一种用于电力设备的挂轨式巡检机器人的制作方法
本技术涉及巡检机器人,具体为一种用于电力设备的挂轨式巡检机器人。
背景技术:
1、为了保障配电站房内的安全性,需要定期对配电站房内进行巡检,在现有技术中,一般都是依靠人工进行巡检,由于配电站房内线路比较多,人工巡检存在一定的安全隐患,进而如何安全有效的对配电站房内电力设备进行巡检是当前社会所面临的重要难题,为此我们提出一种用于电力设备的挂轨式巡检机器人,解决以上提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种用于电力设备的挂轨式巡检机器人,具备能够安全有效的对配电站房内电力设备进行巡检的优点,解决了现有技术中,一般都是依靠人工进行巡检,由于配电站房内线路比较多,人工巡检存在一定的安全隐患的问题。
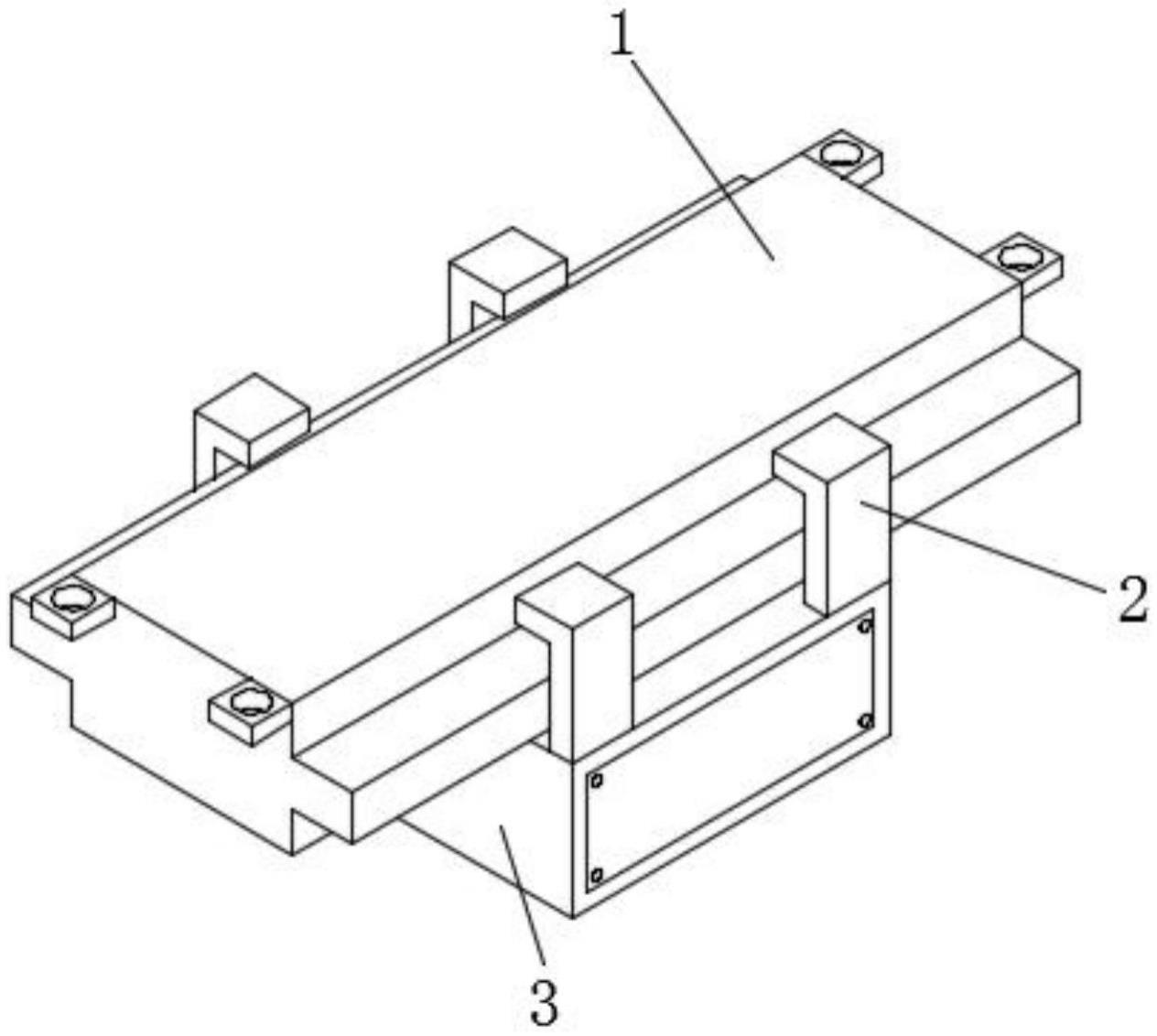
2、为实现上述目的,本实用新型提供如下技术方案:一种用于电力设备的挂轨式巡检机器人,包括挂轨本体,所述挂轨本体的外表面滑动连接有支撑杆,所述支撑杆的底部固定连接有外壳,所述外壳内腔顶部的中心处通过轴承转动连接有第一转轴,所述第一转轴的底部贯穿外壳且固定连接有凹型框,所述凹型框内腔正面的底部固定连接有伺服电机,所述伺服电机的输出端固定连接有第二转轴,所述第二转轴的背面固定连接巡检摄像头,所述外壳内腔左侧的顶部固定连接有电动气缸,所述电动气缸的伸缩端固定连接有齿牙板,所述第一转轴外表面的顶部套接有齿轮,所述齿牙板的外表面与齿轮的外表面啮合。
3、优选的,所述齿牙板顶部的左右两侧均固定连接有滑块,所述外壳内腔顶部的左右两侧均开设有配合滑块使用的滑槽,所述滑块的外表面与滑槽的内表面滑动连接。
4、优选的,所述外壳内腔底部的右侧固定连接有数据处理器,所述外壳内腔底部的左侧固定连接有plc控制器。
5、优选的,所述巡检摄像头的背面固定连接有转杆,所述转杆的背面与凹型框内腔的背面通过轴承转动连接。
6、优选的,所述挂轨本体左右两侧顶部的前后位置均固定连接有安装块,且安装块的顶部开设有安装孔。
7、优选的,所述外壳的正面通过螺丝固定连接有检修板,所述支撑杆的数量为四个。
8、与现有技术相比,本实用新型的有益效果如下:
9、本实用新型使用时,将挂轨本体通过安装块和安装孔安装在配电站的屋顶上,通过巡检摄像头对配电站的内腔情况进行监测,当需要调节巡检摄像头的水平角度时,启动电动气缸的控制开关,电动气缸推动齿牙板左右移动,齿牙板带动齿轮转动,齿轮带动第一转轴转动,第一转轴带动凹型框转动,进而带动巡检摄像头旋转,对巡检摄像头的水平监测角度进行调节,当需要对巡检摄像头的垂直角度进行调节时,启动伺服电机的控制开关,伺服电机带动第二转轴旋转,第二转轴带动巡检摄像头翻转,对巡检摄像头的垂直监测角度进行调节,进而能够扩大巡检摄像头的监测范围,通过设置以上结构,具备能够安全有效的对配电站房内电力设备进行巡检的优点,解决了现有技术中,一般都是依靠人工进行巡检,由于配电站房内线路比较多,人工巡检存在一定的安全隐患的问题。
技术特征:
1.一种用于电力设备的挂轨式巡检机器人,包括挂轨本体(1),其特征在于:所述挂轨本体(1)的外表面滑动连接有支撑杆(2),所述支撑杆(2)的底部固定连接有外壳(3),所述外壳(3)内腔顶部的中心处通过轴承转动连接有第一转轴(4),所述第一转轴(4)的底部贯穿外壳(3)且固定连接有凹型框(5),所述凹型框(5)内腔正面的底部固定连接有伺服电机(6),所述伺服电机(6)的输出端固定连接有第二转轴(7),所述第二转轴(7)的背面固定连接巡检摄像头(8),所述外壳(3)内腔左侧的顶部固定连接有电动气缸(9),所述电动气缸(9)的伸缩端固定连接有齿牙板(10),所述第一转轴(4)外表面的顶部套接有齿轮(11),所述齿牙板(10)的外表面与齿轮(11)的外表面啮合。
2.根据权利要求1所述的一种用于电力设备的挂轨式巡检机器人,其特征在于:所述齿牙板(10)顶部的左右两侧均固定连接有滑块(12),所述外壳(3)内腔顶部的左右两侧均开设有配合滑块(12)使用的滑槽(13),所述滑块(12)的外表面与滑槽(13)的内表面滑动连接。
3.根据权利要求1所述的一种用于电力设备的挂轨式巡检机器人,其特征在于:所述外壳(3)内腔底部的右侧固定连接有数据处理器(14),所述外壳(3)内腔底部的左侧固定连接有plc控制器(15)。
4.根据权利要求1所述的一种用于电力设备的挂轨式巡检机器人,其特征在于:所述巡检摄像头(8)的背面固定连接有转杆(16),所述转杆(16)的背面与凹型框(5)内腔的背面通过轴承转动连接。
5.根据权利要求1所述的一种用于电力设备的挂轨式巡检机器人,其特征在于:所述挂轨本体(1)左右两侧顶部的前后位置均固定连接有安装块,且安装块的顶部开设有安装孔。
6.根据权利要求1所述的一种用于电力设备的挂轨式巡检机器人,其特征在于:所述外壳(3)的正面通过螺丝固定连接有检修板,所述支撑杆(2)的数量为四个。
技术总结
本技术公开了一种用于电力设备的挂轨式巡检机器人,包括挂轨本体,挂轨本体的外表面滑动连接有支撑杆,支撑杆的底部固定连接有外壳,外壳内腔顶部的中心处通过轴承转动连接有第一转轴,第一转轴的底部贯穿外壳且固定连接有凹型框,通过设置巡检摄像头,可以对配电站内的情况进行监测,通过设置电动气缸、齿牙板和齿轮,能够带动第一转轴、凹型框和巡检摄像头水平旋转,对巡检摄像头的水平监测角度进行调节,通过设置伺服电机和第二转轴,能够带动巡检摄像头翻转,对巡检摄像头的垂直监测角度进行调节,进而能够扩大巡检摄像头的监测范围,通过设置以上结构,具备能够安全有效的对配电站房内电力设备进行巡检的优点。
技术研发人员:高强伟,刘伟,赵宇,岳振杰,李宇,陆炜灏,刘柯岳,肖彩霞,侯雪,刘轶超
受保护的技术使用者:国网天津市电力公司
技术研发日:20221202
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!