一种移动机器人的多路径规划装置的制作方法
本技术涉及机器人,具体为一种移动机器人的多路径规划装置。
背景技术:
1、移动机器人具有在环境中四处移动的能力,并且不会固定在一个物理位置,移动机器人可以是“自主的”(amr-自主移动机器人),移动机器人在多路径规划装置的辅助下可以在不受控制的环境中导航,而无需物理或机电引导设备。
2、中国授权公告号cn215679135u公开了一种移动机器人的多路径规划装置,包括机体,所述机体的右端设置有缓冲板,所述缓冲板的外表面开设有辅助转槽,所述辅助转槽的内壁焊接有销钉,所述销钉的外表面转动连接有衔接杆,所述衔接杆的外表面固定连接有定位盘,所述定位盘的外表面固定安装有弹簧二,所述机体的外表面焊接有圆筒,所述圆筒的内壁焊接有定位圆环,所述缓冲板的外表面开设有缓冲滑槽,所述缓冲滑槽的内壁焊接有圆杆,所述圆杆的外表面滑动连接有贴合块;有利于对该多路径规划装置进行防护,防止发生刚性碰撞时对其内部元件造成损坏的现象,有利于对转动块的拆卸,方便对激光仪的更换与检修,提高该多路径规划装置的使用效果。
3、上述专利中的防护结构只能对移动机器人的多路径规划装置的一侧进行防护,防护范围小,导致移动机器人的多路径规划装置的其他侧容易发生碰撞损坏,并且该移动机器人的多路径规划装置只有避障功能,缺乏越障的能力,为此,我们提出一种移动机器人的多路径规划装置。
技术实现思路
1、本实用新型的目的在于提供一种移动机器人的多路径规划装置,以解决上述背景技术中提出上述专利中的防护结构只能对移动机器人的多路径规划装置的一侧进行防护,防护范围小,导致移动机器人的多路径规划装置的其他侧容易发生碰撞损坏,并且该移动机器人的多路径规划装置只有避障功能,缺乏越障的能力的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种移动机器人的多路径规划装置,包括机器人机体,所述机器人机体的外表面安装有连接杆,所述连接杆远离机器人机体的一侧安装有缓冲轴承,所述缓冲轴承的外表面安装有若干个缓冲弹簧,所述缓冲弹簧远离缓冲轴承的一侧安装有防撞挡板,所述防撞挡板的外表面安装有橡胶垫;
3、活动筒,其活动安装在所述防撞挡板的内壁,所述活动筒的内部活动安装有伸缩杆。
4、优选的,所述连接杆与缓冲轴承焊接连接,且连接杆与机器人机体焊接连接。
5、优选的,所述防撞挡板通过缓冲弹簧与缓冲轴承弹性连接,且防撞挡板的直径尺寸大于缓冲轴承的直径尺寸。
6、优选的,所述伸缩杆与缓冲轴承活动连接,且伸缩杆实现在活动筒的内部伸缩。
7、优选的,所述机器人机体还设有:
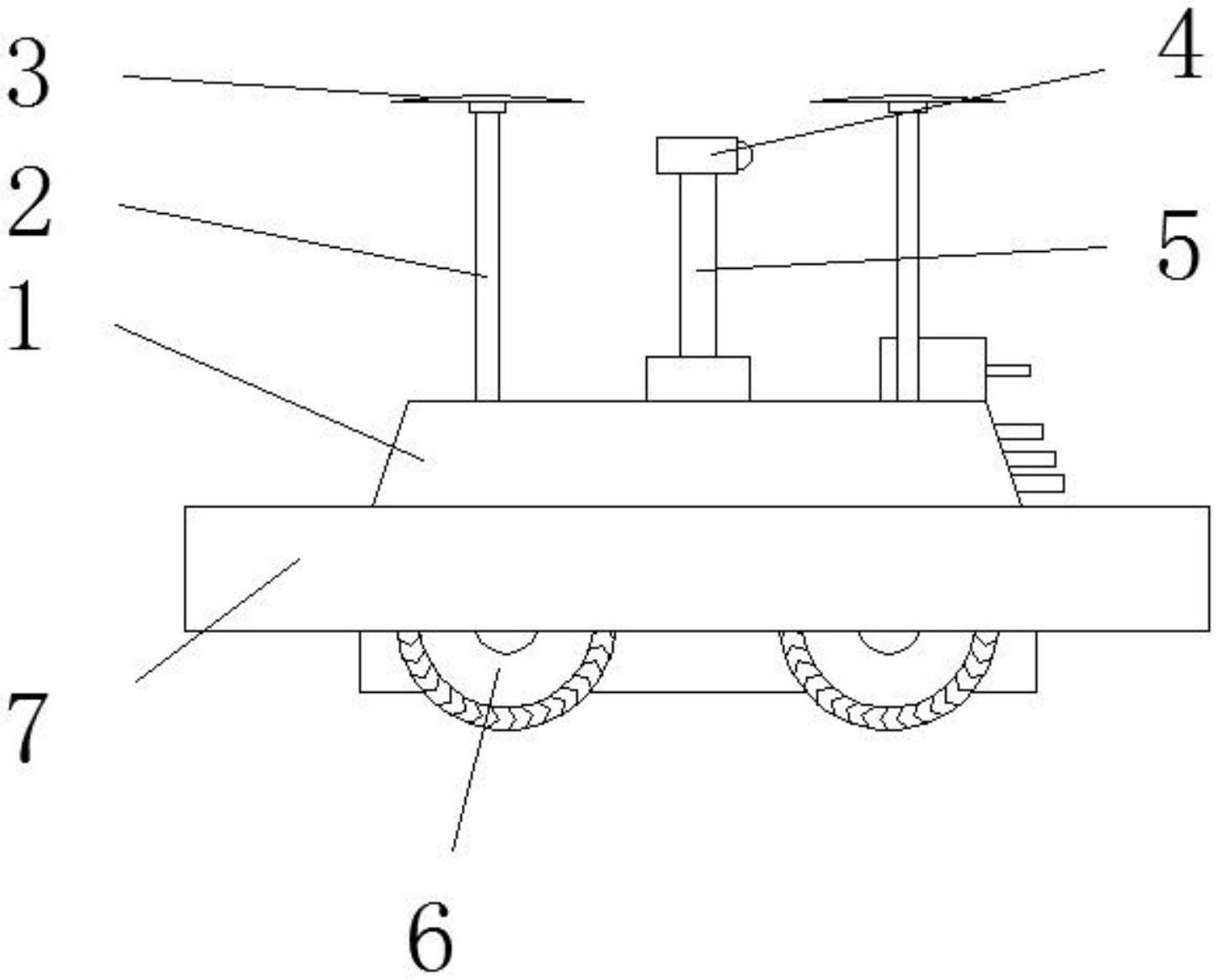
8、支撑柱,其安装在所述机器人机体的上方,所述支撑柱的上方安装有激光仪,所述机器人机体下方安装有移动轮。
9、优选的,所述机器人机体还设有:
10、连接轴承,其安装在所述机器人机体的内部,所述连接轴承的内部安装有传动杆,所述传动杆的上方安装有无人机翼,所述连接轴承的下方开设有安装槽,所述安装槽的内部安装有电机。
11、优选的,所述传动杆通过连接轴承与机器人机体活动连接,且电机的输出端与传动杆键连接。
12、与现有技术相比,本实用新型提供了一种移动机器人的多路径规划装置,具备以下有益效果:该移动机器人的多路径规划装置,通过防撞挡板、缓冲轴承和缓冲弹簧对机器人机体进行全方位防护,扩大了机器人机体的防护范围,提高了机器人机体的防护效果。
13、1.本实用新型通过防撞挡板、缓冲轴承和缓冲弹簧对机器人机体进行全方位防护,扩大了机器人机体的防护范围,提高了机器人机体的防护效果;
14、2.本实用新型通过传动杆、无人机翼和电机带动机器人机体上升飞行,以便于辅助该多路径规划装置越过沟壑或不可翻越的障碍。
技术特征:
1.一种移动机器人的多路径规划装置,其特征在于,包括:
2.根据权利要求1所述的一种移动机器人的多路径规划装置,其特征在于,所述连接杆(12)与缓冲轴承(13)焊接连接,且连接杆(12)与机器人机体(1)焊接连接。
3.根据权利要求1所述的一种移动机器人的多路径规划装置,其特征在于,所述防撞挡板(7)通过缓冲弹簧(14)与缓冲轴承(13)弹性连接,且防撞挡板(7)的直径尺寸大于缓冲轴承(13)的直径尺寸。
4.根据权利要求1所述的一种移动机器人的多路径规划装置,其特征在于,所述伸缩杆(15)与缓冲轴承(13)活动连接,且伸缩杆(15)实现在活动筒(16)的内部伸缩。
5.根据权利要求1所述的一种移动机器人的多路径规划装置,其特征在于,所述机器人机体(1)还设有:
6.根据权利要求1所述的一种移动机器人的多路径规划装置,其特征在于,所述机器人机体(1)还设有:
7.根据权利要求6所述的一种移动机器人的多路径规划装置,其特征在于,所述传动杆(2)通过连接轴承(8)与机器人机体(1)活动连接,且电机(9)的输出端与传动杆(2)键连接。
技术总结
本技术公开了一种移动机器人的多路径规划装置,包括机器人机体,所述机器人机体的外表面安装有连接杆,所述连接杆远离机器人机体的一侧安装有缓冲轴承,所述缓冲轴承的外表面安装有若干个缓冲弹簧,所述缓冲弹簧远离缓冲轴承的一侧安装有防撞挡板,所述防撞挡板的外表面安装有橡胶垫;活动筒,其活动安装在所述防撞挡板的内壁,所述活动筒的内部活动安装有伸缩杆。与现有技术相比,本技术提供了一种移动机器人的多路径规划装置,具备以下有益效果:该移动机器人的多路径规划装置,通过防撞挡板、缓冲轴承和缓冲弹簧对机器人机体进行全方位防护,扩大了机器人机体的防护范围,提高了机器人机体的防护效果。
技术研发人员:董晓峰,赵阳,李国祥,温永强,刘春龙,赵慧武,李腾,崔文玲,李晋军,张智翔,刘玉,薛晓晶,于德安
受保护的技术使用者:董晓峰
技术研发日:20221221
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!