一种新型机械手移动定位装置的制作方法
本技术涉及机械,具体为一种新型机械手移动定位装置。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
2、机械手在工作时,需要对其进行精准定位,而现有的定位装置仅能单独的对机械手进行直线运动或转动时的定位,同时当机械手的行程较大时,定位不方便。
技术实现思路
1、本实用新型的目的在于提供一种新型机械手移动定位装置,以解决上述背景技术中提出的问题。
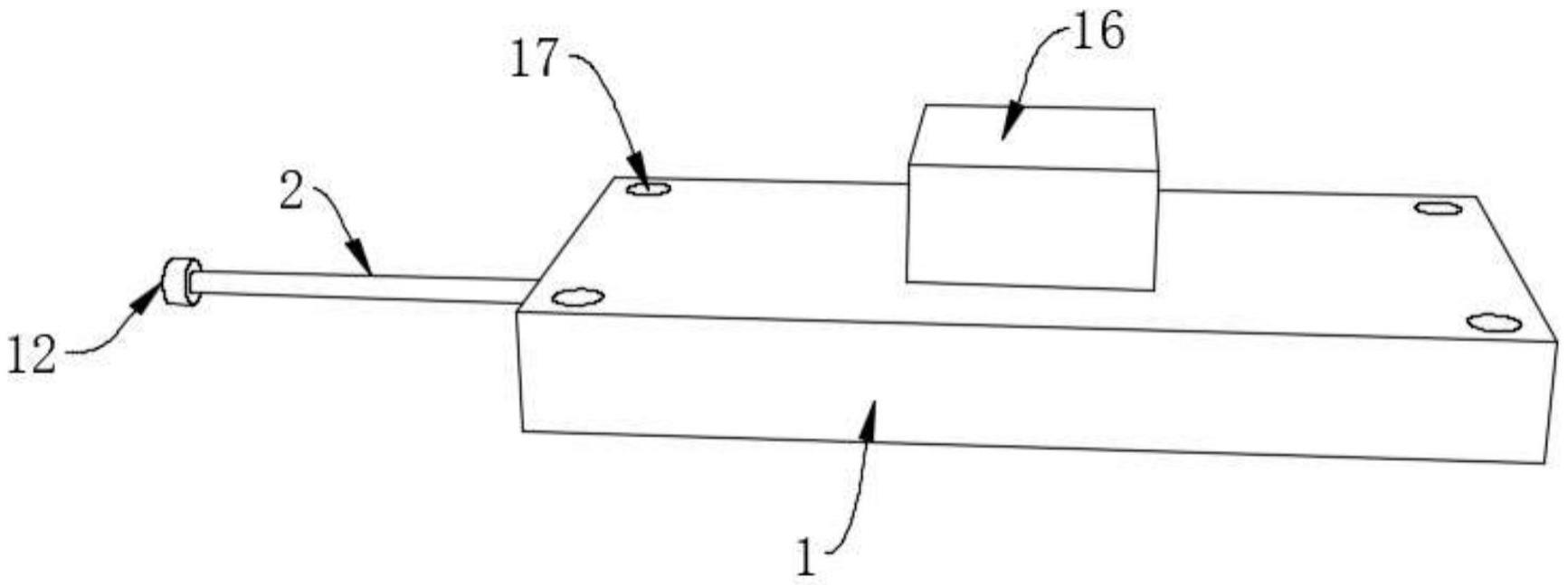
2、为实现上述目的,本实用新型提供如下技术方案:一种新型机械手移动定位装置,包括主体以及连接拉绳、设置在主体上端的控制盒,所述主体的内部开设有安装空腔,所述主体在安装空腔的中心处设置有收卷机构以及检测机构,所述检测机构包括固定架、第一转轴、第二转轴,所述第一转轴、第二转轴的外侧分别设置有第一滚筒、第二滚筒,所述第一转轴的端处安装有与控制盒连接的角度传感器,所述主体的一端端面开设有与安装空腔连通的通孔,所述连接拉绳整体缠绕在所述收卷机构的外侧,所述连接拉绳的一端在经过检测机构后,从通孔延伸至主体的外部。
3、优选的,所述收卷机构包括第三转轴以及用于收卷连接拉绳的收卷盘构成,所述第三转轴垂直设置在所述安装空腔的中心处,所述收卷盘整体通过中心孔套设在所述第三转轴的外侧。
4、优选的,所述第三转轴的下端与所述安装空腔内侧下端的发条连接。
5、优选的,所述连接拉绳的端处设置有限位件。
6、优选的,所述第一滚筒、第二滚筒与所述通孔的轴线距离相等。
7、优选的,所述安装空腔的内部设置有固定杆,所述固定杆的上端设置有与通孔处于同一水平面的导轮,所述导轮的外壁与所述连接拉绳抵接。
8、与现有技术相比,本实用新型的有益效果是:
9、1、通过在主体的内部设置收卷机构以及检测机构,将连接拉绳整体缠绕在收卷机构的外侧,并将连接拉绳的一端贯穿检测机构的第一滚筒、第二滚筒,最终与机械手的滑座连接,从而在使用过程中,通过检测第一转轴转动的角度,不仅可用于机械手直线运动的定位,同时还可用于机械手转动时的定位;
10、2、通过将机械手下端的滑座与主体通过连接拉绳连接,从而在使用时,可适用于行程较大的机械手定位,整体结构简单,安装方便快捷,无需对现有的机械手及其驱动机构进行改进。
技术特征:
1.一种新型机械手移动定位装置,其特征在于,包括主体(1)以及连接拉绳(2)、设置在主体(1)上端的控制盒(16),所述主体(1)的内部开设有安装空腔(3),所述主体(1)在安装空腔(3)的中心处设置有收卷机构以及检测机构,所述检测机构包括固定架(4)、第一转轴(5)、第二转轴(6),所述第一转轴(5)、第二转轴(6)的外侧分别设置有第一滚筒(7)、第二滚筒(8),所述第一转轴(5)的端处安装有与控制盒(16)连接的角度传感器,所述主体(1)的一端端面开设有与安装空腔(3)连通的通孔(9),所述连接拉绳(2)整体缠绕在所述收卷机构的外侧,所述连接拉绳(2)的一端在经过检测机构后,从通孔(9)延伸至主体(1)的外部。
2.根据权利要求1所述的一种新型机械手移动定位装置,其特征在于:所述收卷机构包括第三转轴(10)以及用于收卷连接拉绳(2)的收卷盘(11)构成,所述第三转轴(10)垂直设置在所述安装空腔(3)的中心处,所述收卷盘(11)整体通过中心孔套设在所述第三转轴(10)的外侧。
3.根据权利要求2所述的一种新型机械手移动定位装置,其特征在于:所述第三转轴(10)的下端与所述安装空腔(3)内侧下端的发条连接。
4.根据权利要求1所述的一种新型机械手移动定位装置,其特征在于:所述连接拉绳(2)的端处设置有限位件(12)。
5.根据权利要求1所述的一种新型机械手移动定位装置,其特征在于:所述第一滚筒(7)、第二滚筒(8)与所述通孔(9)的轴线距离相等。
6.根据权利要求1所述的一种新型机械手移动定位装置,其特征在于:所述安装空腔(3)的内部设置有固定杆(13),所述固定杆(13)的上端设置有与通孔(9)处于同一水平面的导轮(14),所述导轮(14)的外壁与所述连接拉绳(2)抵接。
技术总结
本技术公开了一种新型机械手移动定位装置,包括主体以及连接拉绳、设置在主体上端的控制盒,所述主体的内部开设有安装空腔,所述主体在安装空腔的中心处设置有收卷机构以及检测机构,所述检测机构包括固定架、第一转轴、第二转轴,所述第一转轴、第二转轴的外侧分别设置有第一滚筒、第二滚筒,所述第一转轴的端处安装有与控制盒连接的角度传感器,所述主体的一端端面开设有与安装空腔连通的通孔,所述连接拉绳整体缠绕在所述收卷机构的外侧,所述连接拉绳的一端在经过检测机构后,从通孔延伸至主体的外部,本技术的有益效果是:通过检测第一转轴转动的角度,不仅可用于机械手直线运动的定位,同时还可用于机械手转动时的定位。
技术研发人员:高琪,余叶明
受保护的技术使用者:武汉泓创科技有限公司
技术研发日:20221111
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!