基于摄像头识别的捡球发球机器人
本技术涉及一种基于摄像头识别的捡球发球机器人。
背景技术:
1、现今足球已经成为一项很流行的运动,给人们生活带来了很大的乐趣。足球运动员在训练中,足球的发球是由教练或运动员用脚踢出的,既费力,而且足球的落点的正确性不高。
2、中国专利cn200720198926.1公开了一种双控足球发球机器人,包括发球机构和控制部分,其特点是:发球机构由竖直方向转动机构、水平方向转动机构、发球器和电动机保护电路组成;竖直方向转动机构包括底座,丝杆,螺母,电动机,发球器底座,竖直转动板,滑轮,连杆;底座上面通过铰链活动连接竖直转动板,竖直转动板前端通过铰连活动连接连杆,连杆经铰链与丝杆上的螺母相连;竖直转动板上面经滑轮安装有发球器底座;水平方向转动机构包括电动机,丝杆,螺母,水平转动轴,发球器底座下面固定连接水平转动轴,水平转动轴经连杆与丝杆上的螺母相连;发球器包括支架,弹簧,齿轮,链条,电动机,弹簧连杆,滚动拉杆,发球块,拉簧器;支架前端内装有弹簧,弹簧与发球块相连,发球块通过弹簧连杆与滚动拉杆连接,滚动拉杆与拉簧器配合连接,拉簧器前端具有斜面,后端有一缺口,并固定在由电动机,齿轮和链条组成的传动机构上;电动机保护电路由二只限位触动开关和二只晶体二极管组成,限位触动开关与晶体二极管并接;控制部分由无线电遥控和电脑程控组成。
3、这种双控足球发球机器人具备发球功能,机器人发出的球落点正确性远远大于用人脚踢出的球,所以使用“发球机器人”既可以提高训练效果,又可以减轻训练中陪练人员的工作强度。但是,这种双控足球发球机器人不具备捡球功能,在踢足球时足球被踢飞的情况时有出现,需要对这些被踢飞的球进行回收,目前完全依靠人工去捡球,而且捡球频繁,劳动强度大,捡球效率低。而足球场场地大,球被踢飞到远处的可能性更大,将这些飞远的球回收起来更费劲,十分影响踢球的体验。所以现在急需一种基于摄像头识别的捡球发球机器人,以改善前述缺陷。
技术实现思路
1、本实用新型的目的是提供一种基于摄像头识别的捡球发球机器人,能减小人力消耗,降低劳动强度,提高捡球效率,提升踢球体验。
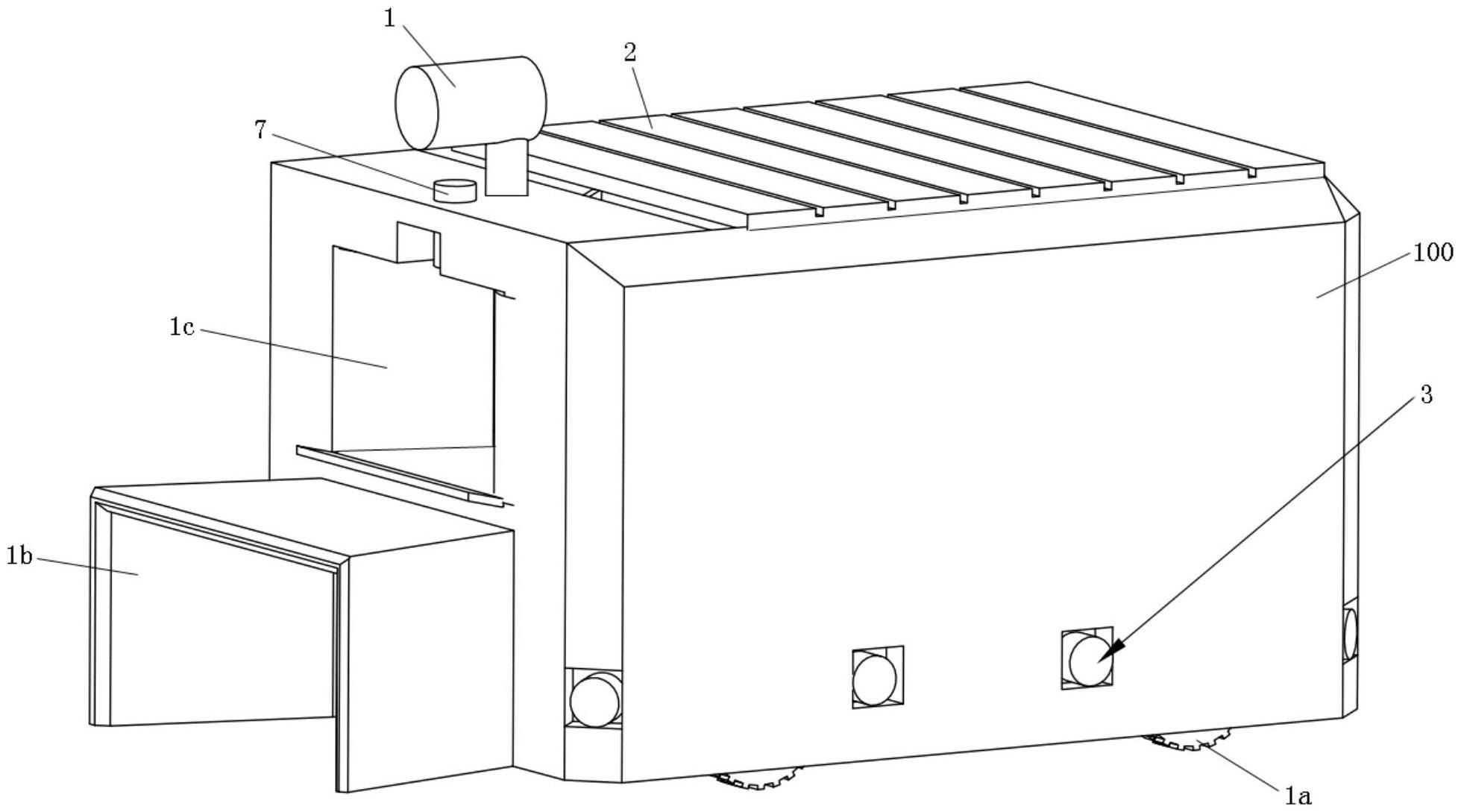
2、为实现上述目的,本实用新型提供一种基于摄像头识别的捡球发球机器人,包括箱体,所述箱体的底部有电动滚轮,箱体的一侧有捡球入口和位于捡球入口上方的发球出口,捡球入口处有电动输送结构,箱体内有把球一个个从捡球入口处沿箱体内导轨运输到箱体内与发球出口对应连通的储存腔处的电动旋转叶轮,捡球入口和发球出口处均有红外对管,箱体的顶部有可转动的摄像头,箱体内部安装有与电动滚轮、电动输送结构、电动旋转叶轮、红外对管和摄像头连接的控制器和供电用的蓄电池。
3、优选的,所述箱体的顶部在摄像头的前侧还装有语音识别模块,语音识别模块与控制器连接。
4、优选的,所述语音识别模块为ld3320语音识别模块。
5、优选的,所述箱体的与捡球入口相邻的侧面处还安装有用于避障的超声波模块。
6、优选的,所述超声波模块为hy-srf05超声波模块。
7、优选的,所述箱体的顶部安装有太阳能板,太阳能板与蓄电池相连。
8、优选的,所述太阳能板为多晶硅太阳能电池板,用于将太阳辐射能通过光电效应或者光化学效应直接或间接转换成电能;蓄电池为3.7v锂电池。
9、优选的,所述电动旋转叶轮连接的电机为ga12-n20微型直流低速减速电机。
10、优选的,所述摄像头为openmv摄像头,用于检测小球的位置并把位置信息传输给控制器。
11、优选的,所述控制器为stm32h7和stm32c8t6,红外对管为对射式光电开关发射接收计数模块传感器。
12、与现有技术相比,本实用新型的基于摄像头识别的捡球发球机器人的有益效果如下:
13、(1)结合了捡球和给球功能,可以在捡球后把球传回给人们,能减少捡球人力,减小人力消耗,减轻了人们的负担,降低了劳动强度,提高了捡球效率,提升了踢球体验。
14、(2)可以通过语音指令控制机器运作,可以通过听声辩位,确定发出语音指令的要球人的方位,实现精确传球,更加的人工智能。
15、通过以下的描述并结合附图,本实用新型将变得更加清晰,这些附图用于解释本实用新型的实施例。
技术特征:
1.一种基于摄像头识别的捡球发球机器人,其特征在于,包括:箱体,所述箱体的底部有电动滚轮,箱体的一侧有捡球入口和位于捡球入口上方的发球出口,捡球入口处有电动输送结构,箱体内有把球一个个从捡球入口处沿箱体内导轨运输到箱体内与发球出口对应连通的储存腔处的电动旋转叶轮,捡球入口和发球出口处均有红外对管,箱体的顶部有可转动的摄像头,箱体内部安装有与电动滚轮、电动输送结构、电动旋转叶轮、红外对管和摄像头连接的控制器和供电用的蓄电池。
2.如权利要求1所述的基于摄像头识别的捡球发球机器人,其特征在于:所述箱体的顶部在摄像头的前侧还装有语音识别模块,语音识别模块与控制器连接。
3.如权利要求2所述的基于摄像头识别的捡球发球机器人,其特征在于:所述语音识别模块为ld3320语音识别模块。
4.如权利要求1所述的基于摄像头识别的捡球发球机器人,其特征在于:所述箱体的与捡球入口相邻的侧面处还安装有用于避障的超声波模块。
5.如权利要求4所述的基于摄像头识别的捡球发球机器人,其特征在于:所述超声波模块为hy-srf05超声波模块。
6.如权利要求1所述的基于摄像头识别的捡球发球机器人,其特征在于:所述箱体的顶部安装有太阳能板,太阳能板与蓄电池相连。
7.如权利要求6所述的基于摄像头识别的捡球发球机器人,其特征在于:所述太阳能板为多晶硅太阳能电池板,用于将太阳辐射能通过光电效应或者光化学效应直接或间接转换成电能;蓄电池为3.7v锂电池。
8.如权利要求1所述的基于摄像头识别的捡球发球机器人,其特征在于:所述电动旋转叶轮连接的电机为ga12-n20微型直流低速减速电机。
9.如权利要求1所述的基于摄像头识别的捡球发球机器人,其特征在于:所述摄像头为openmv摄像头,用于检测小球的位置并把位置信息传输给控制器。
10.如权利要求1所述的基于摄像头识别的捡球发球机器人,其特征在于:所述控制器为stm32h7和stm32c8t6,红外对管为对射式光电开关发射接收计数模块传感器。
技术总结
本技术公开了一种基于摄像头识别的捡球发球机器人,包括箱体,所述箱体的底部有电动滚轮,箱体的一侧有捡球入口和位于捡球入口上方的发球出口,捡球入口处有电动输送结构,箱体内有把球一个个从捡球入口处沿箱体内导轨运输到箱体内与发球出口对应连通的储存腔处的电动旋转叶轮,捡球入口和发球出口处均有红外对管,箱体的顶部有可转动的摄像头,箱体内部安装有与电动滚轮、电动输送结构、电动旋转叶轮、红外对管和摄像头连接的控制器和供电用的蓄电池。本技术的基于摄像头识别的捡球发球机器人能减小人力消耗,降低劳动强度,提高捡球效率,提升踢球体验。
技术研发人员:刘大维,请求不公布姓名,吴紫泰,谭江辉,李逸飞,杨茜
受保护的技术使用者:广东技术师范大学
技术研发日:20221203
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!