固定式四点位料箱夹具及机器人的制作方法
本技术涉及智能机器人,具体地,涉及一种固定式四点位料箱夹具及机器人。
背景技术:
1、机器人,是一种具备了传感器、物镜和电子光学系统的智能设备,可以快速进行货物分拣和搬运。
2、越来越多的3d视觉、力传感器会使用到机器人上,机器人将会变得越来越智能化。随着传感与识别系统、人工智能等技术进步,机器人从被单向控制向自己存储、自己应用数据方向发展,逐渐信息化。
3、当分拣机器人在不同应用场景时,常常需要装配不同的夹具,常用的夹具包括吸盘和抓手。但是在对一些框式的料箱等大体积物品进行分拣时,单一吸盘或抓手均无法实现稳定的抓起且容易在抓取的过程在引起有些塑料材质物品的变形,而且不稳定抓取时,常常会随着机器人的移动发生脱落现象,因此需要一种新型的夹具来解决这些问题。
技术实现思路
1、针对现有技术中的缺陷,本实用新型的目的是提供一种固定式四点位料箱夹具及机器人。
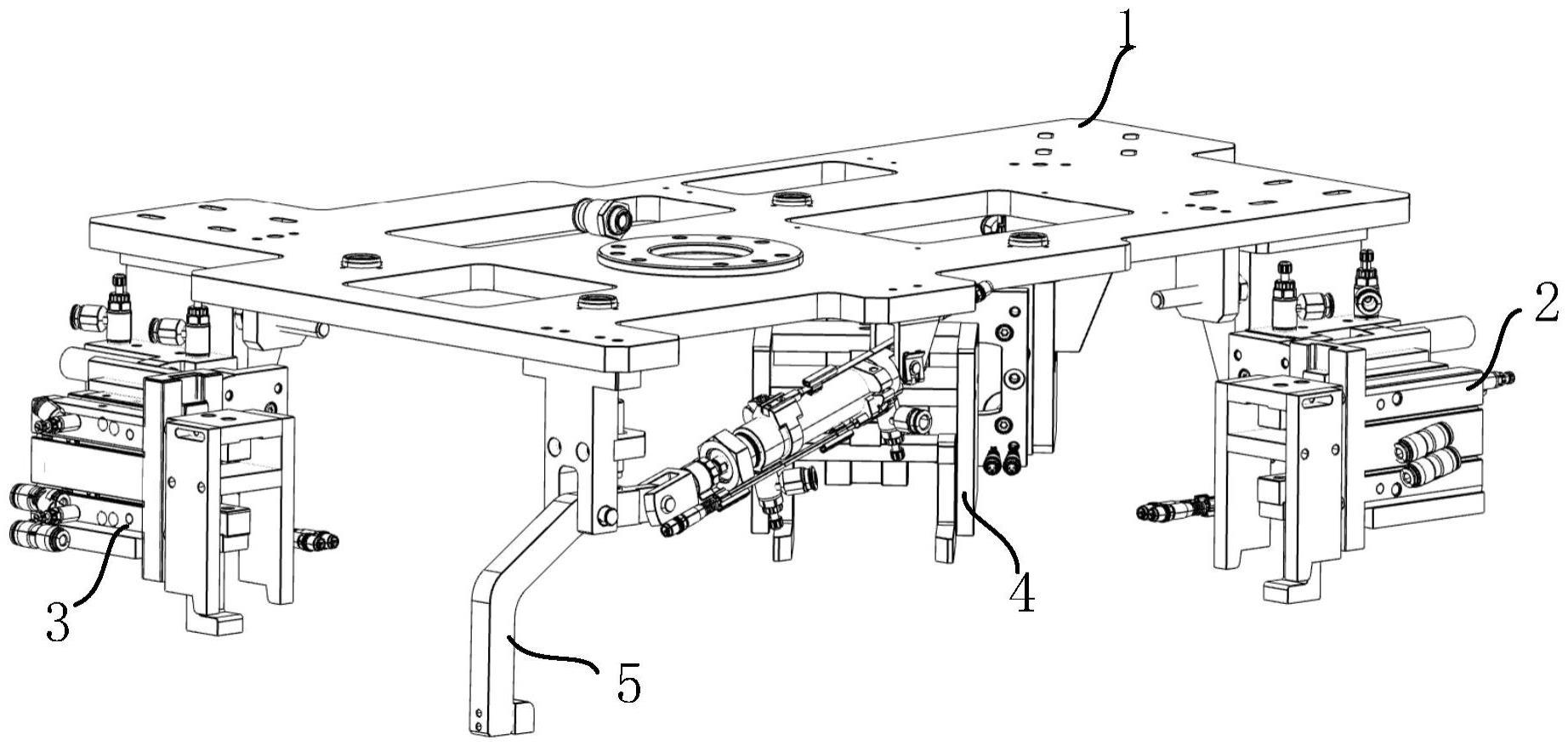
2、根据本实用新型提供的固定式四点位料箱夹具,包括:
3、夹具支架;
4、第一夹具组,包括若干个第一夹具单元,每一所述第一夹具单元位于所述夹具支架不同的侧边框上,第一夹具单元用于对所述目标料箱进行定位并夹持目标料箱的侧边框;
5、第二夹具组,包括若干个第二夹具单元,每一所述第二夹具单元位于所述夹具支架不同的侧边框上,第二夹具单元用于夹持目标料箱至少一侧边框,以将所述目标料箱夹起。
6、优选地,所述第一夹具组包括第一夹具单元a和第一夹具单元b;
7、所述第一夹具单元a和所述第一夹具单元b分别位于所述夹具支架相对的两个对端上;
8、所述第一夹具单元a,用于夹持目标料箱的第一侧边框;
9、所述第一夹具单元b,用于夹持目标料箱上与所述第一侧边框相邻的第二侧边框或与所述第一侧边框相对的第三侧边框。
10、优选地,所述第一夹具单元包括第一滑台气缸、第一手指气缸、第一气缸支架、第一夹持件以及第二夹持件;
11、所述第一滑台气缸通过所述第一气缸支架固定在所述夹具支架上,所述第一滑台气缸上设置有第一移动滑台;所述手指气缸安装在所述第一移动滑台上,能够在所述第一滑台气缸的驱动下进行远离或靠近所述目标料箱的运动;
12、所述第一手指气缸包括第一输出杆和第二输出杆,所述第一夹持件设置在所述第一输出杆上,所述第二夹持件设置在所述第二输出杆上,所述第一手指气缸,用于驱动所述第一夹持件以及第二夹持件相向或相背运动,以进行所述目标料箱的夹持或释放操作。
13、优选地,所述第二夹具组包括第二夹具单元a和第二夹具单元b;
14、所述第二夹具单元a和所述第二夹具单元b分别位于所述夹具支架相对的两个对端上;
15、所述第二夹具单元a,用于夹持目标料箱上第一角端的两侧边框;
16、所述第二夹具单元b,用于夹持目标料箱与所述第一侧边框相对的第三侧边框或与所述第一角端相对的的二角端的两侧边框。
17、优选地,所述第二夹具单元a包括第二滑台气缸、第二手指气缸、第二气缸支架、第三夹持件以及第四夹持件;
18、所述第二滑台气缸通过所述第二气缸支架固定在所述夹具支架上,所述第二滑台气缸上设置有第二移动滑台;所述第二手指气缸安装在所述第二移动滑台上,能够在所述第二滑台气缸的驱动下进行远离或靠近所述目标料箱的运动;
19、所述第二手指气缸包括第三输出杆和第四输出杆,所述第三夹持件设置在所述第三输出杆上,所述第四夹持件设置在所述第四输出杆上;
20、所述第三夹持件包括一体设置的第一夹持杆和第二夹持杆;所述第四夹持件包括一体设置的第一夹持片和第二夹持片;所述第一夹持杆,用于配合所述第一夹持片进行所述目标料箱一侧框的夹持,所述第二夹持杆,用于配合所述第二夹持片进行所述目标料箱另一侧框的夹持;
21、所述第二手指气缸,用于驱动所述第三夹持件以及第四夹持件相向或相背运动,以进行所述目标料箱的夹持或释放操作。
22、优选地,所述第二夹具单元b包括驱动气缸、第一安装支架、第二安装支架以及卡持件;
23、所述第一安装支架固定连接所述夹具支架;
24、所述卡持件通过转轴连接所述第一安装支架的末端,能够沿所述转轴的轴线转动;
25、所述驱动气缸的一端通过所述第二安装支架连接所述夹具支架,另一端通过所述驱动气缸的输出轴与所述卡持件的一端铰接;
26、所述驱动气缸,用于驱动所述卡持件在所述第一安装支架的末端转动,以使所述卡持件的另一端进行远离或靠近所述目标料箱的运动以进行所述目标料箱的卡持或释放操作。
27、优选地,所述第一夹持杆和所述第二夹持杆通过第一连接板形成一体结构;
28、所述第一连接板固定在所述第二手指气缸的第三输出杆上。
29、优选地,所述第一夹持片和所述第二夹持片通过第二连接板形成一体结构;
30、所述第二连接板固定在所述第二手指气缸的第四输出杆上。
31、优选地,所述第一夹具单元a和所述第一夹具单元b采用相同类型的夹具单元或不同类型的夹具单元;
32、所述第二夹具单元a和所述第二夹具单元b采用相同类型的夹具单元或不同类型的夹具单元。
33、本实用新型提供的机器人,包括所述的固定式四点位料箱夹具,还包括机械臂;
34、所述固定式四点位料箱夹具设置在所述机械臂的末端。
35、与现有技术相比,本实用新型具有如下的有益效果:
36、本实用新型中通过在夹具支架设置第一夹具组和第二夹具组,通过第一夹具组中的两个第一夹具单元对目标料箱进行定位,通过第二夹具组中的两个第二夹具单元配合第一夹具单元将目标料箱夹起,避免了单一吸盘或抓手均无法实现稳定的抓起且容易在抓取的过程在引起有些物品的变形的问题,实现目标料箱的稳定抓取;
37、本实用新型中通过第二夹具组中的一第二夹具单元对待夹持目标料箱角端的两侧边框同时进行夹持,避免目标料箱在夹持过程中的滑动,实现目标料箱的稳定抓取。
技术特征:
1.一种固定式四点位料箱夹具,其特征在于,包括:
2.根据权利要求1所述的固定式四点位料箱夹具,其特征在于,所述第一夹具组包括第一夹具单元a和第一夹具单元b;
3.根据权利要求1所述的固定式四点位料箱夹具,其特征在于,所述第一夹具单元包括第一滑台气缸、第一手指气缸、第一气缸支架、第一夹持件以及第二夹持件;
4.根据权利要求2所述的固定式四点位料箱夹具,其特征在于,所述第二夹具组包括第二夹具单元a和第二夹具单元b;
5.根据权利要求4所述的固定式四点位料箱夹具,其特征在于,所述第二夹具单元a包括第二滑台气缸、第二手指气缸、第二气缸支架、第三夹持件以及第四夹持件;
6.根据权利要求4所述的固定式四点位料箱夹具,其特征在于,所述第二夹具单元b包括驱动气缸、第一安装支架、第二安装支架以及卡持件;
7.根据权利要求5所述的固定式四点位料箱夹具,其特征在于,所述第一夹持杆和所述第二夹持杆通过第一连接板形成一体结构;
8.根据权利要求5所述的固定式四点位料箱夹具,其特征在于,所述第一夹持片和所述第二夹持片通过第二连接板形成一体结构;
9.根据权利要求4所述的固定式四点位料箱夹具,其特征在于,所述第一夹具单元a和所述第一夹具单元b采用相同类型的夹具单元或不同类型的夹具单元;
10.一种机器人,其特征在于,包括权利要求1至9任一项所述的固定式四点位料箱夹具,还包括机械臂;
技术总结
本技术提供了一种固定式四点位料箱夹具及机器人,包括:夹具支架;第一夹具组,包括若干个第一夹具单元,每一第一夹具单元位于夹具支架不同的侧边框上,第一夹具单元用于对目标料箱进行定位并夹持目标料箱的侧边框;第二夹具组,包括若干个第二夹具单元,每一第二夹具单元位于夹具支架不同的侧边框上,第二夹具单元用于夹持目标料箱至少一侧边框,以将目标料箱夹起。本技术中通过在夹具支架设置第一夹具组和第二夹具组,通过第一夹具组中的两个第一夹具单元对目标料箱进行定位,通过第二夹具组中的两个第二夹具单元配合第一夹具单元将目标料箱夹起,避免了单一吸盘或抓手均无法实现稳定的抓起且容易在抓取的过程在引起有些物品的变形的问题。
技术研发人员:魏明哲,王楠楠,张明
受保护的技术使用者:星猿哲科技(上海)有限公司
技术研发日:20221205
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!