一种工业机器人坐标系标定模块的制作方法
本技术属于工业机器人坐标系标定,具体涉及一种工业机器人坐标系标定模块。
背景技术:
1、工业机器人是工业生产中常见的装置,而在使用时,为了使工业机器人按照路径完成相应的工序,需要对其进行坐标系设定,而常见的标定方法为四点标定法,在机器人附近使用标定模块设置一个点,然后使工业机器人的工具中心对准改点,保持工具中心点,然后更换夹具姿态,在不同的位置记录四次即可生成工业机器人坐标系的参数,而一个工具通常需要多个坐标系。
2、现在所使用的坐标系标定模块设置好位置后进行单个坐标系进行标定,然后移动标定模块进行下一个坐标系的标定,由于标定结构的顶点较为尖锐,受到外力的碰触后容易导致其发生形变,从而导致测定数据有误的情况,而标定模块在调整位置时,其盘状的样式会导致其移动时容易握持不稳,从而导致掉落的情况,而掉落后的标定模块容易导致标定结构损坏。
技术实现思路
1、本实用新型的目的在于提供一种工业机器人坐标系标定模块,以解决现有的标定模块在更换位置时发生掉落情况时,标定结构容易损坏的问题。
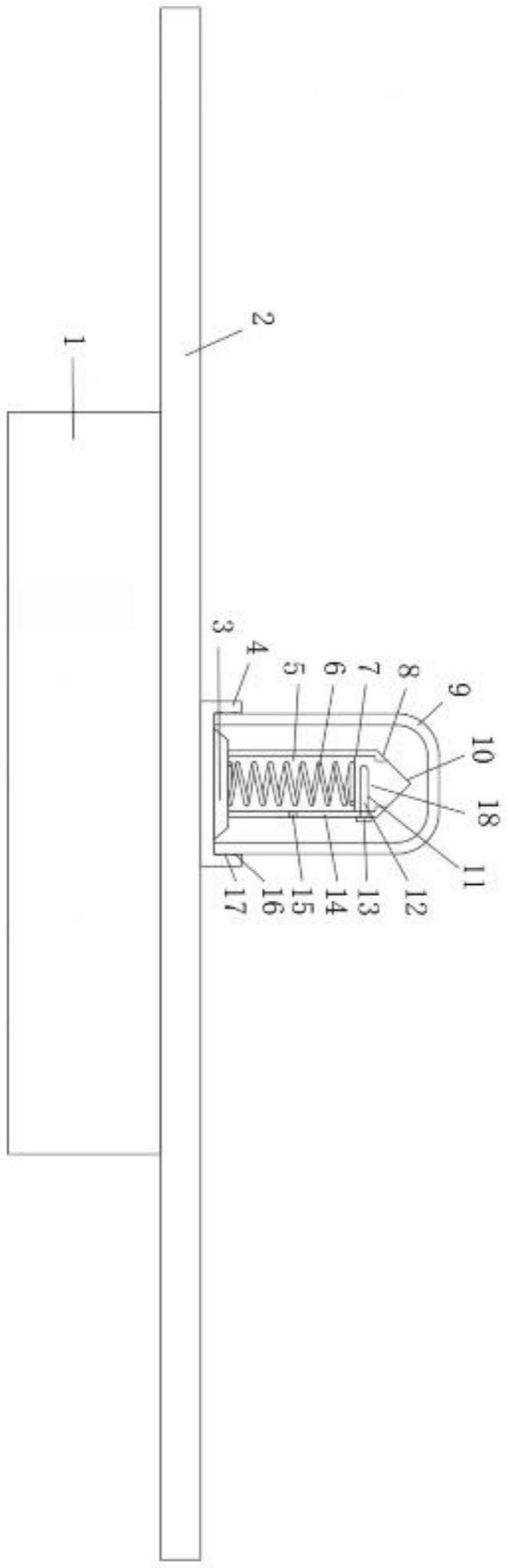
2、为实现上述目的,本实用新型提供如下技术方案:一种工业机器人坐标系标定模块,包括标定盘,所述标定盘的上方设置有标定结构,所述标定结构包括标定柱,且标定柱的内部设置有弹簧,所述标定柱的侧壁开设有相互连通的滑槽和平槽,所述滑槽和平槽相互垂直,所述弹簧的顶端设置有标定块,且弹簧的内部开设有插孔,所述插孔的内部安装有可在滑槽和平槽内移动的插条,所述插条的端部安装有限位块。
3、优选的,所述标定柱的内部开设有内腔,所述标定块的表壁设置有限位环。
4、优选的,所述标定结构的底部设置有固定盘,且固定盘的外侧设置有固定外环。
5、优选的,所述固定外环的内壁开设有第二螺纹层,所述固定外环的上方设置有防护罩,且防护罩表壁的底端开设有第一螺纹层。
6、优选的,所述标定盘的底部安装有底座,所述底座和标定盘固定连接。
7、优选的,所述标定柱的顶端开设有倾斜切口,且倾斜切口的倾斜角度和标定块顶端的倾斜角度相同。
8、本实用新型与现有技术相比,具有以下有益效果:
9、(1)本实用新型设置了标定柱,且标定柱的内部安装了弹簧,在弹簧的顶端设置了标定块,而标定块的侧壁设置了限位环,标定柱的侧壁开设了滑槽和平槽,使用时,将插条从滑槽处插入限位环内部开设的插孔,然后即可通过拨动限位块的方式来以滑槽和平槽为路径进行调整标定块的位置,在更换坐标点时,向下滑动限位块,直至将其移动至平槽上,以此将标定块收缩至标定柱的内部,避免其顶端受到破坏。
10、(2)本实用新型设置了固定外环和保护罩,且固定外环的内壁设置了第二螺纹槽,在保护罩表壁的底部处开设了可以和第二螺纹槽相互旋合的第一螺纹槽,使用时,将第二保护罩拧至固定外环的内侧进行固定,从而借助保护罩对标定结构进行保护,以此使得储存标定模块时,标定结构不会受到损坏。
技术特征:
1.一种工业机器人坐标系标定模块,其特征在于:包括标定盘(2),所述标定盘(2)的上方设置有标定结构;
2.根据权利要求1所述的一种工业机器人坐标系标定模块,其特征在于:所述标定柱(7)的内部开设有内腔(5),所述标定块(10)的表壁设置有限位环(18)。
3.根据权利要求2所述的一种工业机器人坐标系标定模块,其特征在于:所述标定结构的底部设置有固定盘(3),且固定盘(3)的外侧设置有固定外环(4)。
4.根据权利要求3所述的一种工业机器人坐标系标定模块,其特征在于:所述固定外环(4)的内壁开设有第二螺纹层(17),所述固定外环(4)的上方设置有防护罩(9),且防护罩(9)表壁的底端开设有第一螺纹层(16)。
5.根据权利要求4所述的一种工业机器人坐标系标定模块,其特征在于:所述标定盘(2)的底部安装有底座(1),所述底座(1)和标定盘(2)固定连接。
6.根据权利要求5所述的一种工业机器人坐标系标定模块,其特征在于:所述标定柱(7)的顶端开设有倾斜切口(8),且倾斜切口(8)的倾斜角度和标定块(10)顶端的倾斜角度相同。
技术总结
本技术属于工业机器人坐标系标定技术领域,公开了一种工业机器人坐标系标定模块,包括标定盘,所述标定盘的上方设置有标定结构,所述标定结构包括标定柱,且标定柱的内部设置有弹簧,所述标定柱的侧壁开设有相互连通的滑槽和平槽,所述滑槽和平槽相互垂直,所述弹簧的顶端设置有标定块,且弹簧的内部开设有插孔,所述插孔的内部安装有插条,使用时,将插条从滑槽处插入限位环内部开设的插孔,然后即可通过拨动限位块的方式来以滑槽和平槽为路径进行调整标定块的位置,在更换坐标点时,向下滑动限位块,直至将其移动至平槽上,以此将标定块收缩至标定柱的内部,避免其顶端受到破坏。
技术研发人员:王锴,王凯,石伟
受保护的技术使用者:深圳凌鼎智能装备科技有限公司
技术研发日:20221124
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!