机器人驱动机构检测用多功能夹持工装的制作方法
本技术涉及一种机器人驱动机构检测用夹持工装,尤其涉及一种机器人驱动机构检测用多功能夹持工装。
背景技术:
1、随着经济的飞速发展,越来越多的企业开始使用机器人代替工人以降低成本,协作机器人因其价格低廉、安全易维护、精度高等优点更是受到市场的欢迎。协作机器人的主要组件就是驱动机构,其承担协作机器人的传动和负载,所以驱动机构的质量好坏会影响协、作机器人的负载、震动、重复定位精度等。
2、如图1所示,机器人驱动机构1包括外壳11和安装于外壳11内的无框电机(图中不可视)、减速机构(图中不可视)和抱闸(图中不可视),机器人驱动机构1包括三个端部且分别为用于输出旋转动力的动力输出端10、用于连接电源以及输入输出信号的电气连接端13和用于安装在机器人其它部件上的安装端12,其中,动力输出端10和电气连接端13为平面端,电气连接端13为斜面端且该端设有用于快速电气连接的插座14。
3、随着机器人的应用场景越来越多,机器人驱动机构1的不同性能要求和不同型号尺寸也越来越多,比如,在完成组装后需要进行温升、噪音、负载、转速、扭矩等相关检测后才算合格。
4、机器人驱动机构的传统检测方式是针对不同检测项目在不同的检测机构上完成检测工作,需要采用螺钉连接的方式将机器人驱动机构与对应的夹持工装连接,这种螺钉连接方式导致不同尺寸的驱动机构的装拆非常繁琐,降低了安装效率并增加了人力和时间成本。
技术实现思路
1、本实用新型的目的就在于为了解决上述问题而提供一种通过夹持压紧方式实现安装的机器人驱动机构检测用多功能夹持工装。
2、本实用新型通过以下技术方案来实现上述目的:
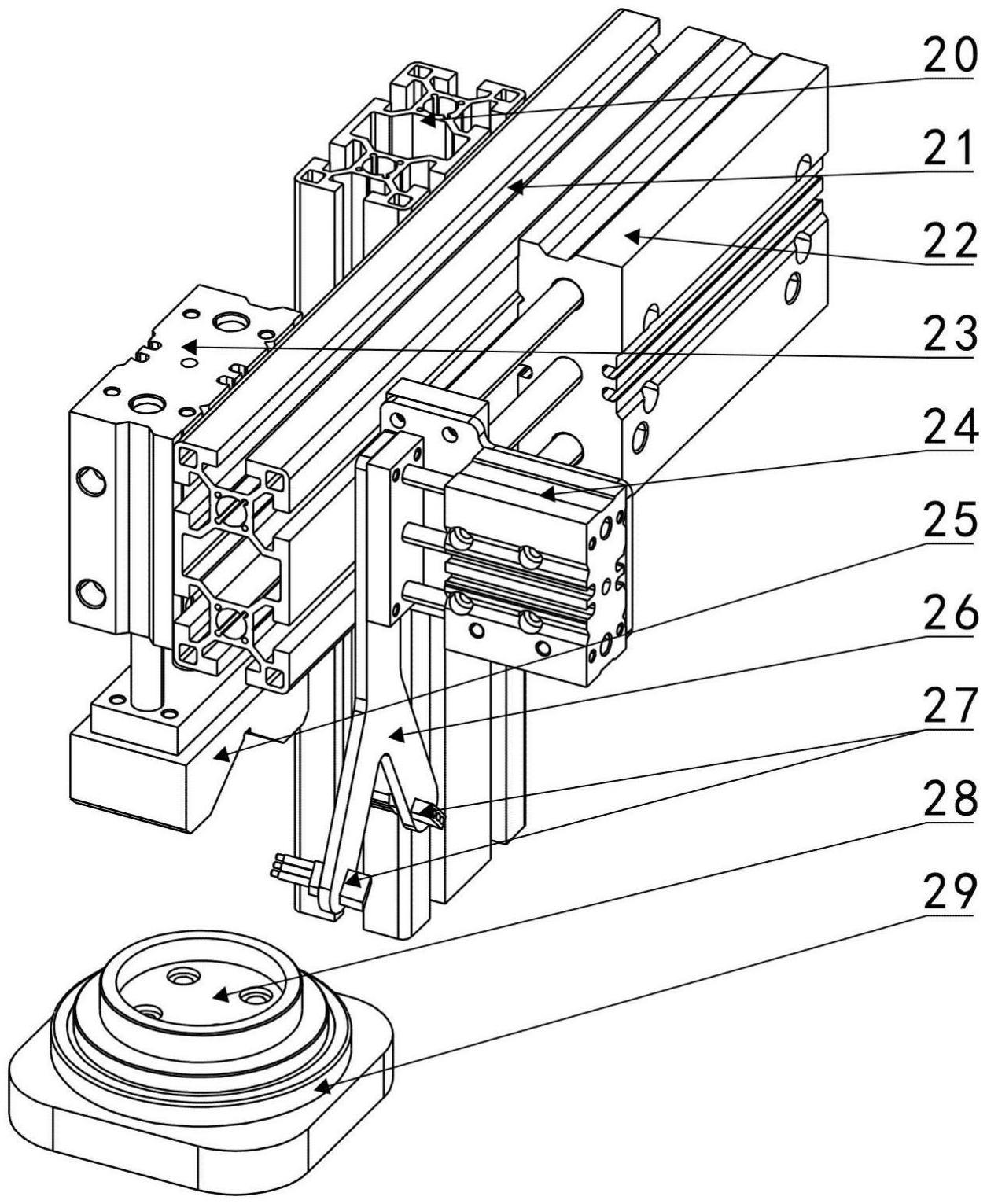
3、一种机器人驱动机构检测用多功能夹持工装,所述机器人驱动机构包括外壳和安装于所述外壳内的无框电机、减速机构、抱闸,所述机器人驱动机构包括三个端部且分别为用于输出旋转动力的动力输出端、用于连接电源以及输入输出信号的电气连接端和用于安装在机器人其它部件上的安装端,所述机器人驱动机构检测用多功能夹持工装包括夹持底座、立柱、横杆、夹持块驱动气缸、倒“v”形夹持块和控制器,所述横杆与所述立柱的上部连接,竖向的所述夹持块驱动气缸安装在所述横杆上,所述夹持块驱动气缸的活塞杆的下端与所述倒“v”形夹持块的上端连接,所述夹持底座立于所述倒“v”形夹持块的正下方,所述夹持底座上设有用于安装所述机器人驱动机构的安装端的安装槽,所述夹持块驱动气缸的控制输入端与所述控制器的控制输出端对应连接。
4、作为优选,为了便于将机器人驱动机构的电气连接端与控制器连接,所述机器人驱动机构检测用多功能夹持工装还包括电气连接插头、插头安装支架、第一插头驱动气缸和第二插头驱动气缸,横向的所述第一插头驱动气缸安装在所述横杆上,所述第一插头驱动气缸的活塞杆与横向的所述第二插头驱动气缸连接,所述第二插头驱动气缸的活塞杆与所述第一插头驱动气缸的活塞杆相互垂直,所述第二插头驱动气缸的活塞杆与所述插头安装支架连接,所述电气连接插头安装在所述插头安装支架上并位于所述夹持底座的斜上方,所述第一插头驱动气缸的控制输入端和所述第二插头驱动气缸的控制输入端分别与所述控制器的控制输出端对应连接,所述电气连接插头与所述控制器对应连接。
5、作为优选,为了适应机器人驱动机构的两个插座连接需求,所述插头安装支架为倒“y”形支架且两个所述电气连接插头分别安装在该倒“y”形支架的两个斜杆的下部。
6、作为优选,为了增加立柱的稳定性并便于安装气缸,所述立柱和所述横杆的径向截面均为长方形。
7、作为优选,为了便于加工并具有足够大的强度和足够小的重量,所述立柱和所述横杆均为非实心结构的铝合金件。
8、作为优选,为了便于通过磁力将立柱和夹持底座安装在工作平台上,所述立柱的底部和所述夹持底座的底部分别安装有永磁体。
9、作为优选,为了便于在安装机器人驱动机构的同时直接检测其重量,所述夹持底座内安装有重力传感器,所述重力传感器的信号输出端与所述控制器的信号输入端对应连接。
10、本实用新型的有益效果在于:
11、本实用新型使用时将夹持底座和立柱安装在工作平台上,通过夹持底座和倒“v”形夹持块配合能够快速夹持固定不同尺寸的机器人驱动机构,显著提高了机器人驱动机构的夹持固定安装效率,降低了人力和时间成本,并兼容不同尺寸的机器人驱动机构。
技术特征:
1.一种机器人驱动机构检测用多功能夹持工装,所述机器人驱动机构包括外壳和安装于所述外壳内的无框电机、减速机构、抱闸,所述机器人驱动机构包括三个端部且分别为用于输出旋转动力的动力输出端、用于连接电源以及输入输出信号的电气连接端和用于安装在机器人其它部件上的安装端,其特征在于:所述机器人驱动机构检测用多功能夹持工装包括夹持底座、立柱、横杆、夹持块驱动气缸、倒“v”形夹持块和控制器,所述横杆与所述立柱的上部连接,竖向的所述夹持块驱动气缸安装在所述横杆上,所述夹持块驱动气缸的活塞杆的下端与所述倒“v”形夹持块的上端连接,所述夹持底座位于所述倒“v”形夹持块的正下方,所述夹持底座上设有用于安装所述机器人驱动机构的安装端的安装槽,所述夹持块驱动气缸的控制输入端与所述控制器的控制输出端对应连接。
2.根据权利要求1所述的机器人驱动机构检测用多功能夹持工装,其特征在于:所述机器人驱动机构检测用多功能夹持工装还包括电气连接插头、插头安装支架、第一插头驱动气缸和第二插头驱动气缸,横向的所述第一插头驱动气缸安装在所述横杆上,所述第一插头驱动气缸的活塞杆与横向的所述第二插头驱动气缸连接,所述第二插头驱动气缸的活塞杆与所述第一插头驱动气缸的活塞杆相互垂直,所述第二插头驱动气缸的活塞杆与所述插头安装支架连接,所述电气连接插头安装在所述插头安装支架上并位于所述夹持底座的斜上方,所述第一插头驱动气缸的控制输入端和所述第二插头驱动气缸的控制输入端分别与所述控制器的控制输出端对应连接,所述电气连接插头与所述控制器对应连接。
3.根据权利要求2所述的机器人驱动机构检测用多功能夹持工装,其特征在于:所述插头安装支架为倒“y”形支架且两个所述电气连接插头分别安装在该倒“y”形支架的两个斜杆的下部。
4.根据权利要求2或3所述的机器人驱动机构检测用多功能夹持工装,其特征在于:所述立柱和所述横杆的径向截面均为长方形。
5.根据权利要求4所述的机器人驱动机构检测用多功能夹持工装,其特征在于:所述立柱和所述横杆均为非实心结构的铝合金件。
6.根据权利要求2或3所述的机器人驱动机构检测用多功能夹持工装,其特征在于:所述立柱的底部和所述夹持底座的底部分别安装有永磁体。
7.根据权利要求1、2或3所述的机器人驱动机构检测用多功能夹持工装,其特征在于:所述夹持底座内安装有重力传感器,所述重力传感器的信号输出端与所述控制器的信号输入端对应连接。
技术总结
本技术公开了一种机器人驱动机构检测用多功能夹持工装,包括夹持底座、立柱、横杆、夹持块驱动气缸、倒“V”形夹持块和控制器,横杆与立柱的上部连接,竖向的夹持块驱动气缸安装在横杆上,夹持块驱动气缸的活塞杆的下端与倒“V”形夹持块的上端连接,夹持底座位于倒“V”形夹持块的正下方,夹持底座上设有用于安装机器人驱动机构的安装端的安装槽,夹持块驱动气缸的控制输入端与控制器的控制输出端对应连接。本技术通过夹持底座和倒“V”形夹持块配合能够快速夹持固定不同尺寸的机器人驱动机构,显著提高了机器人驱动机构的夹持固定安装效率,降低了人力和时间成本,并兼容不同尺寸的机器人驱动机构。
技术研发人员:苏太郎,李星
受保护的技术使用者:成都瑞迪智驱科技股份有限公司
技术研发日:20221201
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!