一种桁架机械手结构的制作方法
本技术涉及自动化控制,具体为一种桁架机械手结构。
背景技术:
1、随着经济的不断发展和科技的不断进步,为自动化生产制造行业迅速崛起提供了一个良好的发展平台,在自动化生产制造行业中,为了保证产品的高精度、高质量、高效率要求,相应地,应用于自动化生产制造行业中的各种设备、装置或机器必须能达到要求。
2、目前,在焊接、装配、注塑等机械加工生产过程中,一般都需要对工件进行取料和放料的操作,但是在很多机械加工生产过程中都是采用人工实施取料和放料的操作,操作不方便,生产效率低。
技术实现思路
1、本实用新型提供了一种桁架机械手结构,以解决背景技术中的问题。
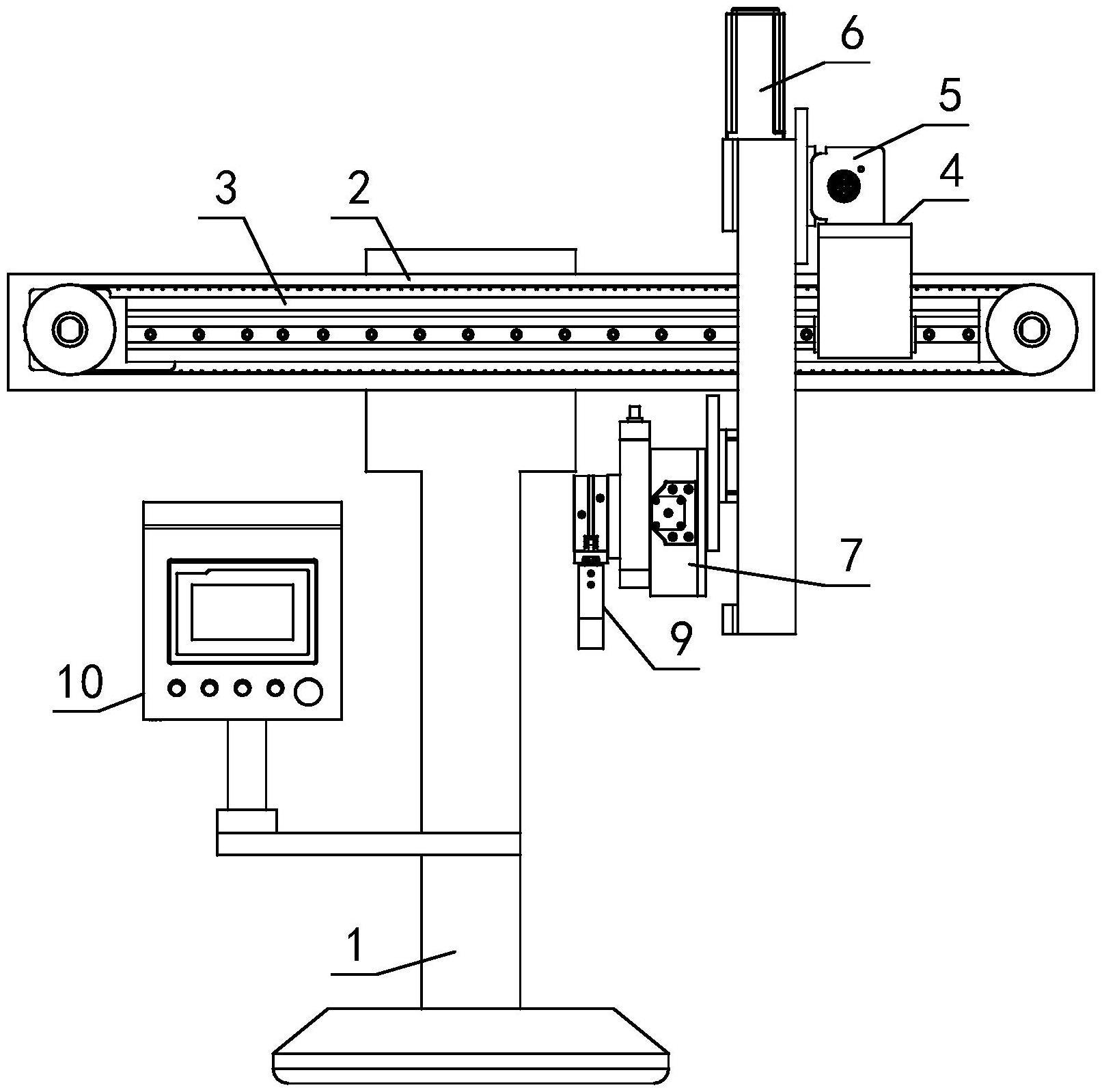
2、为实现上述目的,本实用新型提供如下技术方案:一种桁架机械手结构,包括支架,所述支架的顶部安装有背板,且背板上安装有x轴直线模组,所述x轴直线模组的滑台上安装有第一连接板,且第一连接板上安装有y轴直线模组,所述y轴直线模组的滑台上安装有z轴直线模组,且z轴直线模组的滑台上安装有第二连接板,所述第二连接板上分别安装有固定式机械爪和活动式机械爪;
3、所述固定式机械爪包括第一回转气缸和第一气动夹指,所述第一气动夹指安装于第一回转气缸的转台上;
4、所述活动式机械爪包括直线电机、第二回转气缸及第二气动夹指,所述第二回转气缸安装于直线电机的滑台上,所述第二气动夹指安装于第二回转气缸的转台上。
5、进一步的,所述支架上安装有plc控制面板,所述x轴直线模组、y轴直线模组及z轴直线模组分别与plc控制面板电性连接。
6、进一步的,所述固定式机械爪和活动式机械爪分别通过输气电磁阀与plc控制面板电性连接。
7、进一步的,所述x轴直线模组为同步带型,所述y轴直线模组和z轴直线模组均为滚珠丝杆型。
8、进一步的,所述第二连接板上设有凸台,所述固定式机械爪位于凸台上,并与活动式机械爪相平齐。
9、进一步的,所述第一气动夹指和第二气动夹指的夹爪上均安装有弧形夹块,且弧形夹块的内面贴附有橡胶垫。
10、与现有技术相比,本实用新型提供了一种桁架机械手结构,具备以下有益效果:
11、该桁架机械手结构,通过plc控制直线模组完成x、y、z三轴之间的联合运动,利用双工位式的固定式机械爪和活动式机械爪自动上、下料,取代了人工操作,并可根据不同工况需要调整抓取角度,满足生产需要,这样就可以很好的控制节拍,避免了由于人为因素而对生产节拍产生的影响,大大提高了生产效率。
技术特征:
1.一种桁架机械手结构,包括支架(1),其特征在于:所述支架(1)的顶部安装有背板(2),且背板(2)上安装有x轴直线模组(3),所述x轴直线模组(3)的滑台上安装有第一连接板(4),且第一连接板(4)上安装有y轴直线模组(5),所述y轴直线模组(5)的滑台上安装有z轴直线模组(6),且z轴直线模组(6)的滑台上安装有第二连接板(7),所述第二连接板(7)上分别安装有固定式机械爪(8)和活动式机械爪(9);
2.根据权利要求1所述的一种桁架机械手结构,其特征在于:所述支架(1)上安装有plc控制面板(10),所述x轴直线模组(3)、y轴直线模组(5)及z轴直线模组(6)分别与plc控制面板(10)电性连接。
3.根据权利要求2所述的一种桁架机械手结构,其特征在于:所述固定式机械爪(8)和活动式机械爪(9)分别通过输气电磁阀与plc控制面板(10)电性连接。
4.根据权利要求1所述的一种桁架机械手结构,其特征在于:所述x轴直线模组(3)为同步带型,所述y轴直线模组(5)和z轴直线模组(6)均为滚珠丝杆型。
5.根据权利要求1所述的一种桁架机械手结构,其特征在于:所述第二连接板(7)上设有凸台(71),所述固定式机械爪(8)位于凸台(71)上,并与活动式机械爪(9)相平齐。
6.根据权利要求1所述的一种桁架机械手结构,其特征在于:所述第一气动夹指(82)和第二气动夹指(93)的夹爪上均安装有弧形夹块(11),且弧形夹块(11)的内面贴附有橡胶垫(12)。
技术总结
本技术公开了一种桁架机械手结构,涉及自动化控制技术领域。包括支架,所述支架的顶部安装有背板,且背板上安装有X轴直线模组,所述X轴直线模组的滑台上安装有第一连接板,且第一连接板上安装有Y轴直线模组,所述Y轴直线模组的滑台上安装有Z轴直线模组,且Z轴直线模组的滑台上安装有第二连接板。该桁架机械手结构,通过PLC控制直线模组完成X、Y、Z三轴之间的联合运动,利用双工位式的固定式机械爪和活动式机械爪自动上、下料,取代了人工操作,并可根据不同工况需要调整抓取角度,满足生产需要,这样就可以很好的控制节拍,避免了由于人为因素而对生产节拍产生的影响,大大提高了生产效率。
技术研发人员:李政好
受保护的技术使用者:深圳市瑞克斯机械有限公司
技术研发日:20221223
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!