适用多种口径排水管道的树根切割作业机器人的制作方法
本技术涉及城市建设,具体地,涉及一种适用多种口径排水管道的树根切割作业机器人。
背景技术:
1、排水管道在投入使用数年后,由于外部荷载变化、管道内部腐蚀、管材和施工质量以及日常养护不到位等原因,造成管道出现不同程度的脱节、变形、破裂、错位、塌陷等结构性缺陷,而位于绿化带下方的管道在其接口处和破裂处会长出树根,形成功能性缺陷,若树根未能及时予以清除,在水分的滋养下越长越多,逐渐在管道中形成一个“滤网”,导致管道中塑料袋、卫生纸等垃圾一直堵在管道中,无法顺利排到污水处理厂。垃圾积累导致管道堵塞,进而污水溢出路面,严重影响居民日常生活,甚至造成地表水体溢流污染。为了修复管道中的树根缺陷问题,需要机器人进入排水管道中进行作业。
2、现有公开号为cn211915575u的中国专利,其公开了一种管道切割机器人,涉及管道切割装置领域,包括综合线缆连接头、机器人车体、摄像头及灯光模块、三自由度机械臂、钻切工作头、钻切刀片和驱动轮,所述机器人车体后部设有综合线缆连接头,所述综合线缆连接头通过综合电缆连接操控终端,所述机器人车体上安装有所述摄像头及灯光模块,所述机器人车体两侧安装有所述驱动轮,所述机器人车体前部通过所述三自由度机械臂连接高速的所述钻切工作头,所述钻切工作头上安装有所述钻切刀片来完成管道钻切。
3、发明人认为现有技术中的管道切割机器人只适用于单一口径的管道,在不同口径的管道中进行作业的适应性差且效率低,需要提供一种适用多种口径排水管道的树根切割作业机器人。
技术实现思路
1、针对现有技术中的缺陷,本实用新型的目的是提供一种适用多种口径排水管道的树根切割作业机器人。
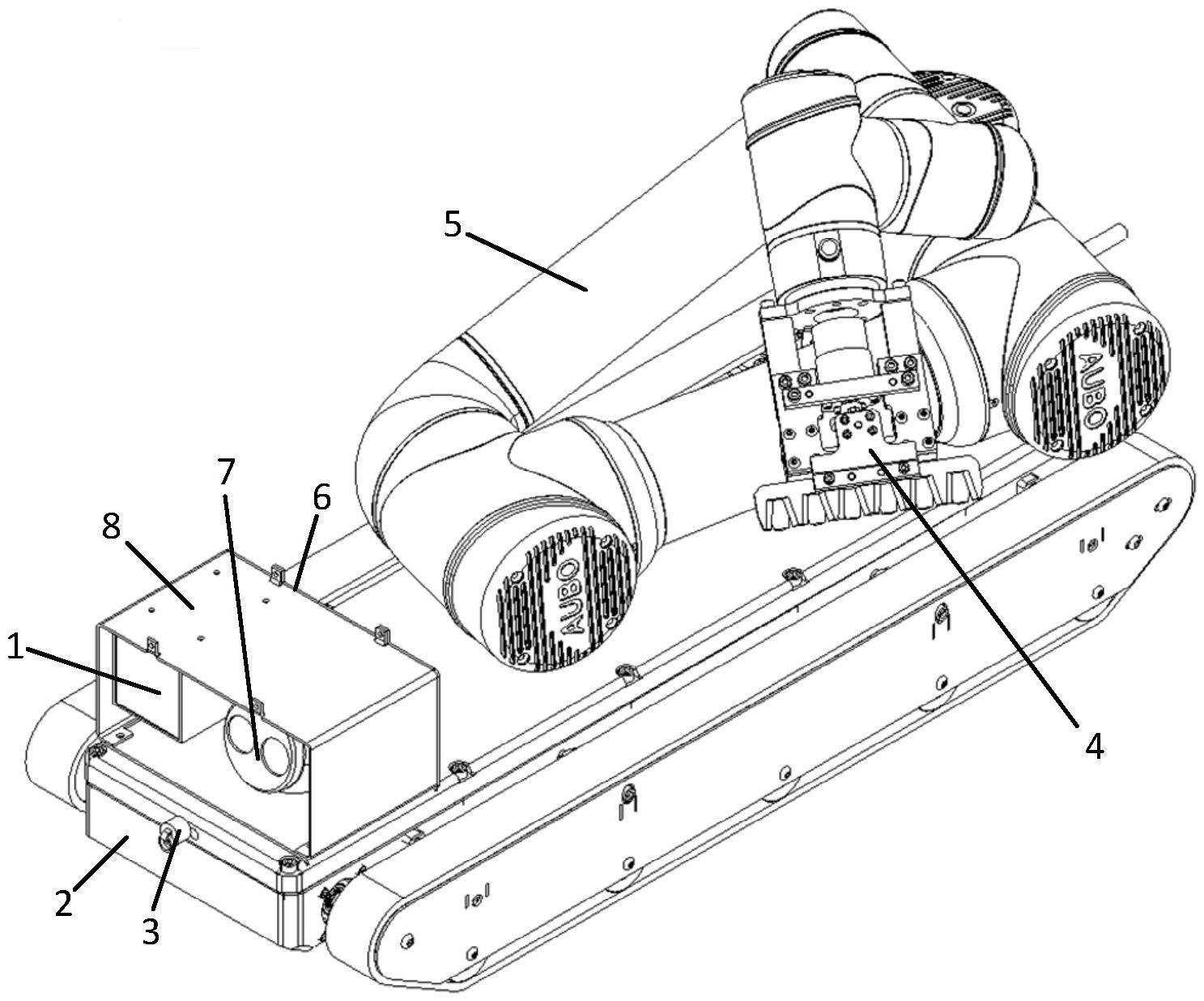
2、根据本实用新型提供的一种适用多种口径排水管道的树根切割作业机器人,包括:履带式底盘、六轴机械臂以及防护罩,所述履带式底盘包括车体、履带机构以及履带角度调节装置;所述防护罩紧固连接在所述车体的顶部,所述防护罩内部设置有激光雷达和摄像头;所述六轴机械臂一端与所述车体的顶部紧固连接,另一端紧固连接有往复式切割头;所述履带机构包括履带,所述履带内部设置有轮组,所述履带靠近所述车体的一侧设置有连接架,所述履带远离所述车体的一侧设置有挡板;所述车体的内部安装有驱动机构,所述驱动机构与所述轮组传动连接,所述轮组与所述履带传动连接;所述履带角度调节装置包括角度调节螺栓、角度调节板、关节螺丝、角度调节螺母以及刻度盘;所述关节螺丝与所述车体紧固连接,所述角度调节螺母与所述关节螺丝紧固连接;所述角度调节螺栓的一端与所述角度调节螺母通过螺纹配合连接,另一端与所述角度调节板紧固连接;所述角度调节板与所述连接架紧固连接;所述刻度盘与所述车体紧固连接。
3、优选地,所述关节螺丝的两侧设置有螺母固定板,所述角度调节螺母紧固连接在两个所述螺母固定板之间。
4、优选地,两个所述角度调节板对称设置在所述角度调节螺栓的两侧,所述角度调节螺栓通过角度调节销与两个所述角度调节板紧固连接;所述角度调节螺栓穿过所述角度调节销与所述角度调节螺母螺纹配合连接。
5、优选地,所述车体两侧分别设置有一组所述履带机构,所述轮组包括驱动轮、负重轮以及导向轮,一侧的所述驱动轮与另一侧的所述导向轮对应设置。
6、优选地,两组所述驱动机构与两组所述履带机构对应设置,所述驱动机构包括伺服电机、电机驱动器以及行星减速机。
7、优选地,所述伺服电机的输出端与所述行星减速机的输入端紧固连接,所述行星减速机的输出端通过万向联轴器与所述驱动轮连接;所述驱动轮与所述履带啮合连接。
8、优选地,所述负重轮和所述导向轮的内侧均与所述连接架紧固连接;所述驱动轮、所述负重轮以及所述导向轮的外侧均与所述挡板紧固连接。
9、优选地,所述挡板上设置有与所述刻度盘对应的观察孔;所述刻度盘紧固连接有刻度盘调节板。
10、优选地,所述车体的端部设置有万向吊环。
11、优选地,所述防护罩靠近所述六轴机械臂的一侧设置有防撞板,所述车体的顶部设置有与所述防撞板相匹配的凹槽。
12、与现有技术相比,本实用新型具有如下的有益效果:
13、1、本实用新型通过履带机构和履带角度调节装置的配合,能够根据待作业排水管道口径的不同调节履带的角度,有助于增加履带与管壁间的接触面积,从而有助于提升移动稳定性与越障能力,有助于扩大应用范围,有助于提高作业效率。
14、2、本实用新型通过履带角度调节装置内各个部件的配合,通过角度调节螺栓21与角度调节螺母26的螺纹配合,利用简单的结构实现角度调整,有助于降低生产成本,有助于扩大应用范围。
15、3、本实用新型通过轮组配合履带运动,有助于减少机器人在移动时侧翻与打滑的情况发生,从而有助于提高作业效率。
技术特征:
1.一种适用多种口径排水管道的树根切割作业机器人,其特征在于,包括:履带式底盘(2)、六轴机械臂(5)以及防护罩(8),所述履带式底盘(2)包括车体(9)、履带机构以及履带角度调节装置;
2.如权利要求1所述的适用多种口径排水管道的树根切割作业机器人,其特征在于,所述关节螺丝(25)的两侧设置有螺母固定板(24),所述角度调节螺母(26)紧固连接在两个所述螺母固定板(24)之间。
3.如权利要求1所述的适用多种口径排水管道的树根切割作业机器人,其特征在于,两个所述角度调节板(22)对称设置在所述角度调节螺栓(21)的两侧,所述角度调节螺栓(21)通过角度调节销(23)与两个所述角度调节板(22)紧固连接;
4.如权利要求1所述的适用多种口径排水管道的树根切割作业机器人,其特征在于,所述车体(9)两侧分别设置有一组所述履带机构,所述轮组包括驱动轮(16)、负重轮(17)以及导向轮(18),一侧的所述驱动轮(16)与另一侧的所述导向轮(18)对应设置。
5.如权利要求4所述的适用多种口径排水管道的树根切割作业机器人,其特征在于,两组所述驱动机构与两组所述履带机构对应设置,所述驱动机构包括伺服电机(10)、电机驱动器(11)以及行星减速机(12)。
6.如权利要求5所述的适用多种口径排水管道的树根切割作业机器人,其特征在于,所述伺服电机(10)的输出端与所述行星减速机(12)的输入端紧固连接,所述行星减速机(12)的输出端通过万向联轴器(13)与所述驱动轮(16)连接;
7.如权利要求4所述的适用多种口径排水管道的树根切割作业机器人,其特征在于,所述负重轮(17)和所述导向轮(18)的内侧均与所述连接架(19)紧固连接;
8.如权利要求1所述的适用多种口径排水管道的树根切割作业机器人,其特征在于,所述挡板(14)上设置有与所述刻度盘(27)对应的观察孔;
9.如权利要求1所述的适用多种口径排水管道的树根切割作业机器人,其特征在于,所述车体(9)的端部设置有万向吊环(3)。
10.如权利要求1所述的适用多种口径排水管道的树根切割作业机器人,其特征在于,所述防护罩(8)靠近所述六轴机械臂(5)的一侧设置有防撞板(6),所述车体(9)的顶部设置有与所述防撞板(6)相匹配的凹槽。
技术总结
本技术提供了一种适用多种口径排水管道的树根切割作业机器人,包括履带式底盘、六轴机械臂以及防护罩,履带式底盘包括车体、履带机构以及履带角度调节装置;防护罩内部设置有激光雷达和摄像头;六轴机械臂一端紧固连接有往复式切割头;履带机构包括履带,履带内部设置有轮组;车体的内部安装有驱动机构,驱动机构与轮组传动连接,轮组与履带传动连接;履带角度调节装置包括角度调节螺栓、角度调节板、关节螺丝、角度调节螺母以及刻度盘。本技术能够根据待作业排水管道口径的不同调节履带的角度,有助于增加履带与管壁间的接触面积,从而有助于提升移动稳定性与越障能力,有助于扩大应用范围,有助于提高作业效率。
技术研发人员:潘国乔
受保护的技术使用者:上海乔智科技有限公司
技术研发日:20221214
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!