一种用于自动加油机器人加油枪抓持及操纵机构的制作方法
本技术涉及自动加油,具体涉及一种用于自动加油机器人加油枪抓持及操纵机构。
背景技术:
1、目前的自动加油技术的加油夹爪结构主要分为两种:第一种,加油枪与夹爪不可分离,加油枪固定在夹爪上对车辆进行加油,这种结构形式为一个机械臂(或动力源)只能对应一把加油枪,因为通常一台加油机上会有2~3种油品,对应2~3把加油枪,这样一对一的方式造成机械臂的利用率不高;第二种,夹爪从加油机上抓枪,但加油过程中夹爪不可脱离开加油枪,这种结构形式为一个机械臂虽然可以兼顾加油机单侧2~3把加油枪,但市面上加油机多数是一机两面的,机械臂在加油机一侧给一辆车加油的时候,由于夹爪不能与加油枪脱离开,所以不能同时给加油机另一侧的车辆加油,这样也会降低机械臂的利用。而且第二种结构形式的夹爪在加油枪上的抓取部位是手柄或者加油枪主阀壳体部位,这两个部位形状不很规则,抓取容易偏离初始位置,很难保证每次抓枪都在同一位置,影响后续加油动作的精度。
2、因此,亟待一种完全脱离加油枪的用于自动加油机器人加油枪抓持及操纵机构,以能够应对多辆车的加油,从而提高加油速度。
技术实现思路
1、本实用新型的目的是针对现有技术中存在的上述问题,提供了一种用于自动加油机器人加油枪抓持及操纵机构。
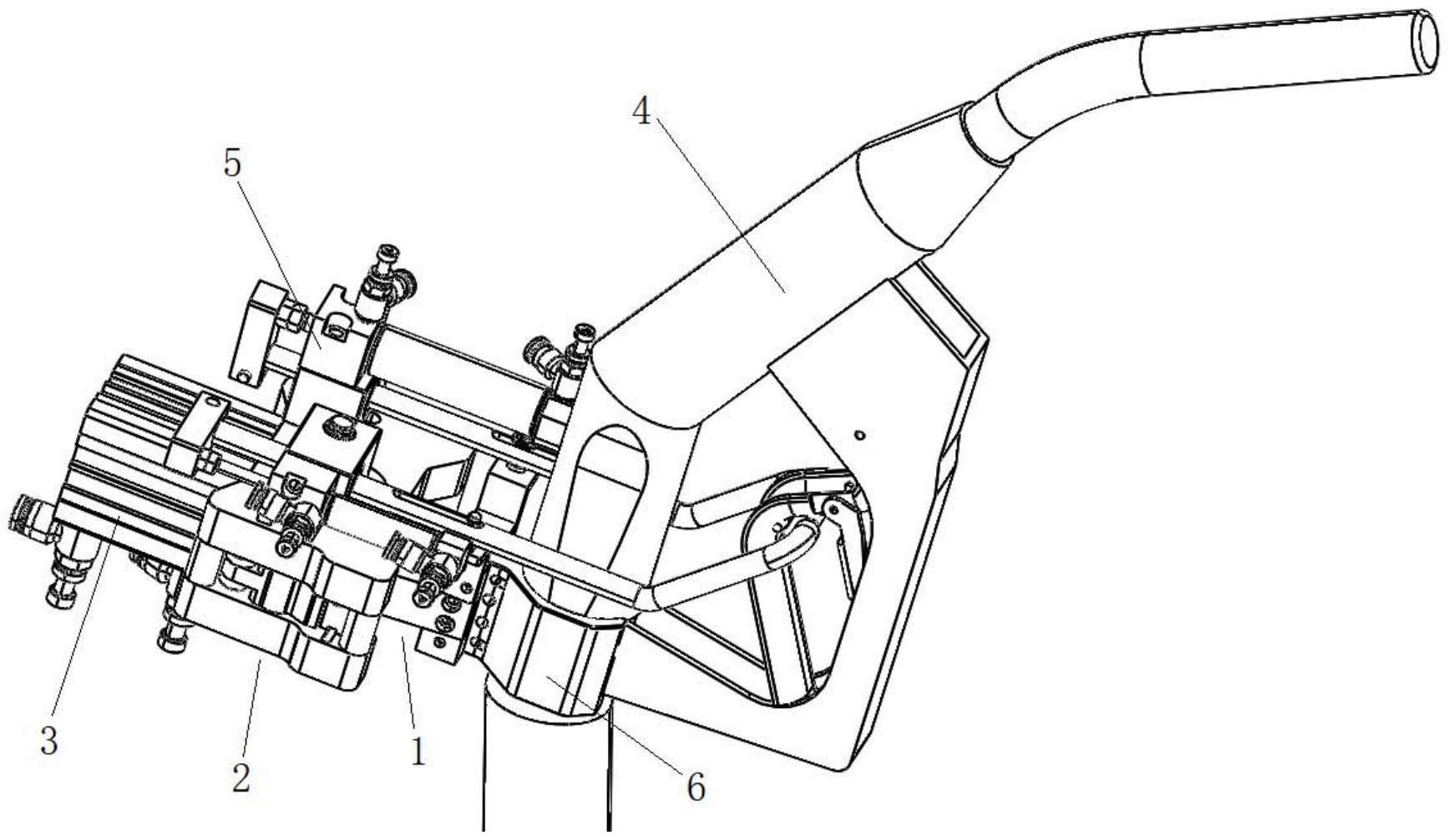
2、为了实现上述实用新型目的,本实用新型采用了以下技术方案:一种用于自动加油机器人加油枪抓持及操纵机构包括油枪夹持机构、用于通过传动结构连接并驱动油枪夹持机构松开和夹紧的第一驱动器、用于扳动加油枪的扳机进行加油的扳动机构以及与油枪夹持机构配合的两个油枪抱箍;
3、两个油枪抱箍固连于加油枪上,油枪夹持机构通过松开和夹紧两个油枪抱箍实现对加油枪的松开和夹紧;
4、扳动机构设于传动结构上,并与油枪夹持机构位于不同平面,以实现分别对加油枪进行夹持和松开以及扳动扳机操作;
5、扳动机构与油枪夹持机构活动连接,以使得扳动机构能够随油枪夹持机构张开和合拢。
6、工作原理及有益效果:1、与现有技术相比,本申请不再固定加油枪,可以分离加油枪对其他加油枪进行操作,因此可以按所需加油的油品抓取对应的加油枪,也能够实现在给一辆车加油的时候,夹爪可锁紧加油枪,从而实现加油过程中夹爪可与加油枪脱开,在加油机另一侧车辆有加油需求时可同时对其进行加油操作;
7、2、与现有技术相比,本申请将油枪夹持机构和扳动机构分离,但是两者还能够进行联动操作,结构紧凑,能够在油枪夹持机构夹紧加油枪时(油枪夹持机构夹紧两个油枪抱箍的端部),扳动机构能够插入到加油枪扳机的对应空隙中,还能够在油枪夹持机构松开加油枪时(油枪夹持机构松开两个油枪抱箍的端部),扳动机构能够随之从加油枪扳机的对应空隙中脱离并随着油枪夹持机构撑开,以实现对加油枪的松开操作,而且只要油枪夹持机构能够正确夹住加油枪(此部分可通过目前现有的图像识别技术来进行定位,由于不是本申请的保护点所在因此不再赘述如何定位),那么扳动机构就能够准确地进入到加油枪扳机的对应空隙中;
8、3、由于两个油枪抱箍预先设于加油枪上,可以起到辅助定位的作用,方便油枪夹持机构进行定位,从而保证了每次抓取加油枪的一致性。
9、进一步地,油枪夹持机构包括连接该油枪抱箍和传动结构的齿条夹臂和与该齿条夹臂连接的夹头,通过夹头对油枪抱箍的端部进行夹持和松开操作。通过传动结构来驱动齿条夹臂实现两个夹头的分开和靠拢,以实现对加油枪的夹紧和松开操作。
10、进一步地,传动结构包括与第一驱动器连接的上下两个固定板、设于两个固定板之间的连杆、用于连接连杆和第一驱动器的输出端的连接件以及连接连杆远离连接件一端的扇形齿轮,扇形齿轮分别与上下两个固定板转动连接并与齿条夹臂啮合。第一驱动器的输出端随着第一驱动器工作进行伸缩,从而通过连接件带动连杆,连杆带动扇形齿轮转动,从而驱动两个齿条夹臂互相靠近或远离,结构紧凑。
11、进一步地,扳动机构包括用于扳动加油枪的扳机的拉杆、用于锁住加油枪的扳机的推杆、用于驱动推杆运动的第二驱动器、用于驱动拉杆运动的第三驱动器以及用于将拉杆、推杆、第一驱动器以及第二驱动器安装于其中一个固定板上的轴承座。拉杆在第三驱动器的驱动下扳动加油枪的扳机,而推杆在第二驱动器的驱动下推动推动加油枪挡板卡住加油枪的扳机(因为加油枪本身就设有一块带齿的铁片,可以卡住挡板)。
12、进一步地,拉杆和推杆上均设有滑槽,且均通过滑槽和拉杆销与夹头的拉杆销座连接,拉杆和推杆分别对应一个拉杆销座。此设置,通过拉杆销和滑槽的配合实现拉杆、推杆与齿条夹臂的联动,实现难度低。
13、进一步地,拉杆的滑槽和推杆上的滑槽距离轴承座的位置不同。目的在于使得推杆和拉杆的运动轨迹不同。
14、进一步地,轴承座通过转动销连接固定板。
15、进一步地,第一驱动器为气缸或电缸。
16、进一步地,第二驱动器和第三驱动器均为笔型气缸或笔型电缸。
17、进一步地,上下两个固定板通过隔套隔开,以供传动结构安装。
技术特征:
1.一种用于自动加油机器人加油枪抓持及操纵机构,其特征在于,包括油枪夹持机构、用于通过传动结构连接并驱动所述油枪夹持机构松开和夹紧的第一驱动器、用于扳动所述加油枪的扳机进行加油的扳动机构以及与所述油枪夹持机构配合的两个油枪抱箍;
2.根据权利要求1所述的一种用于自动加油机器人加油枪抓持及操纵机构,其特征在于,所述油枪夹持机构包括连接该油枪抱箍和所述传动结构的齿条夹臂和与该齿条夹臂连接的夹头,通过所述夹头对所述油枪抱箍进行夹持和松开操作。
3.根据权利要求2所述的一种用于自动加油机器人加油枪抓持及操纵机构,其特征在于,所述传动结构包括与所述第一驱动器连接的上下两个固定板、设于两个所述固定板之间的连杆、用于连接连杆和所述第一驱动器的输出端的连接件以及连接所述连杆远离所述连接件一端的扇形齿轮,所述扇形齿轮分别与上下两个所述固定板转动连接并与所述齿条夹臂啮合。
4.根据权利要求3所述的一种用于自动加油机器人加油枪抓持及操纵机构,其特征在于,所述扳动机构包括用于扳动所述加油枪的扳机的拉杆、用于锁住所述加油枪的扳机的推杆、用于驱动所述推杆运动的第二驱动器、用于驱动所述拉杆运动的第三驱动器以及用于将所述拉杆、所述推杆、所述第一驱动器以及所述第二驱动器安装于其中一个所述固定板上的轴承座。
5.根据权利要求4所述的一种用于自动加油机器人加油枪抓持及操纵机构,其特征在于,所述拉杆和所述推杆上均设有滑槽,且均通过所述滑槽和拉杆销与夹头上的拉杆销座连接,所述拉杆和所述推杆分别对应一个所述拉杆销座。
6.根据权利要求5所述的一种用于自动加油机器人加油枪抓持及操纵机构,其特征在于,所述拉杆的滑槽和所述推杆上的滑槽距离所述轴承座的位置不同。
7.根据权利要求4所述的一种用于自动加油机器人加油枪抓持及操纵机构,其特征在于,所述轴承座通过转动销连接所述固定板。
8.根据权利要求1-7任意一项所述的一种用于自动加油机器人加油枪抓持及操纵机构,其特征在于,所述第一驱动器为气缸或电缸。
9.根据权利要求4-6任意一项所述的一种用于自动加油机器人加油枪抓持及操纵机构,其特征在于,所述第二驱动器和所述第三驱动器均为笔型气缸或笔型电缸。
10.根据权利要求3-7任意一项所述的一种用于自动加油机器人加油枪抓持及操纵机构,其特征在于,上下两个所述固定板通过隔套隔开,以供所述传动结构安装。
技术总结
本技术涉及一种用于自动加油机器人加油枪抓持及操纵机构,该方案包括油枪夹持机构、用于通过传动结构连接并驱动油枪夹持机构松开和夹紧的第一驱动器、用于扳动加油枪的扳机进行加油的扳动机构以及与油枪夹持机构配合的两个油枪抱箍;两个油枪抱箍固连于加油枪上,油枪夹持机构通过松开和夹紧两个油枪抱箍实现对加油枪的松开和夹紧;扳动机构设于传动结构上,并与油枪夹持机构位于不同平面,以实现分别对加油枪进行夹持和松开以及扳动扳机操作;扳动机构与油枪夹持机构活动连接。本申请能够将夹持和松开加油枪以及扳动加油枪的扳机的功能分开操作,从而实现对多个加油枪进行操作,提高了加油效率。
技术研发人员:施恒之
受保护的技术使用者:浙江驿公里智能科技有限公司
技术研发日:20221207
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!