三爪变刚度磁流变液机械手
本技术涉及一种机械手,尤其涉及一种通过磁流变伸缩囊控制的机械手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。现有的机械手基本上是抓握力度恒定,刚度不变,对于需夹取的物品比较脆弱,如果也采用以往的机械手,会对一些脆弱物品造成损伤。
技术实现思路
1、基于上述说明,本实用新型提出一种三爪变刚度磁流变液机械手,通过控制通过导电线圈电流大小,导电线圈周围磁场大小就可以控制,从而改变磁流变液状态,控制磁流变液流入和/或流出磁流变伸缩囊的磁流变液的多少,达到精确控制机械手力度的目的。弥补目前机械手抓握力度大,刚度不可变的现状,实现脆弱物品的抓握。
2、本实用新型所采用的技术方案如下:
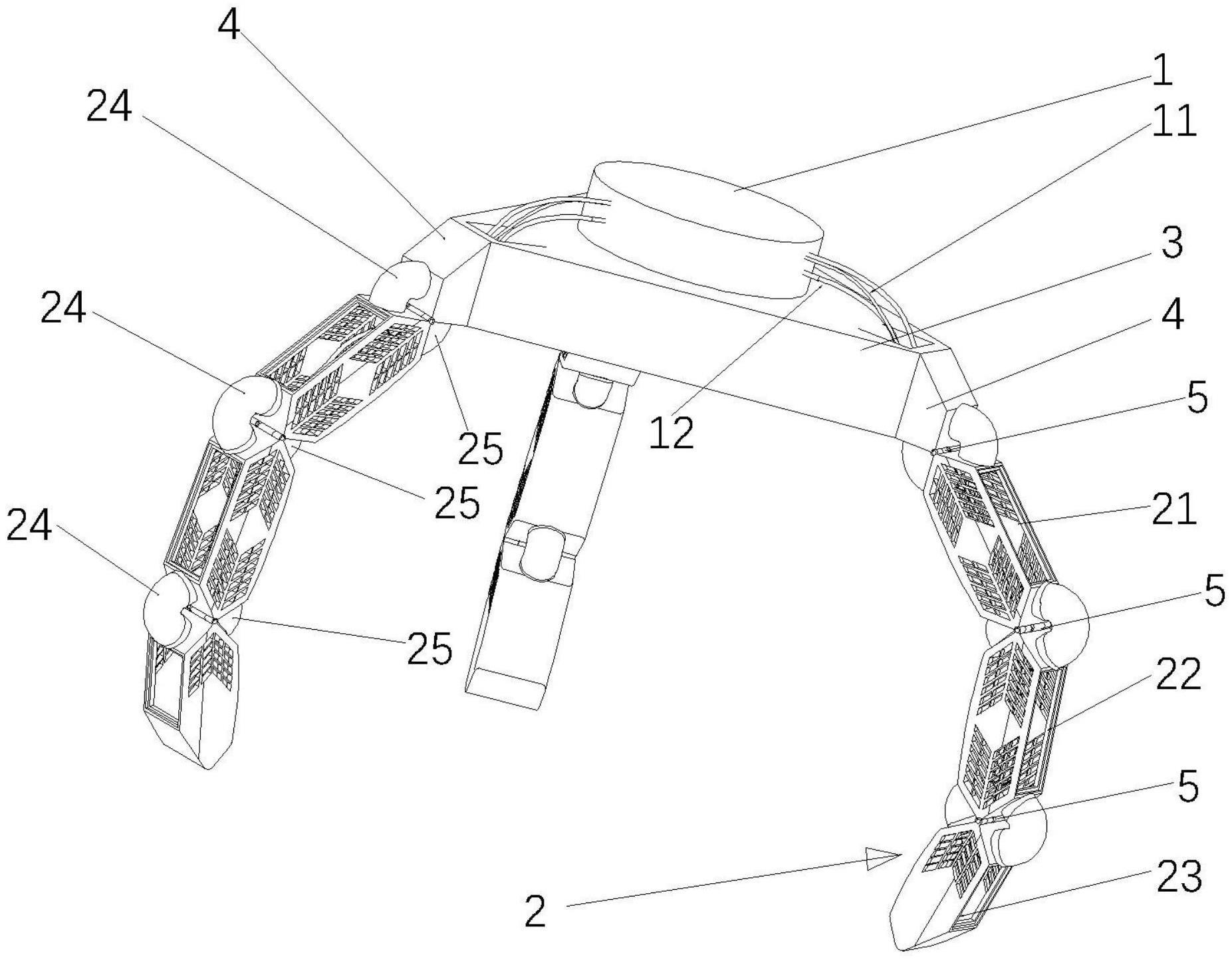
3、三爪变刚度磁流变液机械手,包括高压泵、若干个机械手和手掌;手掌四周均匀的安装有连接块,通过连接块将手掌与机械手连接;连接块一端与手掌的一边固定,连接块的另一端通过铰链与机械手活动连接;高压泵固定在手掌的上方;高压泵上设有导管和导线;导线穿过连接块,贯穿于机械手;导管内流着磁流变液;
4、机械手,包括第一指节、第二指节、第三指节、上磁流变伸缩囊和下磁流变伸缩囊;与连接块相连接的为第一指节;
5、各指节的首尾端通过铰链活动连接;各指节之间分别安装有上磁流变伸缩囊和下磁流变伸缩囊;即各指节之间的上部,首尾之间安装上磁流变伸缩囊;各指节之间的下部,首尾之间安装有下磁流变伸缩囊;导管,经过连接块贯穿于各指节之间,将各上磁流变伸缩囊和下磁流变伸缩囊相连通;
6、第一指节,与连接块之间安装有上磁流变伸缩囊和下磁流变伸缩囊;
7、第一指节和第二指节的上方的首部和尾部安装有电磁铁;在第三指节的上方的首部安装有电磁铁;
8、第一指节和第二指节的下方的首部和尾部安装有电磁铁,在第三指节的下方的首部安装有电磁铁;
9、导管穿过电磁铁。
10、进一步的,上磁流变伸缩囊和下磁流变伸缩囊的结构相同。
11、进一步的,电磁铁包括导磁体、导电线圈、隔磁筒和隔磁片;导管分别从导磁体的中间穿过连接上磁流变伸缩囊和下磁流变伸缩囊;导磁体上缠绕有导电线圈,导磁体的外侧套设隔磁筒,导磁体的上方和下方安装有隔磁片;导线连接各导电线圈,且各导电线圈供电导线相互独立。
12、进一步的,第一指节、第二指节的首部和尾部处呈网状栅格;第三指节的首部呈网状栅格。
13、进一步的,手掌呈六边形,机械手有三个,相间隔的固定在手掌的四周。
14、进一步的,第一指节、第二指节和第三指节的截面呈六边形。
15、进一步的,第一指节、第二指节的首尾部的上方和下方都开有凹槽,第三指节的首部的上方和下方开有凹槽;上磁流变伸缩囊的两端设有凸块,下磁流变伸缩囊的两端设有凸块;凸块与凹槽相配合,将上磁流变伸缩囊固定在第一指节、第二指节、第三指节的上方;将下磁流变伸缩囊固定在第一指节、第二指节、第三指节下方。
16、进一步的,第一指节的长度小于第二指节的长度。
17、本实用新型结构简单,可精确调控抓握力度,刚度可调的机械手,通过控制上磁流变液伸缩囊和下磁流变伸缩囊进出口磁流变液状态,控制磁流变液伸缩囊伸缩,达到精确驱动机械手的目的。各指节的首尾处有圆形凹槽,方便安装磁流变液伸缩囊,防止伸缩囊脱落。各指节安装电磁铁处两侧留有网状栅格,方便散热。导线安装在导管左侧4mm处,留有单独通道,防止导线与导管缠绕。
18、导电线圈与导磁体外围包裹有隔磁物质,防止磁场影响其他部分磁流变液工作。
19、导管与导线穿过各指节与指节旋转中心,只需预留少量导线与导管长度,防止指节工作时导线或导管被扯断。
20、各个线圈属于并联,方便控制电流大小,可以精确调控磁场大小。
21、连接块穿过导线与导管孔内有棱角处制作圆角,防止导线与导管磨损。
22、高压泵最大压力不能大于伸缩囊最大承受压力。
23、机械手放松时指节与指节应平行,第一指节与连接块安装伸缩囊的两个平面应垂直。
24、模仿人类手指形态,第三指节长度最短,且指节抓握面呈弧形,在抓握灵活前提下,可以适应不同形状的物体。
25、当磁流变液伸缩囊需要膨胀时,磁流变液进液口处的电磁铁不通电,磁流变液出液口处的电磁铁通电产生磁场,磁流变液受磁场作用其状态变为固体,磁流变液流出受阻,磁流变伸缩囊便会在内部磁流变液的作用下膨胀,通过控制电流大小可以控制磁流变伸缩囊进液端和出液端的磁流变液状态,从而控制磁流变伸缩囊膨胀程度。
26、当机械手不工作时,高压泵不工作,机械手手指处于放松状态。当机械手抓握时,手指上磁流变伸缩囊应膨胀,下磁流变流液伸缩囊缩小,此时,第三指节与第二指节连接处的上磁流变液伸缩囊储液口电磁铁工作,磁流变液流出受阻,其余各上磁流变液伸缩囊膨胀,手指弯曲。如需精确调节手指力度,可依次调节各下磁流变液伸缩囊的膨胀程度,来精确调控手指力度大小。
技术特征:
1.三爪变刚度磁流变液机械手,其特征在于包括高压泵、若干个机械手和手掌;所述的手掌四周均匀的安装有连接块,通过连接块将手掌与机械手连接;所述的连接块一端与手掌的一边固定,连接块的另一端通过铰链与机械手活动连接;所述的高压泵固定在所述的手掌的上方;所述的高压泵上设有导管和导线;导线穿过连接块,贯穿于机械手;导管内流着磁流变液;
2.根据权利要求1所述的三爪变刚度磁流变液机械手,其特征在于所述的上磁流变伸缩囊和下磁流变伸缩囊的结构相同。
3.根据权利要求1所述的三爪变刚度磁流变液机械手,其特征在于所述的电磁铁包括导磁体、导电线圈、隔磁筒和隔磁片;所述的导管分别从导磁体的中间穿过连接上磁流变伸缩囊和下磁流变伸缩囊;导磁体上缠绕有导电线圈,导磁体的外侧套设隔磁筒,导磁体的上方和下方安装有隔磁片;所述的导线连接各导电线圈,且各导电线圈的供电导线相互独立。
4.根据权利要求1所述的三爪变刚度磁流变液机械手,其特征在于所述的第一指节、第二指节的首部和尾部处呈网状栅格;第三指节的首部呈网状栅格。
5.根据权利要求1所述的三爪变刚度磁流变液机械手,其特征在于所述的手掌呈六边形,所述的机械手有三个,相间隔的固定在手掌的四周。
6.根据权利要求1所述的三爪变刚度磁流变液机械手,其特征在于所述的第一指节、第二指节和第三指节的截面呈六边形。
7.根据权利要求1所述的三爪变刚度磁流变液机械手,其特征在于所述的第一指节、第二指节的首尾部的上方和下方都开有凹槽,第三指节的首部的上方和下方开有凹槽;所述的上磁流变伸缩囊的两端设有凸块,所述的下磁流变伸缩囊的两端设有凸块;凸块与凹槽相配合,将上磁流变伸缩囊固定在第一指节、第二指节、第三指节的上方;将下磁流变伸缩囊固定在第一指节、第二指节、第三指节下方。
8.根据权利要求1所述的三爪变刚度磁流变液机械手,其特征在于所述的第一指节的长度小于第二指节的长度。
技术总结
本技术公开了一种三爪变刚度磁流变液机械手,包括高压泵、若干个机械手和手掌;通过连接块将手掌与机械手连接;连接块通过铰链与机械手活动连接;高压泵固定在手掌的上方;高压泵上设有导管和导线;导线和导管穿过连接块,贯穿于机械手;导管内流着磁流变液;机械手包括三个指节,通过铰链连接而成,各指节的上方首尾部和下方的首尾部安装有磁流变液伸缩囊,导管将各磁流变液伸缩囊相连通;在各指节的导管经过处的磁流变液伸缩囊的进口和出口处安装有电磁铁。本技术结构简单,可精确调控抓握力度,刚度可调的机械手,通过控制上磁流变液伸缩囊和下磁流变伸缩囊进出口磁流变液状态,控制磁流变液伸缩囊伸缩,达到精确驱动机械手的目的。
技术研发人员:袁玉宏,徐杭,欧阳青,汪浩江,黄宇飞,王少林,王硕
受保护的技术使用者:嘉兴学院
技术研发日:20221209
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!