一种工业机器人复合夹具的制作方法
本技术涉及复合夹具领域,具体涉及一种工业机器人复合夹具。
背景技术:
1、工业机器人装配系统中,机械臂末端为了配合各功能模块的使用需要配置夹具,现有的夹具在使用的过程中都是一对一的,对不同物件夹持需要更换不同的夹具,无法做到单体多用,不利于成本的降低和工作效率的提高,十分不便。
技术实现思路
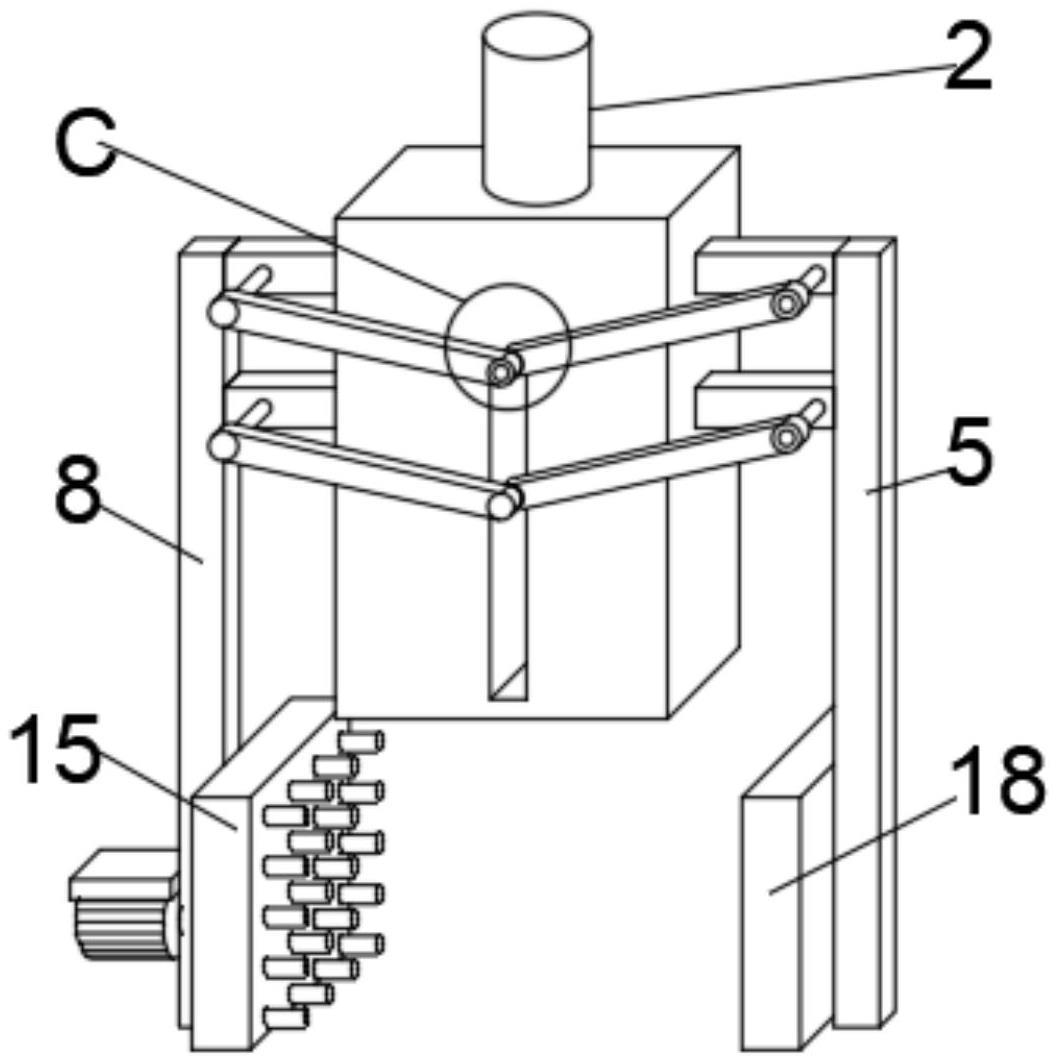
1、为解决上述技术问题,本实用新型提供一种工业机器人复合夹具,包括固定板,所述固定板的一侧滑动连接有第一滑杆,所述第一滑杆的一端固定连接有第一连接杆,所述固定板的另一侧滑动连接有第二滑杆,所述第二滑杆的一端固定连接有第二连接杆,所述固定板的内壁滑动连接有下压杆,所述第一滑杆的外壁固定连接有第一转轴,所述第一转轴的外壁转动连接有第二转杆,所述第二滑杆的外壁固定连接有第二转轴,所述第二转轴的外壁转动连接有第一转杆。
2、优选的:所述下压杆的外壁固定连接有第三转轴,所述第一转杆与第三转轴转动连接,所述第二转轴与第三转轴转动连接。
3、优选的:所述固定板的顶部固定连接有气缸,所述气缸的输出端贯穿固定板且与下压杆固定连接。
4、优选的:所述固定板的内壁设置有配合第一滑杆、第二滑杆使用的滑槽。
5、优选的:所述第二连接杆的一侧固定连接有电机,所述电机的输出端贯穿第二连接杆且固定连接有第一夹板。
6、优选的:所述第一连接杆的一侧转动连接有第二夹板。
7、优选的:所述第一夹板与第二夹板的内壁均滑动连接有限位杆,所述限位杆的一端设置有弹簧。
8、本实用新型的技术效果和优点:
9、向下移动下压杆,带动第三转轴向下移动,使第一转杆与第二转杆转动,第一转杆与第二转杆转动的同时,带动第一滑杆与第二滑杆同时向固定板的内部移动,带动第一连接杆与第二连接杆相互靠近,对物件进行夹持,此结构适合对不同大小的物件进行夹持。
技术特征:
1.一种工业机器人复合夹具,包括固定板(1),其特征在于,所述固定板(1)的一侧滑动连接有第一滑杆(3),所述第一滑杆(3)的一端固定连接有第一连接杆(5),所述固定板(1)的另一侧滑动连接有第二滑杆(6),所述第二滑杆(6)的一端固定连接有第二连接杆(8),所述固定板(1)的内壁滑动连接有下压杆(13),所述第一滑杆(3)的外壁固定连接有第一转轴(4),所述第一转轴(4)的外壁转动连接有第二转杆(14),所述第二滑杆(6)的外壁固定连接有第二转轴(7),所述第二转轴(7)的外壁转动连接有第一转杆(12)。
2.根据权利要求1所述的一种工业机器人复合夹具,其特征在于,所述下压杆(13)的外壁固定连接有第三转轴(11),所述第一转杆(12)与第三转轴(11)转动连接,所述第二转轴(7)与第三转轴(11)转动连接。
3.根据权利要求1所述的一种工业机器人复合夹具,其特征在于,所述固定板(1)的顶部固定连接有气缸(2),所述气缸(2)的输出端贯穿固定板(1)且与下压杆(13)固定连接。
4.根据权利要求1所述的一种工业机器人复合夹具,其特征在于,所述固定板(1)的内壁设置有配合第一滑杆(3)、第二滑杆(6)使用的滑槽(10)。
5.根据权利要求1所述的一种工业机器人复合夹具,其特征在于,所述第二连接杆(8)的一侧固定连接有电机(9),所述电机(9)的输出端贯穿第二连接杆(8)且固定连接有第一夹板(15)。
6.根据权利要求5所述的一种工业机器人复合夹具,其特征在于,所述第一连接杆(5)的一侧转动连接有第二夹板(18)。
7.根据权利要求6所述的一种工业机器人复合夹具,其特征在于,所述第一夹板(15)与第二夹板(18)的内壁均滑动连接有限位杆(16),所述限位杆(16)的一端设置有弹簧(17)。
技术总结
本技术公开了一种工业机器人复合夹具,包括固定板,固定板的一侧滑动连接有第一滑杆,第一滑杆的一端固定连接有第一连接杆,固定板的另一侧滑动连接有第二滑杆,第二滑杆的一端固定连接有第二连接杆,固定板的内壁滑动连接有下压杆,第一滑杆的外壁固定连接有第一转轴,第一转轴的外壁转动连接有第二转杆,第二滑杆的外壁固定连接有第二转轴,本技术的有益效果在于,向下移动下压杆,带动第三转轴向下移动,使第一转杆与第二转杆转动,第一转杆与第二转杆转动的同时,带动第一滑杆与第二滑杆同时向固定板的内部移动,带动第一连接杆与第二连接杆相互靠近,对物件进行夹持,此结构适合对不同大小的物件进行夹持。
技术研发人员:陈永报,蒲建,兰远健
受保护的技术使用者:四川博尔特机器人科技有限公司
技术研发日:20221222
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!