一种机械可浮动视觉跟踪检测的集电环模内嵌件执行机构的制作方法
本技术涉及机器人领域,特别涉及一种机械可浮动视觉跟踪检测的集电环模内嵌件执行机构。
背景技术:
1、集电环是同步电机和异步电机都需要采用的重要组成部分,其主要由多个铜环嵌套而成,每个铜环都带有引线,通过模内镶嵌注塑工艺使铜环和引线都固定到位。由于铜环和引线导电的特殊性,在生产的过程中人员需要格外小心避免表面氧化或静电导致损坏。
2、同时膜内镶嵌工艺对嵌件安装要求较高,需要使嵌件完全顺畅地进入模具腔体,方可保证集电环产品表面无损伤。
3、现有的集电环模内嵌件执行机构存在工作不稳定、定位不精准的缺陷。
4、亟需一种工作稳定、定位精确的机械可浮动视觉跟踪检测的集电环模内嵌件执行机构来解决上述技术问题。
技术实现思路
1、为了解决上述问题,本实用新型提供了一种机械可浮动视觉跟踪检测的集电环模内嵌件执行机构,本实用新型的机械可浮动视觉跟踪检测的集电环模内嵌件执行机构工作稳定、定位精确。
2、本实用新型是通过如下技术方案解决上述技术问题的:
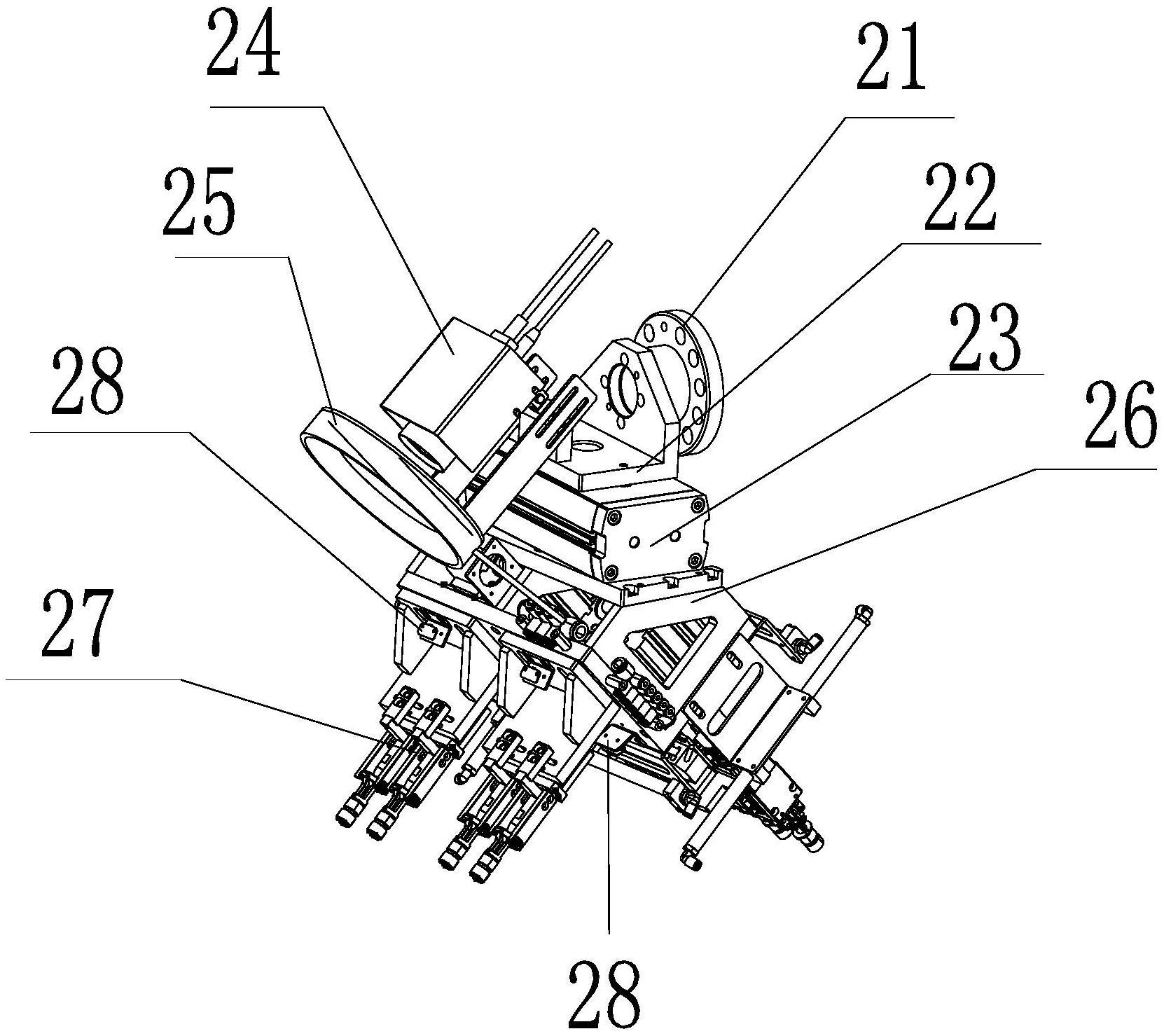
3、本实用新型提供了一种机械可浮动视觉跟踪检测的集电环模内嵌件执行机构,包括安装法兰、气缸固定板、回转气缸、回转结构件、工业相机、光源、四个可浮动取放组件、清洁吹气排和若干料头传感器;所述气缸固定板固定在所述安装法兰上;所述回转气缸固定在所述气缸固定板的下方;所述工业相机和光源固定在所述气缸固定板的上方;所述回转结构件固定在所述回转气缸的转台上;所述可浮动取放组件固定在所述回转结构件上;所述料头传感器固定在所述回转结构件上,并与所述可浮动取放组件相对应;所述清洁吹气排固定在所述回转结构件上;所述可浮动取放组件包括取放直线导轨组件、位移传感器、取放连接板、两个伸出气缸、两个蝶形弹簧浮动机构和两个取放夹爪,所述取放直线导轨组件和所述回转结构件相连;所述取放连接板固定在所述取放直线导轨组件的滑块上;所述伸出气缸连接所述取放连接板;所述位移传感器固定在所述取放连接板上;所述蝶形弹簧浮动机构固定在所述取放连接板的下方,所述取放夹爪固定在所述蝶形弹簧浮动机构上;所述蝶形弹簧浮动机构包括上固定钢套、蝶形弹簧、浮动中轴、球面垫块和下固定钢套,所述浮动中轴设置在所述上固定钢套和所述下固定钢套的内腔,所述蝶形弹簧套在所述浮动中轴外部的中部,所述球面垫块设置在所述下固定钢套的内腔并与所述浮动中轴的底部接触,所述上固定钢套连接所述取放连接板,所述下固定钢套连接所述取放夹爪。
4、本实用新型中,所述料头传感器用于判断注塑成型成品上的料头是否异常脱落;
5、较佳地,所述料头传感器的个数为4个,所述料头传感器和所述可浮动取放组件一一对应。
6、本实用新型中,所述安装法兰用于连接机械手或者六轴机器人等运动机构。
7、本实用新型的机械可浮动视觉跟踪检测的集电环模内嵌件执行机构的工作原理为:
8、在六轴机器人(或机械手)驱动下,装置对托盘进行拍照,检测嵌件是否有异常姿态,之后翻转至取放嵌件姿态从托盘中一次取走4件嵌件;
9、装置根据拍照结果将原本异常姿态的嵌入件在精定位平台上纠正,并再次取走;
10、装置运动至注塑生产设备上,并翻转至取放成品姿态,将模具中已经加工完成的集电环夹取出;
11、装置对模具表面及模具内腔体进行吹气清洁;后对模具进行一次拍照,判断模具表面是否有异物并定位模具腔体位置;
12、装置翻转至嵌件取放姿态,通过视觉纠偏将4个嵌件置于模具内腔体中;工业相机对模具进行二次拍照,判断嵌件是否摆放到位;
13、装置运动至料头收集箱处,通过运动将集电环上的料头切断;
14、装置翻转至成品取放姿态,将4件集电环成品放置于原先4个嵌件的空位中,再次取嵌件。
15、本实用新型的积极进步效果:本实用新型的机械可浮动视觉跟踪检测的集电环模内嵌件执行机构工作稳定、定位精确。
技术特征:
1.一种机械可浮动视觉跟踪检测的集电环模内嵌件执行机构,其特征在于,其包括安装法兰、气缸固定板、回转气缸、回转结构件、工业相机、光源、四个可浮动取放组件、清洁吹气排和若干料头传感器;所述气缸固定板固定在所述安装法兰上;所述回转气缸固定在所述气缸固定板的下方;所述工业相机和光源固定在所述气缸固定板的上方;所述回转结构件固定在所述回转气缸的转台上;所述可浮动取放组件固定在所述回转结构件上;所述料头传感器固定在所述回转结构件上,并与所述可浮动取放组件相对应;所述清洁吹气排固定在所述回转结构件上;所述可浮动取放组件包括取放直线导轨组件、位移传感器、取放连接板、两个伸出气缸、两个蝶形弹簧浮动机构和两个取放夹爪,所述取放直线导轨组件和所述回转结构件相连;所述取放连接板固定在所述取放直线导轨组件的滑块上;所述伸出气缸连接所述取放连接板;所述位移传感器固定在所述取放连接板上;所述蝶形弹簧浮动机构固定在所述取放连接板的下方,所述取放夹爪固定在所述蝶形弹簧浮动机构上;所述蝶形弹簧浮动机构包括上固定钢套、蝶形弹簧、浮动中轴、球面垫块和下固定钢套,所述浮动中轴设置在所述上固定钢套和所述下固定钢套的内腔,所述蝶形弹簧套在所述浮动中轴外部的中部,所述球面垫块设置在所述下固定钢套的内腔并与所述浮动中轴的底部接触,所述上固定钢套连接所述取放连接板,所述下固定钢套连接所述取放夹爪。
2.如权利要求1所述的机械可浮动视觉跟踪检测的集电环模内嵌件执行机构,其特征在于,所述料头传感器的个数为4个,所述料头传感器和所述可浮动取放组件一一对应。
技术总结
本技术公开了一种机械可浮动视觉跟踪检测的集电环模内嵌件执行机构,包括安装法兰、气缸固定板、回转气缸、回转结构件、工业相机、光源、四个可浮动取放组件、清洁吹气排和若干料头传感器;气缸固定板固定在安装法兰上;回转气缸固定在气缸固定板的下方;工业相机和光源固定在气缸固定板的上方;回转结构件固定在回转气缸的转台上;可浮动取放组件固定在回转结构件上;料头传感器固定在回转结构件上,并与可浮动取放组件相对应;清洁吹气排固定在回转结构件上。本技术的机械可浮动视觉跟踪检测的集电环模内嵌件执行机构工作稳定、定位精确。
技术研发人员:施耀辉
受保护的技术使用者:上海超路自动化设备有限公司
技术研发日:20221130
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!