一种低抖动的夹持装置的制作方法
本技术涉及夹持装置,特别是一种低抖动的夹持装置。
背景技术:
1、现有末端夹爪大多只有一个电机或者单个气源驱动,并且没有多个传感器辅助检测抓取状态,夹取目标物体时候可能因物体与左右夹爪之间的距离不同,而在单个驱动在驱动时,是同时驱动两个夹爪进行运动,此时物体左右两侧所受到夹取力度不平衡而造成目标物体的微运动,从而产生抖动现象,严重的时候会对目标物体造成损伤。若能将力传感器、超声波测距传感器等传感器应用到自动化装备的末端夹持装置中,便能大大增强夹持操作的稳定性和安全性,因此有必要研制一种多传感融合的低抖动鲁棒夹持装置。
技术实现思路
1、针对上述缺陷,本实用新型的目的在于提出一种低抖动的夹持装置,降低夹手在夹持物体时的抖动程度,更好的夹持物体。
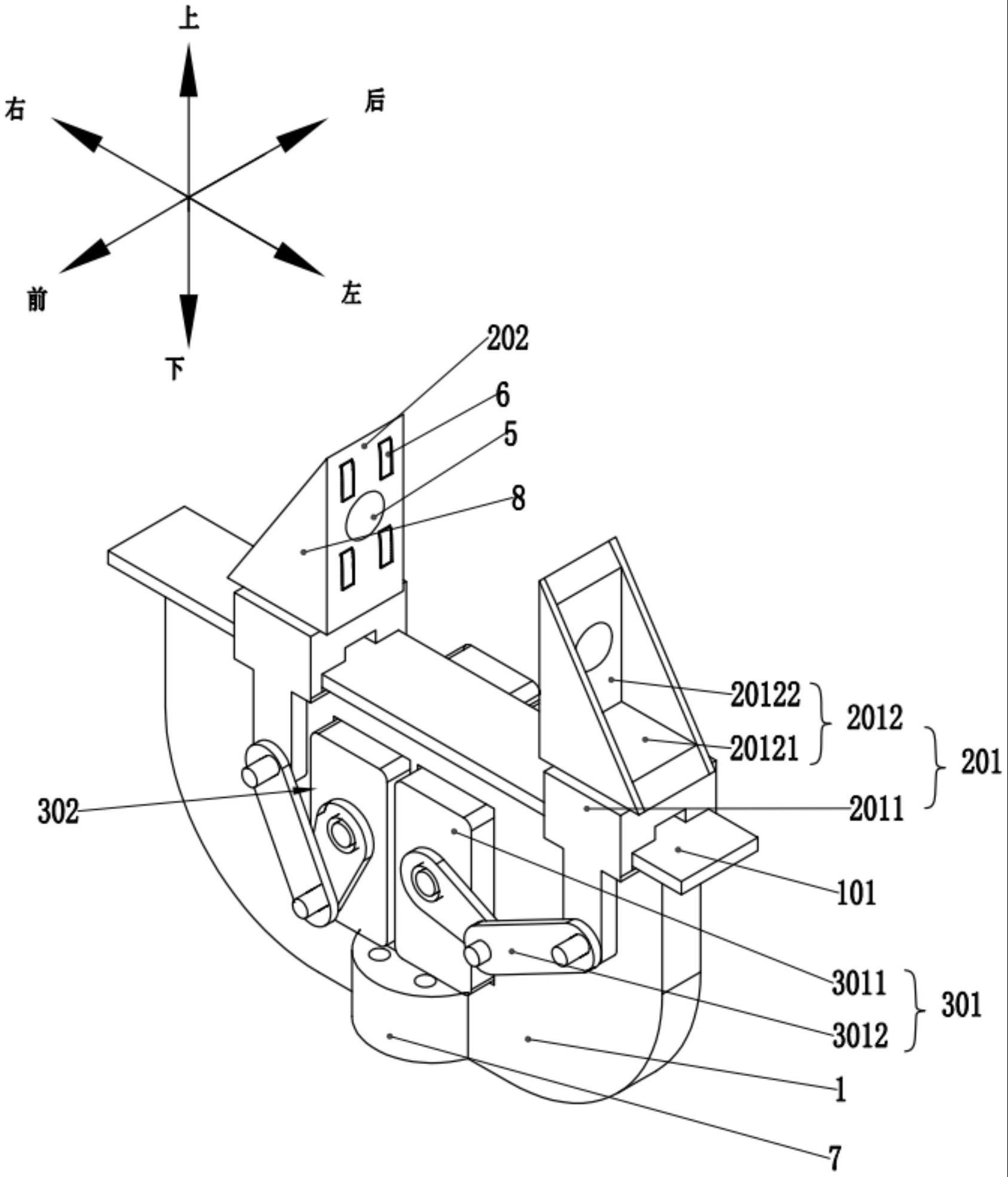
2、为达此目的,本实用新型采用以下技术方案:一种低抖动的夹持装置,包括夹持主体、左夹手、右夹手、左驱动件、右驱动件以及距离传感器;
3、所述夹持主体的顶端设置有滑动导向板,所述左夹手与右夹手分别相向滑动安装于所述滑动导向板;
4、所述距离传感器包括第一传感器与第二传感器,左夹手与右夹手的相向面分别安装有第一传感器与第二传感器;
5、所述左驱动件与右驱动件固定安装于所述夹持主体,且所述左驱动件驱动所述左夹手沿所述滑动导向板滑动,所述右驱动件驱动所述右夹手沿所述滑动导向板滑动;
6、第一传感器与第二传感器分别与所述左驱动件与右驱动件电联接。
7、优选的,所述左夹手包括安装座以及夹手主体;
8、所述安装座开设有滑槽,所述滑槽限位安装于所述滑动导向板;
9、所述夹手主体包括相互连接的安装板与夹持板,所述安装板水平安装于所述安装座,所述夹持板垂直固定于所述安装板的一端,所述夹持面的中心开设有安装孔,所述安装孔内固定安装有所述距离传感器,所述距离传感器的厚度小于所述安装孔的深度。
10、优选的,还包括若干薄膜力传感器,所述薄膜力传感器安装于所述夹持面的表面,且若干薄膜力传感器分别等距离阵列分部于所述安装孔的四周;
11、所述薄膜力传感器电联接所述左驱动件和右驱动件。
12、优选的,左驱动件包括电机以及若干导杆;
13、所述电机固定于所述夹持主体,且所述电机向夹持主体的两侧突出有两个输出端;
14、若干导杆首尾相铰接形成曲柄摇杆机构,其曲柄摇杆机构的一端与所述电机传动连接,所述曲柄摇杆机构的另一端夹手主体铰接。
15、优选的,所述夹持主体的底部设置有法兰连接器。
16、优选的,所述距离传感器为xkc-kl200超声测距传感器。
17、优选的,所述膜力传感器为md30-60薄膜压力传感器。
18、优选的,所述夹手主体的左右两侧分别固定连接有所述加强板,所述加强板连接于安装板与夹持板的侧壁面。
19、上述技术方案中的一个技术方案具有如下优点或有益效果:左夹手和右夹手分别独立与左驱动件和右驱动件传动连接。当需要进行物体夹持时,左夹手与右夹手分别置于物体的两侧,此时第一传感器与第二传感器分别测量得到左夹手、右夹手分别到物体的距离,然后根据该距离对左驱动件、右驱动件进行驱动,控制左夹手与右夹手分别独立向物体进行靠拢,分别同时与物体进行相抵。避免物体在某一时刻左右两侧所受到的夹持力不同,而导致物体发生发生抖动的情况。
技术特征:
1.一种低抖动的夹持装置,其特征在于,包括夹持主体、左夹手、右夹手、左驱动件、右驱动件以及距离传感器;
2.根据权利要求1所述的一种低抖动的夹持装置,其特征在于,所述左夹手包括安装座以及夹手主体;
3.根据权利要求2所述的一种低抖动的夹持装置,其特征在于,还包括若干薄膜力传感器,所述薄膜力传感器安装于所述夹持板的表面,且若干薄膜力传感器分别等距离阵列分部于所述安装孔的四周;
4.根据权利要求2所述的一种低抖动的夹持装置,其特征在于,左驱动件包括电机以及若干导杆;
5.根据权利要求2所述的一种低抖动的夹持装置,其特征在于,所述夹持主体的底部设置有法兰连接器。
6.根据权利要求1所述的一种低抖动的夹持装置,其特征在于,所述距离传感器为xkc-kl200超声测距传感器。
7.根据权利要求3所述的一种低抖动的夹持装置,其特征在于,所述薄膜力传感器为md30-60薄膜压力传感器。
8.根据权利要求2所述的一种低抖动的夹持装置,其特征在于,还包括有加强板,所述夹手主体的左右两侧分别固定连接有所述加强板,所述加强板连接于安装板与夹持板的侧壁面。
技术总结
一种低抖动的夹持装置,包括夹持主体、左夹手、右夹手、左驱动件、右驱动件以及距离传感器;夹持主体的顶端设置有滑动导向板,左夹手与右夹手分别相向滑动安装于滑动导向板;距离传感器包括第一传感器与第二传感器,左夹手与右夹手的相向面分别安装有第一传感器与第二传感器;左驱动件与右驱动件固定安装于夹持主体,且左驱动件驱动左夹手沿滑动导向板滑动,右驱动件驱动右夹手沿滑动导向板滑动;第一传感器与第二传感器分别与左驱动件与右驱动件电联接。左夹手与右夹手分别独立向物体进行靠拢,分别同时与物体进行相抵。避免物体在某一时刻左右两侧所受到的夹持力不同,而导致物体发生发生抖动的情况。
技术研发人员:刁世普,杨海东,杨淑爱,邱彩香
受保护的技术使用者:佛山市南海区广工大数控装备协同创新研究院
技术研发日:20221216
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!