一种机器人组装平台的制作方法
本技术属于机器人组装领域,尤其涉及一种机器人组装平台。
背景技术:
1、机器人(robot)是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。
2、在机器人实际组装过程中,每个零部件之间采用螺栓连接,螺栓的规格存在多种,在组装时,只能将同一规格的螺栓堆积摆放于加工平台上,在组装过程中,螺栓发生散乱导致难以快速找到使用,导致组装效率低。
技术实现思路
1、本实用新型实施例的目的在于提供一种机器人组装平台,旨在解决背景技术中存在的问题。
2、本实用新型实施例是这样实现的,一种机器人组装平台,包括:
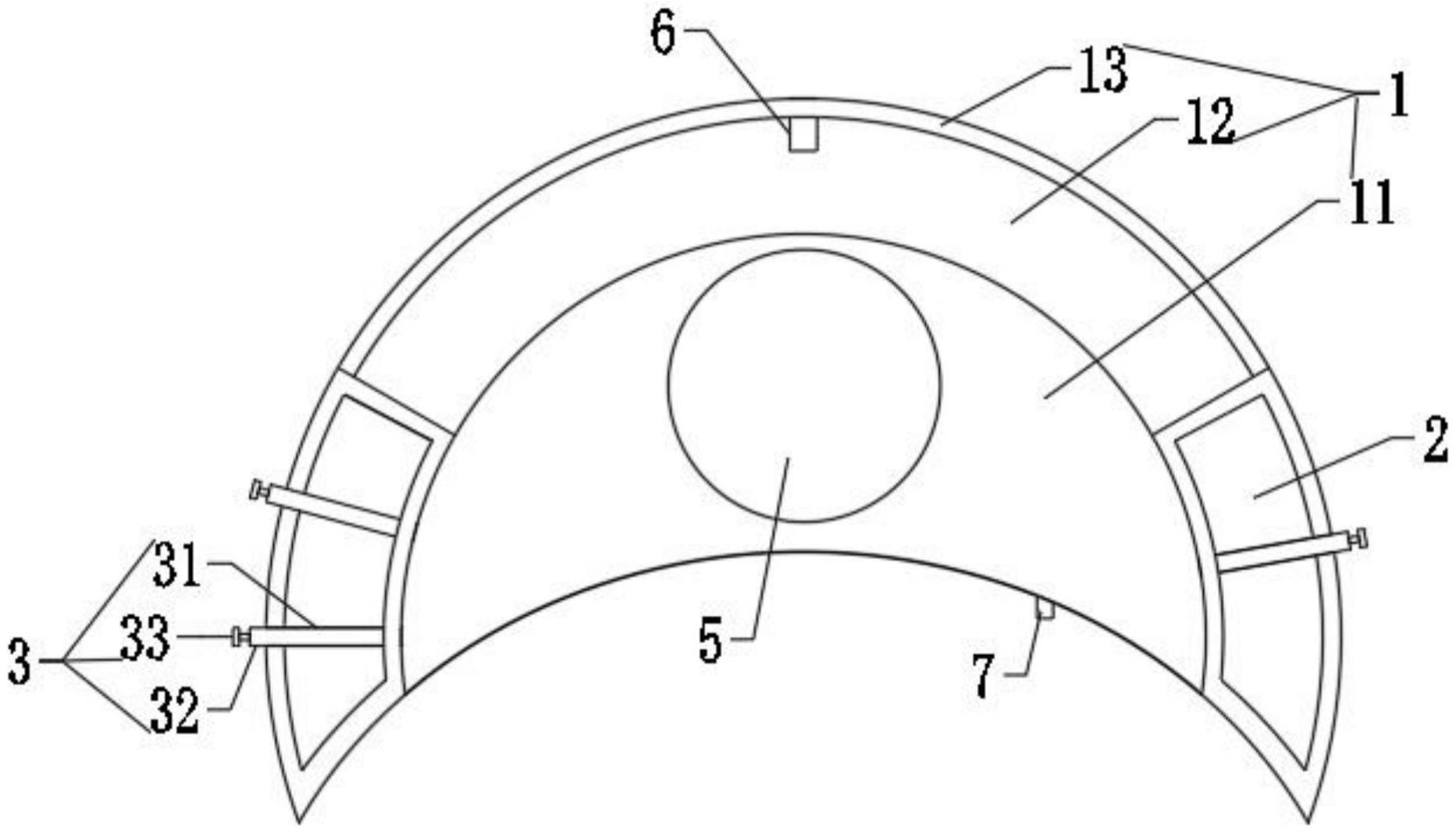
3、组装台,所述组装台固定连接有储物盒,所述储物盒可拆卸式连接有分隔组件,所述组装台活动连接有转台,所述转台活动连接有调节组件,所述调节组件与所述组装台固定连接。
4、作为本实用新型进一步的方案,所述组装台包括残圆台和放置台,所述残圆台与所述放置台固定连接,所述残圆台上设有台孔,所述残圆台通过台孔与所述转台转动连接,所述残圆台与所述储物盒固定连接。
5、作为本实用新型进一步的方案,所述组装台还包括防护板,所述防护板与所述放置台固定连接。
6、作为本实用新型进一步的方案,所述防护板固定连接有照明灯。
7、作为本实用新型进一步的方案,所述储物盒对称分布于所述残圆台两侧。
8、作为本实用新型进一步的方案,所述调节组件包括电机、转轴一、锥齿轮一、锥齿轮二和转轴二,所述电机与所述组装台固定连接,所述电机与所述转轴一固定连接,所述转轴一与所述锥齿轮一固定连接,所述锥齿轮一与所述锥齿轮二固定连接,所述锥齿轮二与所述转轴二固定连接,所述转轴二与所述转台固定连接。
9、作为本实用新型进一步的方案,所述电机电连接有控制器,所述控制器与所述组装台固定连接。
10、作为本实用新型进一步的方案,所述组装台上位于所述控制器处铰接有防误触罩。
11、作为本实用新型进一步的方案,所述分隔组件包括分隔板、型杆和锁紧螺栓,所述分隔板与所述型杆固定连接,所述分隔板配合型杆与所述储物盒卡接,所述型杆与所述锁紧螺栓螺纹连接。
12、与现有技术相比,本实用新型的有益效果是:通过组装台的设置配合储物盒,有利于存放和组装机器人,通过分隔组件与所述储物盒的配合,进一步对零件进行分类,防止零件杂乱,有利于提高组装效率,通过调节组件的设置,有利于减轻组装人员负担,提高组装效率,具有组装效率高的优点。
技术特征:
1.一种机器人组装平台,其特征在于,包括:
2.根据权利要求1所述的一种机器人组装平台,其特征在于,所述组装台包括残圆台和放置台,所述残圆台与所述放置台固定连接,所述残圆台上设有台孔,所述残圆台通过台孔与所述转台转动连接,所述残圆台与所述储物盒固定连接。
3.根据权利要求2所述的一种机器人组装平台,其特征在于,所述组装台还包括防护板,所述防护板与所述放置台固定连接。
4.根据权利要求3所述的一种机器人组装平台,其特征在于,所述防护板固定连接有照明灯。
5.根据权利要求2所述的一种机器人组装平台,其特征在于,所述储物盒对称分布于所述残圆台两侧。
6.根据权利要求1所述的一种机器人组装平台,其特征在于,所述调节组件包括电机、转轴一、锥齿轮一、锥齿轮二和转轴二,所述电机与所述组装台固定连接,所述电机与所述转轴一固定连接,所述转轴一与所述锥齿轮一固定连接,所述锥齿轮一与所述锥齿轮二固定连接,所述锥齿轮二与所述转轴二固定连接,所述转轴二与所述转台固定连接。
7.根据权利要求6所述的一种机器人组装平台,其特征在于,所述电机电连接有控制器,所述控制器与所述组装台固定连接。
8.根据权利要求7所述的一种机器人组装平台,其特征在于,所述组装台上位于所述控制器处铰接有防误触罩。
9.根据权利要求1所述的一种机器人组装平台,其特征在于,所述分隔组件包括分隔板、型杆和锁紧螺栓,所述分隔板与所述型杆固定连接,所述分隔板配合型杆与所述储物盒卡接,所述型杆与所述锁紧螺栓螺纹连接。
技术总结
本技术适用于机器人组装领域,提供了一种机器人组装平台,包括:组装台,所述组装台固定连接有储物盒,所述储物盒可拆卸式连接有分隔组件,所述组装台活动连接有转台,所述转台活动连接有调节组件,所述调节组件与所述组装台固定连接;通过组装台的设置配合储物盒,有利于存放和组装机器人,通过分隔组件与所述储物盒的配合,进一步对零件进行分类,防止零件杂乱,有利于提高组装效率,通过调节组件的设置,有利于减轻组装人员负担,提高组装效率,具有组装效率高的优点。
技术研发人员:郎玉儒,赵德鑫,郑磊,刘永顺,谷牧
受保护的技术使用者:北京航天智造科技发展有限公司
技术研发日:20221227
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!