一种可转动调节的机械手的制作方法
本技术涉及机械手,尤其涉及一种可转动调节的机械手。
背景技术:
1、近年来,随着工业科技的快速发展,机械手设备方面的技术也在不断推进和完善,机械手设备的使用能够有效对材料进行输送,方便用户对工业材料进行快捷搬运,从而提升工业生产的进度,节省了人力和时间,需要能够对原来的机械手装置进行改进,以增强机械手装置的功能和效果。
2、目前市面上中小型企业为了缩减使用成本,所普遍使用的机械手一般只具备夹取物料进行短距离输送的功能,该种机械手在实际使用时不能根据实际使用需求调节对机械手的角度进行转动,因此需要人工将待夹取物料保证,从而导致机械手夹取效率低,且不能根据实际使用需求对机械手进行纵向的驱动,进而导致机械手移动存在很大的局限性,因此需要设计一种可转动调节的机械手来解决上述问题。
技术实现思路
1、本部分的目的在于概述本实用新型的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
2、鉴于上述现有一种可转动调节的机械手存在的问题,提出了本实用新型。
3、因此,本实用新型目的是提供一种可转动调节的机械手,其适用于解决只具备夹取物料进行短距离输送的功能,该种机械手在实际使用时不能根据实际使用需求调节对机械手的角度进行转动,因此需要人工将待夹取物料保证,从而导致机械手夹取效率低,且不能根据实际使用需求对机械手进行纵向的驱动,进而导致机械手移动存在很大的局限性的问题。
4、为解决上述技术问题,本实用新型提供如下技术方案:一种可转动调节的机械手,包括:
5、主体单元,其包括电动滑轨以及滑动套设在电动滑轨上的电动滑块,所述电动滑轨两端固定安装有位置对称的支撑壁;
6、多方位调节单元,其包括固定安装在电动滑块下端的纵向框以及固定安装在纵向框一端的第一电机,所述第一电机输出轴向内贯穿纵向框一侧固定连接有丝杆,所述丝杆远离第一电机输出轴的一端与纵向框内壁转动连接,所述丝杆上螺纹连接有移动螺母,且移动螺母与纵向框滑动连接,所述移动螺母下侧壁固定安装有第二电机,所述第二电机输出轴通过连接臂固定连接有空心盒,且空心盒侧壁滑动连接有多组均匀分布的机械爪。
7、作为本实用新型所述一种可转动调节的机械手的一种优选方案,其中:所述机械手还包括紧固夹紧单元,其包括固定安装在空心盒上侧壁的伺服电机以及固定安装在伺服电机输出轴下端的第一斜齿轮,所述伺服电机输出轴插入空心盒上侧壁设置,所述空心盒内设置有多组与第一斜齿轮啮合的第二斜齿轮,每个所述第二斜齿轮与空心盒内壁均通过螺纹杆转动连接,所述螺纹杆上螺纹连接有对应的移动套,所述移动套与对应的机械爪固定连接。
8、作为本实用新型所述一种可转动调节的机械手的一种优选方案,其中:每个所述连接臂均设置成l型,且连接臂采用奥氏体不锈钢材料制作而成。
9、作为本实用新型所述一种可转动调节的机械手的一种优选方案,其中:所述移动螺母与纵向框通过对应的限位滑块和限位滑槽滑动连接。
10、作为本实用新型所述一种可转动调节的机械手的一种优选方案,其中:所述第一斜齿轮与第二斜齿轮上均设置有分布均匀的防滑纹。
11、作为本实用新型所述一种可转动调节的机械手的一种优选方案,其中:每个所述连接臂远离移动套的一端均垫设有一层厚度均匀的网格纹硅胶垫。
12、本实用新型的有益效果:控制电动滑块在电动滑轨上移动,电动滑块能够通过纵向框带动机械爪在横向上的移动,通过控制第一电机输出轴带动丝杆转动,与丝杆螺纹连接的移动螺母通过带动机械爪进行纵向的移动,而通过第二电机输出轴带动空心盒转动,能够在水平角度上控制机械爪转动,同时满足不同条件下对物件的夹取需求,能够同时在横向、纵向以及转动对机械手进行调节,使用较为灵活控制简单,尤其适用于中小型企业的生产需求;
13、对物件进行夹取时,控制伺服电机输出轴正转,第一斜齿轮通过第二斜齿轮同时控制多组螺纹杆转动,与螺纹杆螺纹连接的移动套带动对应的机械爪相互靠近完成对物件的夹具,相比于传统的气动夹爪,该夹爪完全由伺服电机控制,对物件采用刚性夹持的方式,提高了对物件夹取的稳固性,有效解决了在夹取过程中因夹持松动导致物件脱落跌损的问题。
14、附图说明
15、为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。其中:
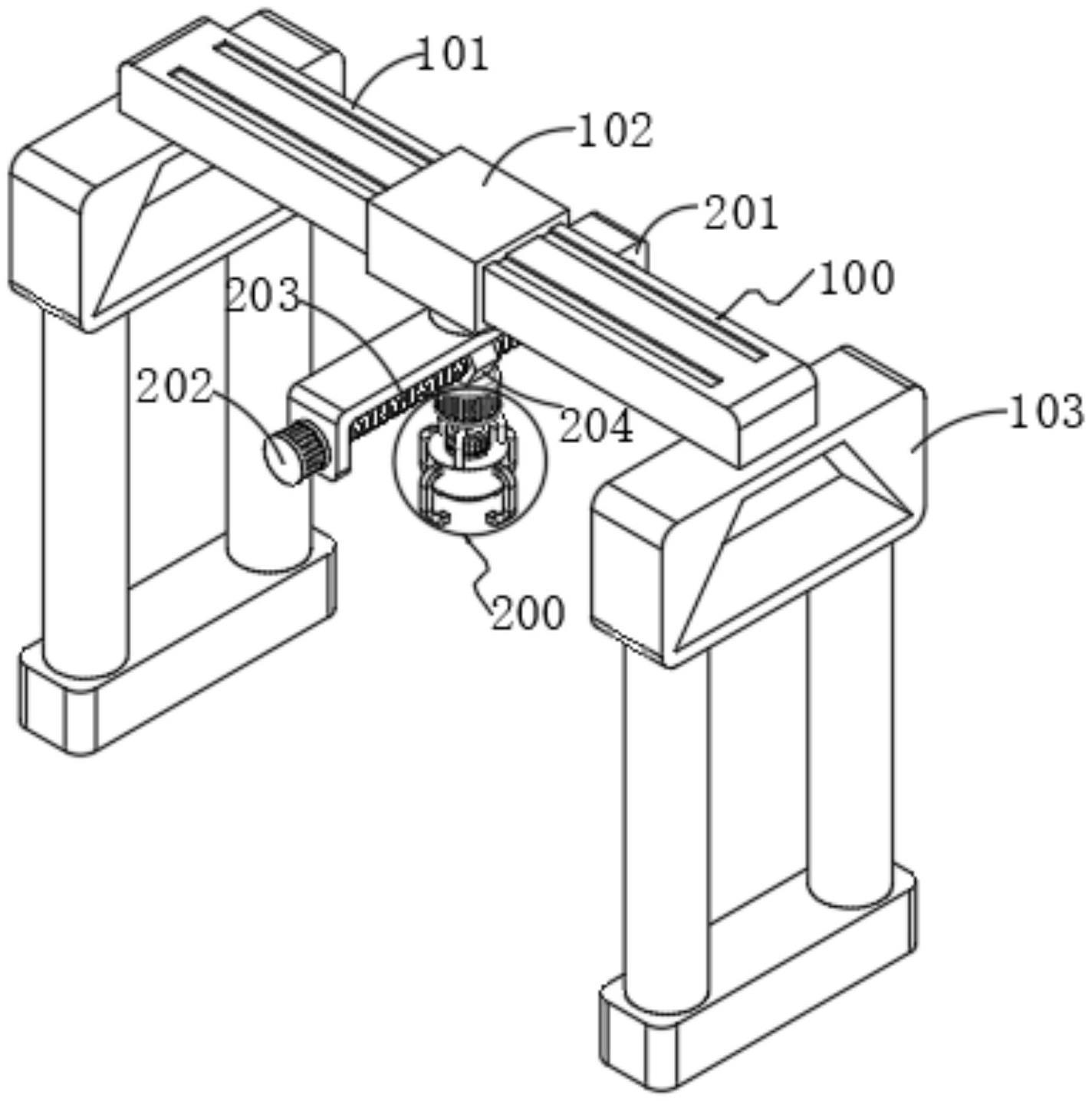
16、图1为本实用新型提出的一种可转动调节的机械手的整体结构示意图;
17、图2为本实用新型提出的一种可转动调节的机械手的多方位调节单元结构示意图;
18、图3为本实用新型提出的一种可转动调节的机械手的紧固夹紧单元结构示意图。
技术特征:
1.一种可转动调节的机械手,其特征在于,包括:
2.根据权利要求1所述的一种可转动调节的机械手,其特征在于:所述机械手还包括紧固夹紧单元(300),其包括固定安装在空心盒(207)上侧壁的伺服电机(301)以及固定安装在伺服电机(301)输出轴下端的第一斜齿轮(302),所述伺服电机(301)输出轴插入空心盒(207)上侧壁设置,所述空心盒(207)内设置有多组与第一斜齿轮(302)啮合的第二斜齿轮(303),每个所述第二斜齿轮(303)与空心盒(207)内壁均通过螺纹杆(304)转动连接,所述螺纹杆(304)上螺纹连接有对应的移动套(305),所述移动套(305)与对应的机械爪(208)固定连接。
3.根据权利要求1所述的一种可转动调节的机械手,其特征在于:每个所述连接臂(206)均设置成l型,且连接臂(206)采用奥氏体不锈钢材料制作而成。
4.根据权利要求1所述的一种可转动调节的机械手,其特征在于:所述移动螺母(204)与纵向框(201)通过对应的限位滑块和限位滑槽滑动连接。
5.根据权利要求2所述的一种可转动调节的机械手,其特征在于:所述第一斜齿轮(302)与第二斜齿轮(303)上均设置有分布均匀的防滑纹。
6.根据权利要求2所述的一种可转动调节的机械手,其特征在于:每个所述连接臂(206)远离移动套(305)的一端均垫设有一层厚度均匀的网格纹硅胶垫。
技术总结
本技术公开了一种可转动调节的机械手,包括:主体单元,其包括电动滑轨以及滑动套设在电动滑轨上的电动滑块,所述电动滑轨两端固定安装有位置对称的支撑壁;多方位调节单元,其包括固定安装在电动滑块下端的纵向框以及固定安装在纵向框一端的第一电机,所述第一电机输出轴向内贯穿纵向框一侧固定连接有丝杆,所述丝杆远离第一电机输出轴的一端与纵向框内壁转动连接,所述丝杆上螺纹连接有移动螺母,且移动螺母与纵向框滑动连接,所述移动螺母下侧壁固定安装有第二电机。本技术能够同时在横向、纵向以及转动对机械手进行调节,使用较为灵活控制简单,同时满足不同条件下对物件的夹取需求,尤其适用于中小型企业的生产需求。
技术研发人员:魏理响
受保护的技术使用者:苏格朗智能科技(宿迁)有限公司
技术研发日:20221222
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!