一种巡检用的智能机器人的制作方法
本技术涉及机器人,具体为一种巡检用的智能机器人。
背景技术:
1、巡检机器人基于ocr和图像识别能力,能模拟专业的人工操作,在全站多级页面与资金交易全流程的各个场景进行点击、识别、检查等巡检操作,可以实现app页面自动化巡检监控,7x24小时不间断检查app交易、营销活动、账户安全等核心功能流程。前置发现和快速定位app内的各类问题,多角度地守卫用户的资金与交易安全,提升消费者体验,现有的巡检用智能机器人在移动过程中一旦发生碰撞容易造成其内部精密零部件损坏。
技术实现思路
1、本实用新型的目的是提供一种巡检用的智能机器人,解决了现有的巡检用智能机器人在移动过程中一旦发生碰撞容易造成其内部精密零部件损坏的问题。
2、技术方案
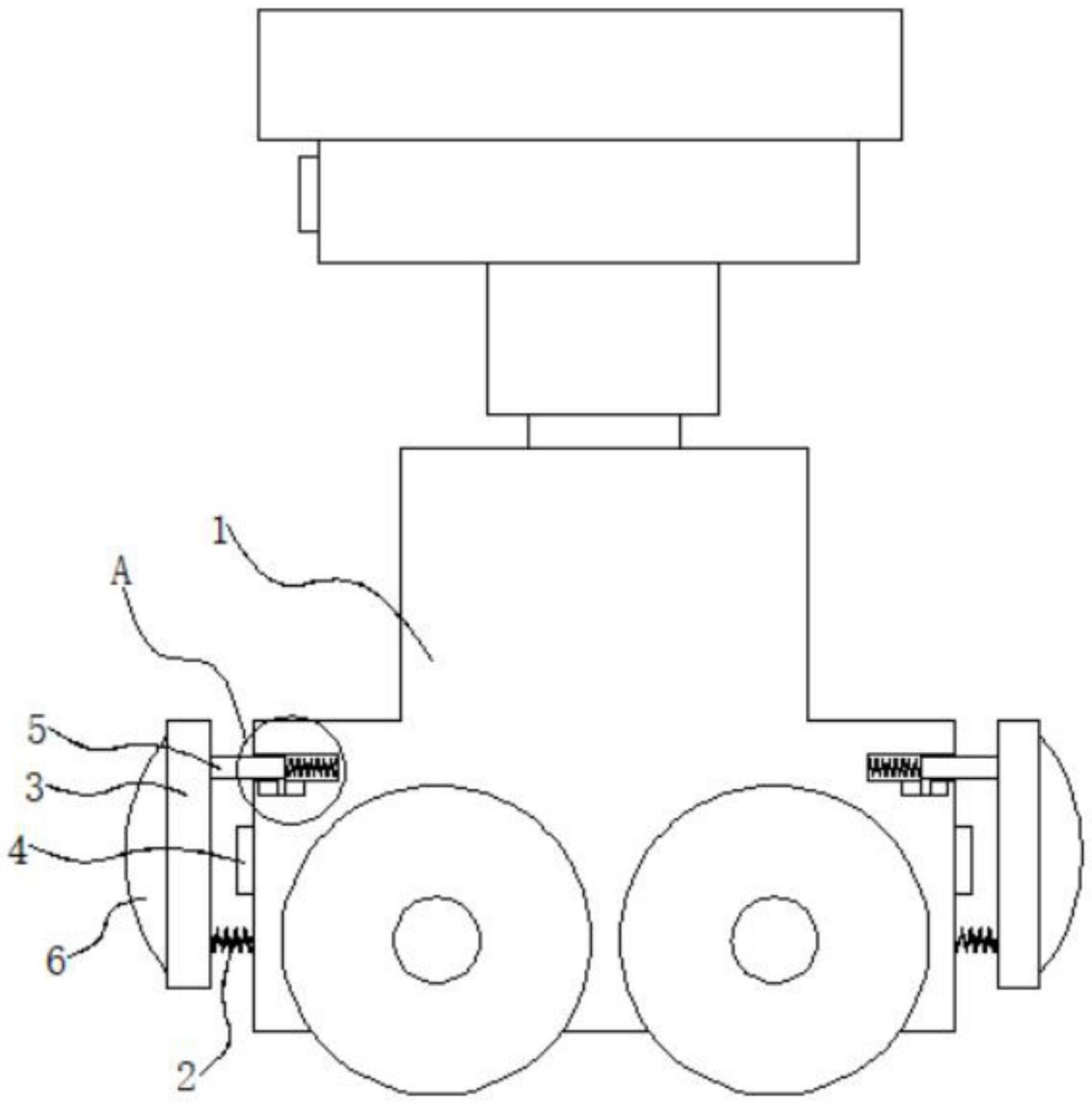
3、为实现以上目的,本实用新型通过以下技术方案予以实现:一种巡检用的智能机器人,包括机体,所述机体的左侧固定连接有第一弹簧,所述第一弹簧的左端固定连接有缓冲板,所述缓冲板的左侧固定连接有橡胶垫,所述机体的左侧开设有缓冲槽,所述缓冲槽的内壁固定连接有第二弹簧,所述第二弹簧的左端固定连接有挤压杆,所述挤压杆的左端与缓冲板的右侧固定连接。
4、进一步的,所述缓冲槽的内底壁开设有限位槽,所述限位槽的内部活动连接有移动杆,所述移动杆的顶端与挤压杆的下表面固定连接。
5、进一步的,所述机体的左右两侧均固定连接有橡胶板。
6、进一步的,所述缓冲板的数量为两个,两个缓冲板以机体的中轴线对称设置。
7、本实用新型提供了一种巡检用的智能机器人。具备以下有益效果:
8、该巡检用的智能机器人,通过第一弹簧、缓冲板、橡胶板、挤压杆、橡胶垫、缓冲槽、第二弹簧、限位槽和移动杆之间的相互配合,达到可以对于机体前进和后退方向提供防护能力,避免撞击导致机器人损坏,解决了现有的巡检用智能机器人在移动过程中一旦发生碰撞容易造成其内部精密零部件损坏的问题。
技术特征:
1.一种巡检用的智能机器人,包括机体(1),其特征在于:所述机体(1)的左侧固定连接有第一弹簧(2),所述第一弹簧(2)的左端固定连接有缓冲板(3),所述缓冲板(3)的左侧固定连接有橡胶垫(6),所述机体(1)的左侧开设有缓冲槽(7),所述缓冲槽(7)的内壁固定连接有第二弹簧(8),所述第二弹簧(8)的左端固定连接有挤压杆(5),所述挤压杆(5)的左端与缓冲板(3)的右侧固定连接。
2.根据权利要求1所述的一种巡检用的智能机器人,其特征在于:所述缓冲槽(7)的内底壁开设有限位槽(9),所述限位槽(9)的内部活动连接有移动杆(10),所述移动杆(10)的顶端与挤压杆(5)的下表面固定连接。
3.根据权利要求1所述的一种巡检用的智能机器人,其特征在于:所述机体(1)的左右两侧均固定连接有橡胶板(4)。
4.根据权利要求1所述的一种巡检用的智能机器人,其特征在于:所述缓冲板(3)的数量为两个,两个缓冲板(3)以机体(1)的中轴线对称设置。
技术总结
本技术提供一种巡检用的智能机器人,涉及机器人领域。该巡检用的智能机器人,包括机体,所述机体的左侧固定连接有第一弹簧,所述第一弹簧的左端固定连接有缓冲板,所述缓冲板的左侧固定连接有橡胶垫,所述机体的左侧开设有缓冲槽,所述缓冲槽的内壁固定连接有第二弹簧,所述第二弹簧的左端固定连接有挤压杆。该巡检用的智能机器人,通过第一弹簧、缓冲板、橡胶板、挤压杆、橡胶垫、缓冲槽、第二弹簧、限位槽和移动杆之间的相互配合,达到可以对于机体前进和后退方向提供防护能力,避免撞击导致机器人损坏,解决了现有的巡检用智能机器人在移动过程中一旦发生碰撞容易造成其内部精密零部件损坏的问题。
技术研发人员:张意
受保护的技术使用者:常州市卓晓数字技术有限公司
技术研发日:20221116
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!