一种夹取手臂升降机构的制作方法
1.本实用新型涉及压铸机辅助机械领域,特别涉及了一种应用于取出机的夹取手臂升降机构。
背景技术:
2.取出机是应用于压铸行业的常见机器,取出机通常作为压铸机配套设备使用,目前取出机的夹取手臂在夹取工作中都是固定高度,所以在往注料口下部延伸需要取形状较为复杂、尺寸较大的工件时,取出工序就较为复杂,并且取出的困难也较大。
3.本申请所要解决的技术问题为:设计一款能够升降从而能够适用于各种形状尺寸的夹取手臂升降机构。
技术实现要素:
4.为了克服现有技术的不足,本实用新型的目的在于提供一种夹取手臂升降机构。
5.本实用新型所采用的技术方案为:包括机械手臂和与机械手臂一端固定连接的夹取机构,机械手臂另一端设有与之固定安装的连接座,连接座设有驱动其升降的升降机构,升降机构包括基板,基板分别设有与之固定安装的滑轨和驱动气缸,驱动气缸驱动端设有与之固定连接的连接板,连接板设有与之固定安装的滑动座,滑动座与滑轨限位滑动配合,滑动座设有与之固定连接的安装板,安装板与连接座固定安装。
6.在一些实施方式中,基板上设有行程开关,行程开关包括分别与基板固定安装的上位感应开关和下位感应开关,连接板上设有与之固定安装的行程开关撞块,行程开关撞块分别对应上位感应开关和下位感应开关设置。
7.在一些实施方式中,滑动座设有与之固定安装的承接板,承接板呈l形。
8.在一些实施方式中,承接板一端与连接板固定安装,安装板设有与之固定连接的侧板,侧板与承接板另一端固定连接。
9.在一些实施方式中,基板设有与之固定安装的防护罩。
10.在一些实施方式中,滑轨底端设有与之固定安装的限停板。
11.本实用新型的有益效果在于:
12.该夹取手臂升降机构通过在机械手臂的一端设有与之固定安装的连接座,连接座设有驱动其升降的升降机构,升降机构中的驱动气缸可驱动连接板从而带动滑动座在滑轨上滑动,使滑动座带动安装板从而带动机械手臂能够滑动升降,进而使机械手臂上的夹取机构能够轻松将压铸机中各种形状复杂、尺寸较大的工件轻松取出,简化取出工序的同时降低取出难度。
附图说明
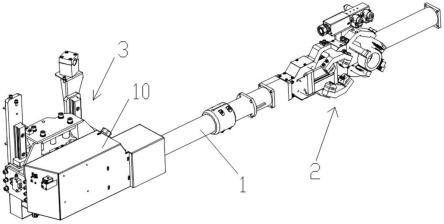
13.图1为本实用新型夹取手臂升降机构的结构示意图;
14.图2为本实用新型夹取手臂升降机构的升降机构结构示意图;
15.图3为本实用新型夹取手臂升降结构的升降机构结构示意图。
16.图中的标号与名称对应如下:1、机械手臂;2、夹取机构;10、连接座;3、升降机构;30、基板;31、滑轨;32、驱动气缸;33、连接板;34、滑动座;35、安装板;36、行程开关;360、上位感应开关;361、下位感应开关;330、行程开关撞块;340、承接板;350、侧板;37、防护罩;310、限停板。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.请参阅图1-3,本实用新型提供一种技术方案:一种夹取手臂升降机构,包括机械手臂1和与机械手臂1一端固定连接的夹取机构2,夹取机构2主要用于伸进压铸机中夹取工件,机械手臂1另一端设有与之固定安装的连接座10,连接座10设有驱动其升降的升降机构3,升降机构3包括基板30,基板30上分别设有与之固定安装的滑轨31和驱动气缸32,驱动气缸32的驱动端设有与之固定连接的连接板33,连接板33设有与之固定安装的滑动座34,滑动座34与滑轨31限位滑动配合,滑动座34设有与之固定连接的安装板35,滑动座34设有与之固定安装呈l形的承接板340,承接板340的一端与连接板33通过螺栓固定安装,所以连接板33通过承接板340与滑动座34固定安装,安装板35设有与之通过螺栓固定连接的侧板350,侧板350与承接板340的另一端通过螺栓固定连接,所以滑动座34通过使承接板340与侧板350固定连接从而与安装板35固定连接,而安装板35又与连接座10固定安装,所以当机械手臂1需要带动夹取机构2伸入压铸机中夹取形状复杂的工件时,驱动气缸32驱动连接板33升降,连接板33从而带动滑动座34在滑轨31上滑动,因安装板35既与滑动座34固定连接又与连接座10固定安装,所以滑动座34滑动的同时会带动连接座10一起滑动,又因连接座10与机械手臂1固定安装,所以驱动气缸32驱动的同时也会带动机械手臂1从而带动夹取机构2可沿滑轨31方向上下升降滑动,从而能够适用于各种尺寸、形状复杂的工件取出,简化复杂工件取出工序的同时还降低取出难度。
19.在基板30上还设有行程开关36,行程开关36包括分别与基板30固定安装的上位感应开关360和下位感应开关361,在连接板33上设有与之固定安装的行程开关撞块330,行程开关撞块330分别对应上位感应开关360和下位感应开关361设置,上位感应开关360和下位感应开关361用于感应行程开关撞块330与之相互接触,从而发出信号控制驱动气缸32的开停,在基板30一侧还设有与之固定安装的防护罩37用于防止驱动气缸32在工作中受损坏,在滑轨31底端还设有与之固定安装的限停板310,限停板310用于防止滑动座34沿滑轨31向下滑动路径过大从而与滑轨31脱轨。
20.最后应说明的是:以上所述仅为本实用新型的优选实例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种夹取手臂升降机构,包括机械手臂(1)和与机械手臂(1)一端固定连接的夹取机构(2),其特征在于,所述机械手臂(1)另一端设有与之固定安装的连接座(10),所述连接座(10)设有驱动其升降的升降机构(3),所述升降机构(3)包括基板(30),所述基板(30)分别设有与之固定安装的滑轨(31)和驱动气缸(32),所述驱动气缸(32)驱动端设有与之固定连接的连接板(33),所述连接板(33)设有与之固定安装的滑动座(34),所述滑动座(34)与滑轨(31)限位滑动配合,所述滑动座(34)设有与之固定连接的安装板(35),所述安装板(35)与连接座(10)固定安装。2.根据权利要求1所述的夹取手臂升降机构,其特征在于,所述基板(30)上设有行程开关(36),所述行程开关(36)包括分别与基板(30)固定安装的上位感应开关(360)和下位感应开关(361),所述连接板(33)上设有与之固定安装的行程开关撞块(330),所述行程开关撞块(330)分别对应上位感应开关(360)和下位感应开关(361)设置。3.根据权利要求1所述的夹取手臂升降机构,其特征在于,所述滑动座(34)设有与之固定安装的承接板(340),所述承接板(340)呈l形。4.根据权利要求3所述的夹取手臂升降机构,其特征在于,所述承接板(340)一端与连接板(33)固定安装,所述安装板(35)设有与之固定连接的侧板(350),所述侧板(350)与承接板(340)另一端固定连接。5.根据权利要求1所述的夹取手臂升降机构,其特征在于,所述基板(30)设有与之固定安装的防护罩(37)。6.根据权利要求1所述的夹取手臂升降机构,其特征在于,所述滑轨(31)底端设有与之固定安装的限停板(310)。
技术总结
本实用新型涉及压铸机辅助机械领域,具体公开了一种应用于取出机的夹取手臂升降机构,包括机械手臂和与机械手臂一端固定连接的夹取机构,机械手臂另一端设有与之固定安装的连接座,连接座设有驱动其升降的升降机构,该夹取手臂升降机构通过在机械手臂的一端设有与之固定安装的连接座,连接座设有驱动其升降的升降机构,升降机构中的驱动气缸可驱动连接板从而带动滑动座在滑轨上滑动,使滑动座带动安装板从而带动机械手臂能够滑动升降,进而使机械手臂上的夹取机构能够轻松将压铸机中各种形状复杂、尺寸较大的工件轻松取出,简化取出工序的同时降低取出难度。工序的同时降低取出难度。工序的同时降低取出难度。
技术研发人员:张崇明 吴广耀 田润福 廖晓明
受保护的技术使用者:佛山市恩仕自动化设备有限公司
技术研发日:2022.12.26
技术公布日:2023/3/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1