一种多轴关节机械臂的制作方法
本技术涉及机械臂,具体为一种多轴关节机械臂。
背景技术:
1、随着制造业的飞速发展,机器人作为高新产业也发展迅速,其应用场景不断扩大。例如:在机器人上安装视觉传感器,根据视觉传感器获取的视觉信息帮助机器人对外界环境进行检测、判断、识别、测量等,使得机器人可执行更加复杂、智能的任务,因此机器人的机械臂需要具备更高的灵活性和实用性。
2、现经过本发明人检索发现授公告号为:cn208468359u的中国实用新型专利,其公开了一种十轴移动视觉机器人,该十轴移动视觉机器人,通过全方位移动的平台、旋转机构、升降机构和机械臂相结合,可使得本实用新型可移动到任意待检测的位置处,脱离生产线的约束,实现智能化,灵活性强;在机械臂上设置视觉系统和检测仪器,通过视觉系统观测工件情况并将信号反馈给控制系统,通过控制系统控制机械臂移动取件并通过检测仪器检测工件,从而达到工件的智能检测,避免了人工检测的误差,提高精准度,适用性强,能够应用于各种不同的环境的目的。
3、上述的一种十轴移动视觉机器人虽然解决了现有装置使用时大尺寸零件的最终检测不能放入设备中,只能人工检测,由于人工的操作每次都不同,无法实现重复性,导致检测准确性无法保证的影响问题,但在该十轴移动视觉机器人中,需要制备稳定结构,通过在机械臂轴关节处增加稳定结构,达到减小机械臂转动时产生的摩擦的目的,该种检测方法要求稳定结构与机械臂之间紧密结合,这就导致了在使用前,需要重新制备稳定结构,致使检测过程耗时久,难度较大,机械臂的稳定性降低,使用时存在一定的不便。
技术实现思路
1、本实用新型的目的是克服现有技术存在检测过程耗时久,难度较大,机械臂的稳定性降低,使用时存在一定的不便的技术问题,提供了一种多轴关节机械臂,该多轴关节机械臂具有提高稳定性,应用方便快捷的优点。
2、为实现上述目的,本实用新型提供如下技术方案:
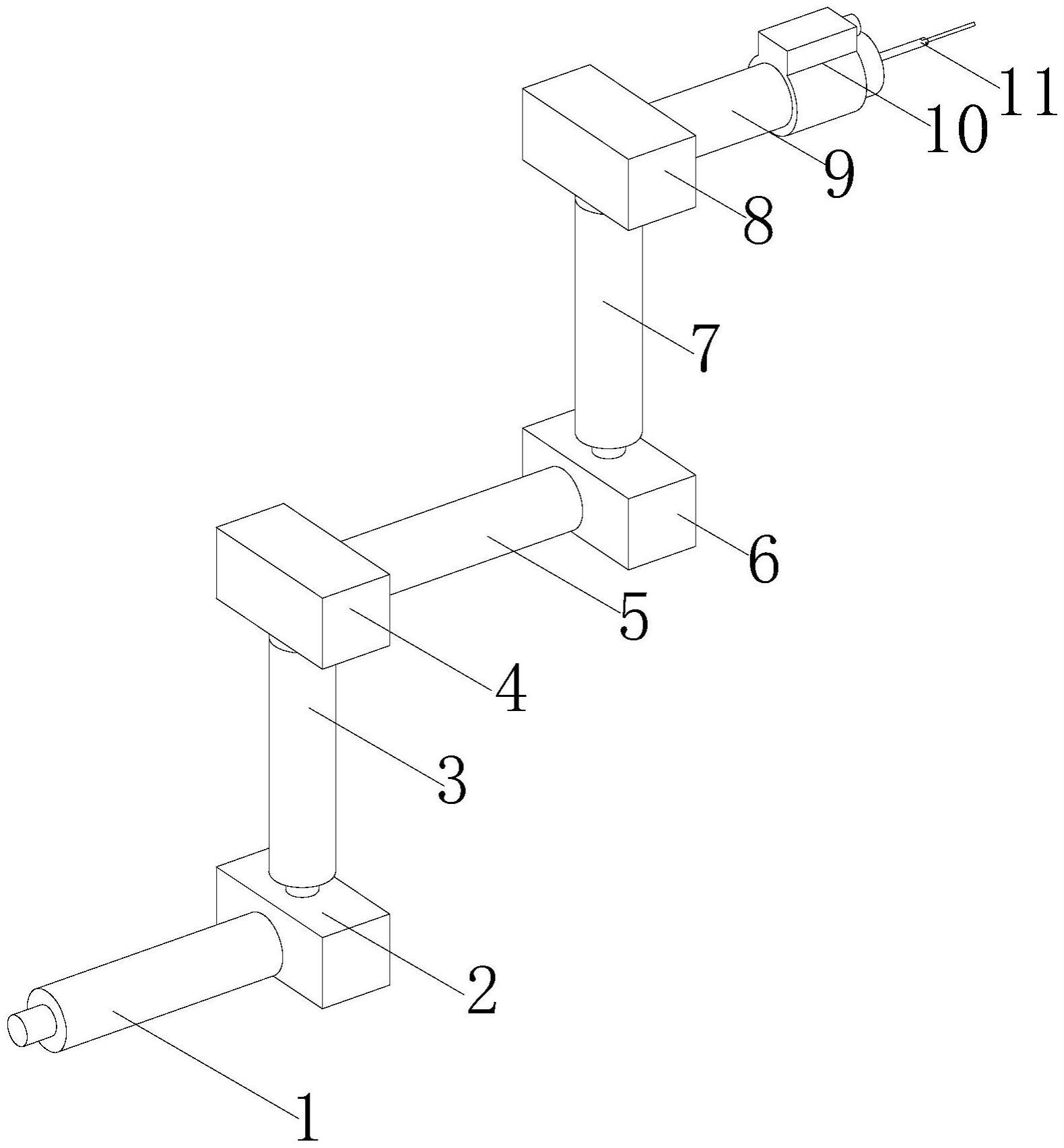
3、一种多轴关节机械臂,包括:
4、第一机械臂,所述第一机械臂整体呈圆柱形结构;
5、第一连接体,所述第一连接体安装在第一机械臂的右端;
6、第二机械臂,所述第二机械臂安装在第一连接体的上端;
7、第二连接体,所述第二连接体安装在第二机械臂的顶端;
8、第三机械臂,所述第三机械臂安装在第二连接体的右侧;
9、第三连接体,所述第三连接体安装在第三机械臂的右端;
10、第四机械臂,所述第四机械臂安装在第三连接体的顶端;
11、第四连接体,所述第四连接体安装在第四机械臂的顶端;
12、第五机械臂,所述第五机械臂安装在第四连接体的右端;
13、相机,所述相机安装在第五机械臂的外侧;
14、检测仪,所述检测仪安装在第五机械臂的末端。
15、优选的,所述第一机械臂包括:
16、第一连接柱,所述第一连接柱的右端连接有机械臂外壳;
17、第二连接柱,所述第二连接柱连接在机械臂外壳的右端;
18、第一伺服电机,所述第一伺服电机安装在机械臂外壳的内部,且第一伺服电机的内部安装有第一轴承马达;
19、连接盘,所述连接盘连接在第一伺服电机的右侧,且连接盘的右侧连接有第一转轴;
20、转轴外套,所述转轴外套安装在第一转轴的外侧,且转轴外套的外侧安装有减速机。
21、优选的,所述第二机械臂包括:
22、第三连接柱,所述第三连接柱的顶端连接有机械臂外壳。
23、优选的,所述第一连接体包括:
24、第二伺服电机,所述第二伺服电机的内部安装有第二轴承马达,且第二伺服电机的顶部安装有制动器;
25、第二转轴,所述第二转轴连接在第二伺服电机的后侧;
26、制动杆,所述制动杆连接在制动器的后侧。
27、优选的,所述第二转轴的外侧转动连接有第二连接柱和第三连接柱,所述第三连接柱设置在第二连接柱的后侧。
28、优选的,所述相机包括:
29、机体,所述机体的底部连接有连接环,且机体的前侧安装有摄像头。
30、优选的,所述连接环的内侧与第五机械臂的外侧连接。
31、优选的,所述检测仪包括:
32、检测杆,所述检测杆的末端转动连接有连接轴;
33、检测头,所述检测头连接在连接轴的外侧。
34、与现有技术相比,本实用新型的有益效果是:
35、1、该多轴关节机械臂,通过第一连接体的设置,机械臂在运转的过程中,第二连接柱和第三连接柱绕着第二转轴旋转实现检测距离和检测位置的改变,机械臂在活动时轴关节的摩擦易产生磨损,同时摩擦造成的震动易影响手臂稳定性,第二伺服电机和制动器的设置,能够调整和制动第二转轴的旋转,从而减小摩擦,进而可以保护机械臂的安全性,提高使用寿命;
36、2、该多轴关节机械臂,通过第五机械臂端部设置的相机和检测仪,能够清楚观察到零部件的情况并进行检测,检测头绕着检测杆旋转,增大检测的范围,使装置的实用性更强,使用效率高。
技术特征:
1.一种多轴关节机械臂,其特征在于,包括:
2.根据权利要求1所述的一种多轴关节机械臂,其特征在于:
3.根据权利要求1所述的一种多轴关节机械臂,其特征在于:
4.根据权利要求1所述的一种多轴关节机械臂,其特征在于:
5.根据权利要求4所述的一种多轴关节机械臂,其特征在于:所述第二转轴(203)的外侧转动连接有第二连接柱(103)和第三连接柱(301),所述第三连接柱(301)设置在第二连接柱(103)的后侧。
6.根据权利要求1所述的一种多轴关节机械臂,其特征在于:
7.根据权利要求6所述的一种多轴关节机械臂,其特征在于:所述连接环(1002)的内侧与第五机械臂(9)的外侧连接。
8.根据权利要求6所述的一种多轴关节机械臂,其特征在于:
技术总结
本技术公开了一种多轴关节机械臂,涉及机械臂技术领域,包括:第一机械臂,所述机械臂整体呈圆柱形结构;第一连接体,所述第一连接体安装在第一机械臂的右端;第二机械臂,所述第二机械臂安装在第一连接体的上端;第二连接体,所述第二连接体安装在第二机械臂的顶端;第三机械臂,所述第三机械臂安装在第二连接体的右侧;第三连接体,所述第三连接体安装在第三机械臂的右端。通过第一连接体的设置,机械臂在运转的过程中,第二连接柱和第三连接柱绕着第二转轴旋转实现检测距离和检测位置的改变,机械臂在活动时轴关节的摩擦易产生磨损,同时摩擦造成的震动易影响手臂稳定性。
技术研发人员:柯胜飞,唐飞,张斌鑫
受保护的技术使用者:杭州映图智能科技有限公司
技术研发日:20221205
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!