一种用于高温金属抓取的二指夹板型机器人末端执行器的制作方法
本技术涉及机器人末端执行装置,特别涉及一种用于高温金属抓取的二指夹板型机器人末端执行器。
背景技术:
1、随着科技迅速发展,各行各业突飞猛进。机器人涉及机械、化工、食品、注塑等各大行业。由于制造业中存在很多种不同的产品,因此需要不同的机器人以及末端执行器来对某一特征的物体进行码垛、搬运等。所以,机器人末端执行器的存在不可或缺。
2、现阶段存在多种类型的末端执行器,有真空吸盘式、夹爪式、夹板式等。但是对于某些特殊工作要求的情况,大多数类型的机器人末端执行器不能够满足工作需要,这就需要一种特殊的末端执行器来完成特定的工作。例如:在一些机械加工厂需要将很粗的钢条等经过高温处理后进行折弯等二次加工,往往一个代加工的原始钢条重量可能在四五十公斤,为了满足后续的加工又会给代加工的钢条进行高温等处理,在处理过后往往是不能直接接触,传统机器人末端执行器是不能满足实际要求的,人工取放不仅大大增加员工的劳动强度、降低生产效率,还具有一定的危险性,这时就需要一种能够夹取条状高温金属的末端执行器来对物料进行搬运作业。这样不仅能够减少人员的参与,降低劳动强度,还能够大大提高工作效率,降低安全隐患。
技术实现思路
1、本实用新型的目的克服现有技术存在的不足,为实现以上目的,采用一种用于高温金属抓取的二指夹板型机器人末端执行器,以解决上述背景技术中提出的问题。
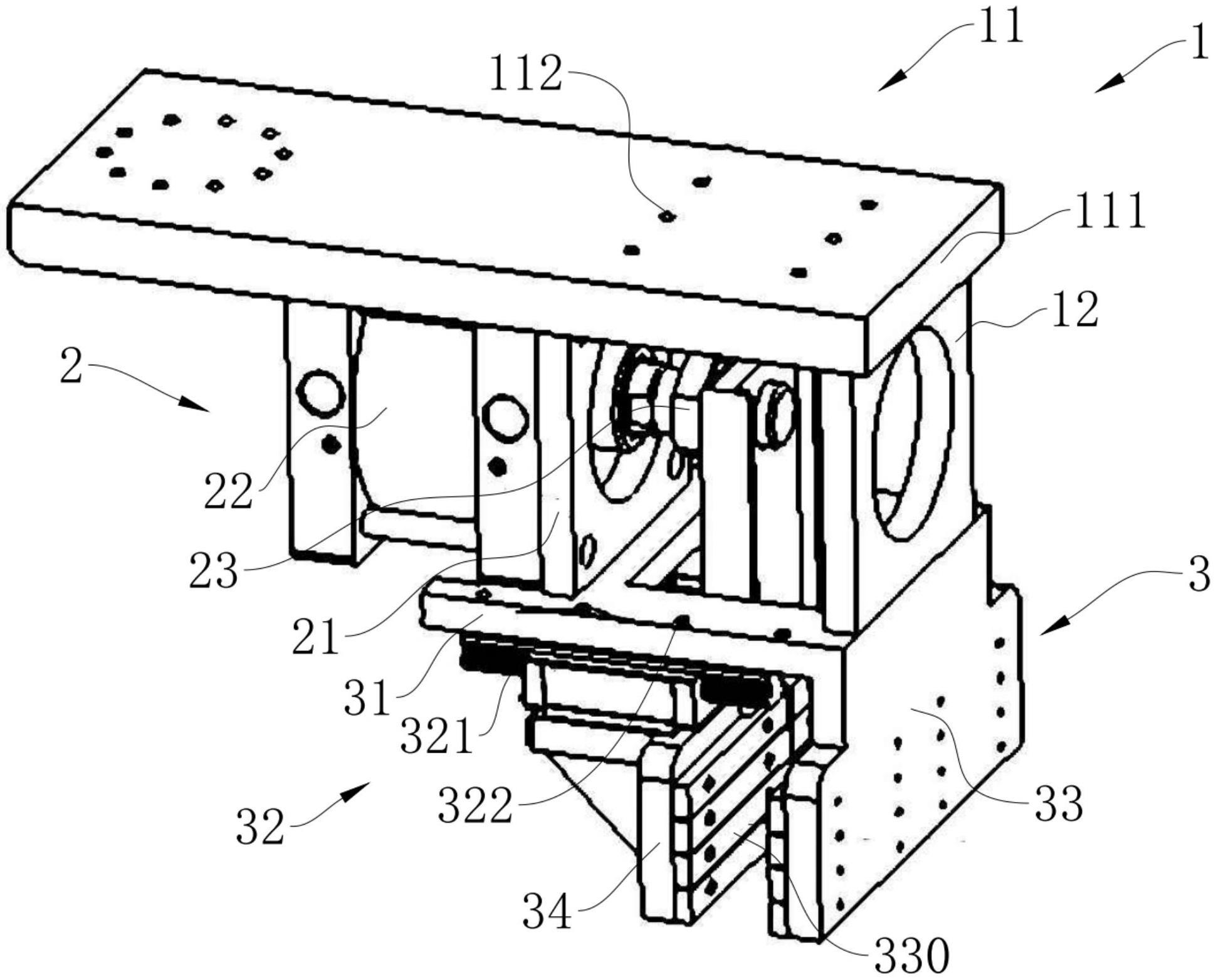
2、一种用于高温金属抓取的二指夹板型机器人末端执行器,包括:
3、固定组件,所述固定组件包括法兰组件,以及设置于法兰组件下端的固定夹板;
4、气缸组件,所述气缸组件通过气缸安装板设置于法兰组件下端;
5、夹持组件,所述夹持组件包括设置于气缸组件下端的导轨安装板、设置于导轨安装板的导轨组件、设置于导轨安装板延伸端的第一夹持部,以及可滑动式设置于导轨组件下端的第二夹持部,且所述第二夹持部连接于所述气缸组件活动端。
6、作为本实用新型的进一步的方案:所述法兰组件包括法兰板,以及设置于法兰板中间的过渡法兰板。
7、作为本实用新型的进一步的方案:所述固定夹板、导轨安装板、气缸安装板,以及过渡法兰板为焊接式一体结构。
8、作为本实用新型的进一步的方案:所述气缸组件包括气缸,以及设置于气缸活动端的连接杆。
9、作为本实用新型的进一步的方案:所述气缸采用大缸径式气缸。
10、作为本实用新型的进一步的方案:所述第二夹持部连接于所述连接杆。
11、作为本实用新型的进一步的方案:所述第一夹持部和第二夹持部的内侧面设置有耐高温铸铁式的防滑钳口。
12、作为本实用新型的进一步的方案:所述第一夹持部和第二夹持部的夹持力范围为2350n至14000n。
13、作为本实用新型的进一步的方案:所述防滑钳口的可承受最高温度为1000℃。
14、作为本实用新型的进一步的方案:所述导轨组件包括导轨,以及滑块螺母,所述导轨通过滑块螺母设置于导轨安装板。
15、与现有技术相比,本实用新型存在以下技术效果:
16、采用上述的技术方案,通过设置气缸组件、固定组件,以及夹持组件,利用一体化结构的固定组件固定气缸组件,并配合带动夹持组件,从而实现直线运动夹持加工件的功能。解决了普通末端执行器不能够完成夹取“高温金属”作业的问题,不仅能够减少人员的参与,降低劳动强度,还能够大大提高工作效率,降低安全隐患。
技术特征:
1.一种用于高温金属抓取的二指夹板型机器人末端执行器,其特征在于,包括:
2.根据权利要求1所述一种用于高温金属抓取的二指夹板型机器人末端执行器,其特征在于,所述法兰组件(11)包括法兰板(111),以及设置于法兰板中间的过渡法兰板(112)。
3.根据权利要求2所述一种用于高温金属抓取的二指夹板型机器人末端执行器,其特征在于,所述固定夹板、导轨安装板、气缸安装板,以及过渡法兰板为焊接式一体结构。
4.根据权利要求1所述一种用于高温金属抓取的二指夹板型机器人末端执行器,其特征在于,所述气缸组件包括气缸(22),以及设置于气缸活动端的连接杆(23)。
5.根据权利要求4所述一种用于高温金属抓取的二指夹板型机器人末端执行器,其特征在于,所述气缸采用大缸径式气缸。
6.根据权利要求4所述一种用于高温金属抓取的二指夹板型机器人末端执行器,其特征在于,所述第二夹持部连接于所述连接杆。
7.根据权利要求6所述一种用于高温金属抓取的二指夹板型机器人末端执行器,其特征在于,所述第一夹持部和第二夹持部的内侧面设置有耐高温铸铁式的防滑钳口(330)。
8.根据权利要求7所述一种用于高温金属抓取的二指夹板型机器人末端执行器,其特征在于,所述第一夹持部和第二夹持部的夹持力范围为2350n至14000n。
9.根据权利要求7所述一种用于高温金属抓取的二指夹板型机器人末端执行器,其特征在于,所述防滑钳口的可承受最高温度为1000℃。
10.根据权利要求1所述一种用于高温金属抓取的二指夹板型机器人末端执行器,其特征在于,所述导轨组件(32)包括导轨(321),以及滑块螺母(322),所述导轨通过滑块螺母设置于导轨安装板。
技术总结
本技术公开了一种用于高温金属抓取的二指夹板型机器人末端执行器,包括固定组件,所述固定组件包括法兰组件,以及设置于法兰组件下端的固定夹板;气缸组件,所述气缸组件通过气缸安装板设置于法兰组件下端;夹持组件,所述夹持组件包括设置于气缸组件下端的导轨安装板、设置于导轨安装板的导轨组件、设置于导轨安装板延伸端的第一夹持部,以及可滑动式设置于导轨组件下端的第二夹持部,且所述第二夹持部连接于所述气缸组件活动端。本技术通过设置固定组件、气缸组件,以及夹持组件,从而解决普通末端执行器不能够完成夹取“高温金属”作业的问题,提高工作效率,大大降低员工的劳动强度,降低危险系数。
技术研发人员:张少龙,李兰兰,徐家乐,洪立重,洪博
受保护的技术使用者:合肥汉特智能装备有限公司
技术研发日:20221212
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!