制模块活动安装在所述z向控制模块的内部,所述x向预警模块固定安全在所述x向控制模块的底部;
7、所述处理模块固定安装在所述z向控制模块的任一侧面上;
8、所述警示模块安装在所述处理模块的上方。
9、可选地,在本实用新型的一个实施例中,y向预警模块包括:多个第一距离传感器、多个第二距离传感器和多个第一红外传感器,其中,所述多个第一距离传感器对称安装在所述y向控制模块的移动端;所述多个第二距离传感器固定安装在所述y向控制模块底部移动方向的两侧;所述多个第一红外传感器安装在所述y向控制模块底部的周缘。
10、可选地,在本实用新型的一个实施例中,x向预警模块包括:多个第三距离传感器和多个第二红外传感器,其中,所述多个第三距离传感器固定安装在所述x向控制模块的底部沿x轴方向上;所述多个第二红外传感器固定安装在所述x向控制模块底部的周缘。
11、可选地,在本实用新型的一个实施例中,z向预警模块包括:多个第四距离传感器和多个第三红外传感器,其中,所述多个第四距离传感器固定安装在所述z向控制模块内部的底部沿z轴方向上;所述多个第二红外传感器固定安装在所述z向控制模块内部的底部的周缘。
12、可选地,在本实用新型的一个实施例中,处理模块,包括:信息采集单元、信息传输单元、信息整理单元、信息存储单元、信息分析单元、指令生成单元和信息反馈单元,其中,所述信息采集单元的输出端与所述信息传输单元的第一输入端连接,所述第一输入端用于接收传感器采集的所述机器人的运行参数;所述信息传输单元的输出端与所述信息整理单元的输入端连接;所述信息整理单元的输出端与所述信息分析单元的输入端连接;所述信息分析单元的输出端与所述指令生成单元的输入端连接;所述指令生成单元的第一输出端与所述信息传输单元的第二输入端连接,所述第二输入端用于接收所述指令生成单元的生成的预警指令,所述指令生成单元的第二输出端与所述信息反馈单元的输入端连接。
13、可选地,在本实用新型的一个实施例中,所述处理模块,还包括:日志生成单元,所述日志生成单元的输入端与所述信息反馈单元的输出端连接,所述日志生成单元的输出端与所述信息存储单元的输入端连接。
14、可选地,在本实用新型的一个实施例中,所述y向预警模块、所述x向预警模块和所述z向预警模块与所述处理模块电性连接。
15、可选地,在本实用新型的一个实施例中,警示模块包括:警示灯和警示喇叭,其中,所述警示喇叭固定安装在所述处理模块顶部的上方;所述警示灯的底部固定安装在所述警示喇叭顶部的上方。
16、可选地,在本实用新型的一个实施例中,警示灯为红黄绿三色指示灯,所述警示灯根据接收到的预警指令显示不同的颜色;所述警示喇叭根据接收到的预警指令播放不同节奏的警报声。
17、可选地,在本实用新型的一个实施例中,换电站自动作业机器人的反应距离为一米,所述换电站自动作业机器人的警示距离为两米,其中,所述反应距离是所述换电站自动作业机器人在异常状态下进行反映操作所需的安全距离,所述警示距离是对所述换电站自动作业机器人的运作即将存在影响的距离。
18、本实用新型的实施例提供的技术方案至少带来以下有益效果:本实用新型的机器人能够检测多个控制模块移动方向上与障碍物之间的距离和障碍物发出的红外信号,结合机器人自身的运行状况与检测出的距离信号和红外信号等多种因素判定机器人的异常等级。再对不同的异常等级执行相应的预警方案,提高了排除机器人的异常的处理能力,在尽量保证机器人的作业任务的基础上,提高了机器人运行的安全性并保证机器人周围的人员和物品的安全。并且,该机器人能够针对不同的异常等级进行不同的警示方式提醒相关的工作人员,便于工作人员快速和准确的确定机器人的异常状态,能够为工作人员节省出更多的思考处理的时间,便于工作人员迅速做出相关运维措施,提高员工针对机器人异常状态的修复效率。同时可以警示工作人员,使工作人员保持警惕,保证工作人员的安全性。
19、本实用新型附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种换电站自动作业机器人,其特征在于,包括:x向控制模块、y向控制模块、z向控制模块、x向预警模块、y向预警模块和z向预警模块、处理模块和警示模块,其中,
2.根据权利要求1所述的换电站自动作业机器人,其特征在于,所述y向预警模块包括:多个第一距离传感器、多个第二距离传感器和多个第一红外传感器,其中,
3.根据权利要求1所述的换电站自动作业机器人,其特征在于,所述x向预警模块包括:多个第三距离传感器和多个第二红外传感器,其中,
4.根据权利要求1所述的换电站自动作业机器人,其特征在于,所述z向预警模块包括:多个第四距离传感器和多个第三红外传感器,其中,
5.根据权利要求1所述的换电站自动作业机器人,其特征在于,所述处理模块,包括:信息采集单元、信息传输单元、信息整理单元、信息存储单元、信息分析单元、指令生成单元和信息反馈单元,其中,
6.根据权利要求5所述的换电站自动作业机器人,其特征在于,所述处理模块,还包括:
7.根据权利要求1所述的换电站自动作业机器人,其特征在于,所述y向预警模块、所述x向预警模块和所述z向预警模块与所述处理模块电性连接。
8.根据权利要求1所述的换电站自动作业机器人,其特征在于,所述警示模块包括:警示灯和警示喇叭,其中,
9.根据权利要求8所述的换电站自动作业机器人,其特征在于,所述警示灯为红黄绿三色指示灯,所述警示灯根据接收到的预警指令显示不同的颜色;
10.根据权利要求1所述的换电站自动作业机器人,其特征在于,所述换电站自动作业机器人的反应距离为一米,所述换电站自动作业机器人的警示距离为两米,其中,所述反应距离是所述换电站自动作业机器人在异常状态下进行反映操作所需的安全距离,所述警示距离是对所述换电站自动作业机器人的运作即将存在影响的距离。
技术总结
本技术提出了一种换电站自动作业机器人,该机器人包括:Y向控制模块水平放置在地面上,Y向预警模块设置在Y向控制模块的底部;Z向控制模块固定安装在Y向控制模块的顶部,Z向预警模块固定安全在Z向控制模块的底部;X向控制模块活动安装在Z向控制模块的内部,X向预警模块固定安全在X向控制模块的底部;处理模块固定安装在Z向控制模块的任一侧面上;警示模块安装在处理模块的上方。该机器人具有预警系统,在作业过程中能够自动确定异常等级并执行相应的预警措施,具有较高的安全性。
技术研发人员:马满堂,刘大为,李昊,刘明义,姚帅,周科,朱连峻,李卫东,任立兵,张斌,曹传钊,裴杰
受保护的技术使用者:中国华能集团清洁能源技术研究院有限公司
技术研发日:20221111
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!