一种线路断股维修机器人用夹爪的制作方法
本技术涉及线路断股维修设备领域,具体涉及一种线路断股维修机器人用夹爪。
背景技术:
1、输电线路导地线的断股故障在运维过程中频发,受覆冰、极端天气、震动、雷击等因素影响,当导线拉伸应力超出机械强度时,结构裂纹扩展导致塑性变形和疲劳颈缩断裂,雷击时大电流所产生的高温亦会迅速熔断薄弱点导致断裂,有的断股线缆会搭在相邻的线缆上造成短路,由于抢修难度大、停电时间长,给输电线路安全运行带来了极大的危害,随着技术发展,维修机器人逐渐代替了人工维修,降低了风险提高修复效率。
2、但是现有的维修机器人对于断股线缆会搭在相邻的线缆上的断部难以处理,并且只能依靠切断多余断股来对通电的线缆进行保护,效果不佳,无法将断裂的断股与导地线主体重新卡紧。
技术实现思路
1、本实用新型的目的在于提供一种线路断股维修机器人用夹爪,以克服现有技术存在的缺陷,本实用新型具备将断股与导地线缆进行卡紧修复,避免切断后的断股在逐渐受力的情况下,再次扩散翘起的问题,修复效果好。
2、为达到上述目的,本实用新型采用如下技术方案:
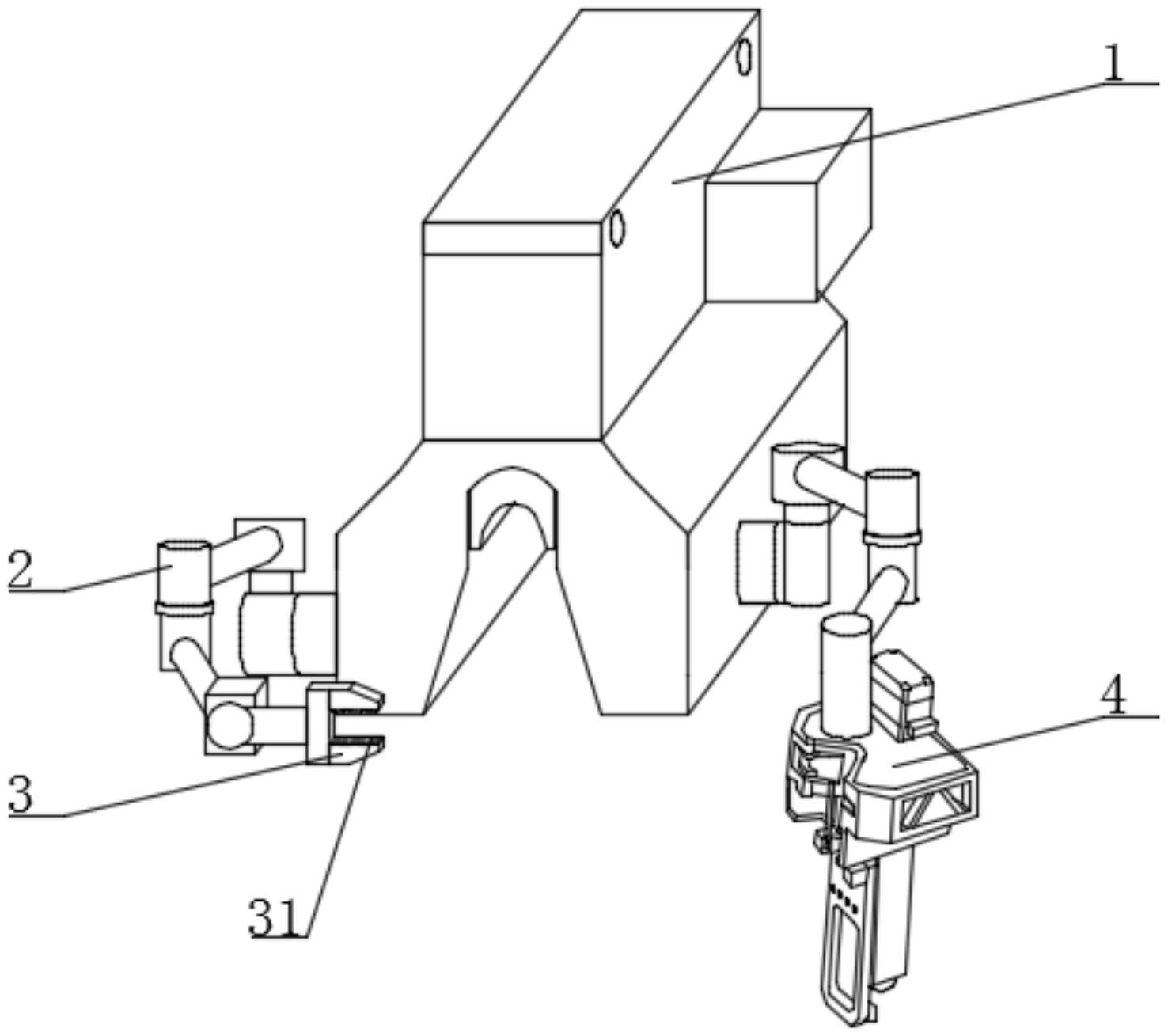
3、一种线路断股维修机器人用夹爪,包括维修机器人主体,所述维修机器人主体左右两侧均安装有六轴关节机械臂,左侧的所述六轴关节机械臂的自由端安装有机械爪,右侧的所述六轴关节机械臂的自由端安装有维修爪机构,所述维修爪机构与机械爪相配合使用。
4、进一步地,所述维修爪机构包括主架、夹紧机构、料仓、推料电机和推杆,所述主架外侧与右侧的六轴关节机械臂固定连接,所述夹紧机构安装至主架上,所述料仓的一侧与主架固定连接,所述料仓的另一侧固定连接有推料电机,所述推料电机的输出端通过联轴器与推杆固定连接,所述推杆的底部滑动连接至推料电机的顶部,所述推杆与料仓相配合。
5、进一步地,所述夹紧机构包括舵机、两个转动辊、两个齿环和两个夹紧爪,所述舵机的外侧与主架固定连接,所述舵机的输出端与背面的转动辊固定连接,正面的转动辊的一端与舵机转动连接,两个所述转动辊的另一端均贯穿并转动连接至主架的内部,两个所述齿环的内部分别与两个转动辊转动连接,两个所述齿环的外侧相互啮合,两组所述夹紧爪分别固定连接至两个转动辊上。
6、进一步地,两个所述夹紧爪相互啮合,所述主架的上开设有两个契合槽,两个所述夹紧爪分别与两个契合槽相契合。
7、进一步地,所述主架的顶部开还设有第一v形槽,所述第一v形槽与两个夹紧爪相配合。
8、进一步地,所述料仓的顶部设置有第二v形槽,所述推杆的顶部设置有第三v形槽,所述第一v形槽、第二v形槽和第三v形槽的底部高度一致。
9、进一步地,所述机械爪的内部固定连接有两排卡紧齿。
10、进一步地,所述推杆靠近料仓的一侧固定连接有延长杆。
11、与现有技术相比,本实用新型具有以下有益的技术效果:
12、本方案通过维修机器人主体作为装置主体,将卡扣放置在料仓内部,先使用现有技术中的无人机将维修机器人主体输送至线缆上,然后通过控制设备远程控制维修机器人主体沿着线缆运动至断股处,然后启动左侧的六轴关节机械臂带动机械爪将断股翘起的端部夹持并拉直,然后启动右侧的六轴关节机械臂带动维修爪机构从底部与导地线契合,然后启动机械爪将断股处放入维修爪机构内部使其与导地线贴紧,然后启动维修爪机构使用卡扣将断股与导地线主体卡紧,完成维修,从而实现了将断股与导地线缆进行卡紧修复,避免切断后的断股在逐渐受力的情况下,再次扩散翘起的问题,修复效果好。
技术特征:
1.一种线路断股维修机器人用夹爪,其特征在于,包括维修机器人主体(1),所述维修机器人主体(1)左右两侧均安装有六轴关节机械臂(2),左侧的所述六轴关节机械臂(2)的自由端安装有机械爪(3),右侧的所述六轴关节机械臂(2)的自由端安装有维修爪机构(4),所述维修爪机构(4)与机械爪(3)相配合使用;
2.根据权利要求1所述的一种线路断股维修机器人用夹爪,其特征在于,所述夹紧机构(42)包括舵机(421)、两个转动辊(422)、两个齿环(423)和两个夹紧爪(424),所述舵机(421)的外侧与主架(41)固定连接,所述舵机(421)的输出端与背面的转动辊(422)固定连接,正面的转动辊(422)的一端与舵机(421)转动连接,两个所述转动辊(422)的另一端均贯穿并转动连接至主架(41)的内部,两个所述齿环(423)的内部分别与两个转动辊(422)转动连接,两个所述齿环(423)的外侧相互啮合,两组所述夹紧爪(424)分别固定连接至两个转动辊(422)上。
3.根据权利要求2所述的一种线路断股维修机器人用夹爪,其特征在于,两个所述夹紧爪(424)相互啮合,所述主架(41)的上开设有两个契合槽(5),两个所述夹紧爪(424)分别与两个契合槽(5)相契合。
4.根据权利要求2所述的一种线路断股维修机器人用夹爪,其特征在于,所述主架(41)的顶部开还设有第一v形槽(6),所述第一v形槽(6)与两个夹紧爪(424)相配合。
5.根据权利要求4所述的一种线路断股维修机器人用夹爪,其特征在于,所述料仓(43)的顶部设置有第二v形槽,所述推杆(45)的顶部设置有第三v形槽,所述第一v形槽(6)、第二v形槽和第三v形槽的底部高度一致。
6.根据权利要求1所述的一种线路断股维修机器人用夹爪,其特征在于,所述机械爪(3)的内部固定连接有两排卡紧齿(31)。
7.根据权利要求1所述的一种线路断股维修机器人用夹爪,其特征在于,所述推杆(45)靠近料仓(43)的一侧固定连接有延长杆(451)。
技术总结
本技术属于线路断股维修设备领域,公开了一种线路断股维修机器人用夹爪,包括维修机器人主体,所述维修机器人主体左右两侧均安装有六轴关节机械臂,左侧的所述六轴关节机械臂的另一端安装有机械爪,右侧的所述六轴关节机械臂的另一端安装有维修爪机构,所述维修爪机构与机械爪相配合使用。本技术通过维修机器人主体作为装置主体,将卡扣放置在维修爪机构内部,先使用无人机将维修机器人主体输送至线缆上,然后通过控制设备远程控制维修机器人主体沿着线缆运动至断股处,从而实现了将断股与导地线缆进行卡紧修复,避免切断后的断股在逐渐受力的情况下,再次扩散翘起的问题,修复效果好。
技术研发人员:周红亮,李宏军,赵超,翟宾,权生力,张俊杰,常江,金福涛,周钊辉,张梦雯,张小波,徐宏飞
受保护的技术使用者:国网陕西省电力有限公司宝鸡供电公司
技术研发日:20221117
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!