搬运手臂方位可调的单轴机械手的制作方法
【】本技术涉及机械手,特别涉及搬运手臂方位可调的单轴机械手。
背景技术
0、
背景技术:
1、现有技术的单轴机械手一般只能对机械手某一侧的物品进行直线搬运,如果机械手的两侧均有物品需要搬运时,则需要增加机械手进行搬运或者改变原有机械手的安装位置进行搬运,造成使用不便。
技术实现思路
0、
技术实现要素:
1、为了克服上述问题,本实用新型提出一种可有效解决上述问题的搬运手臂方位可调的单轴机械手。
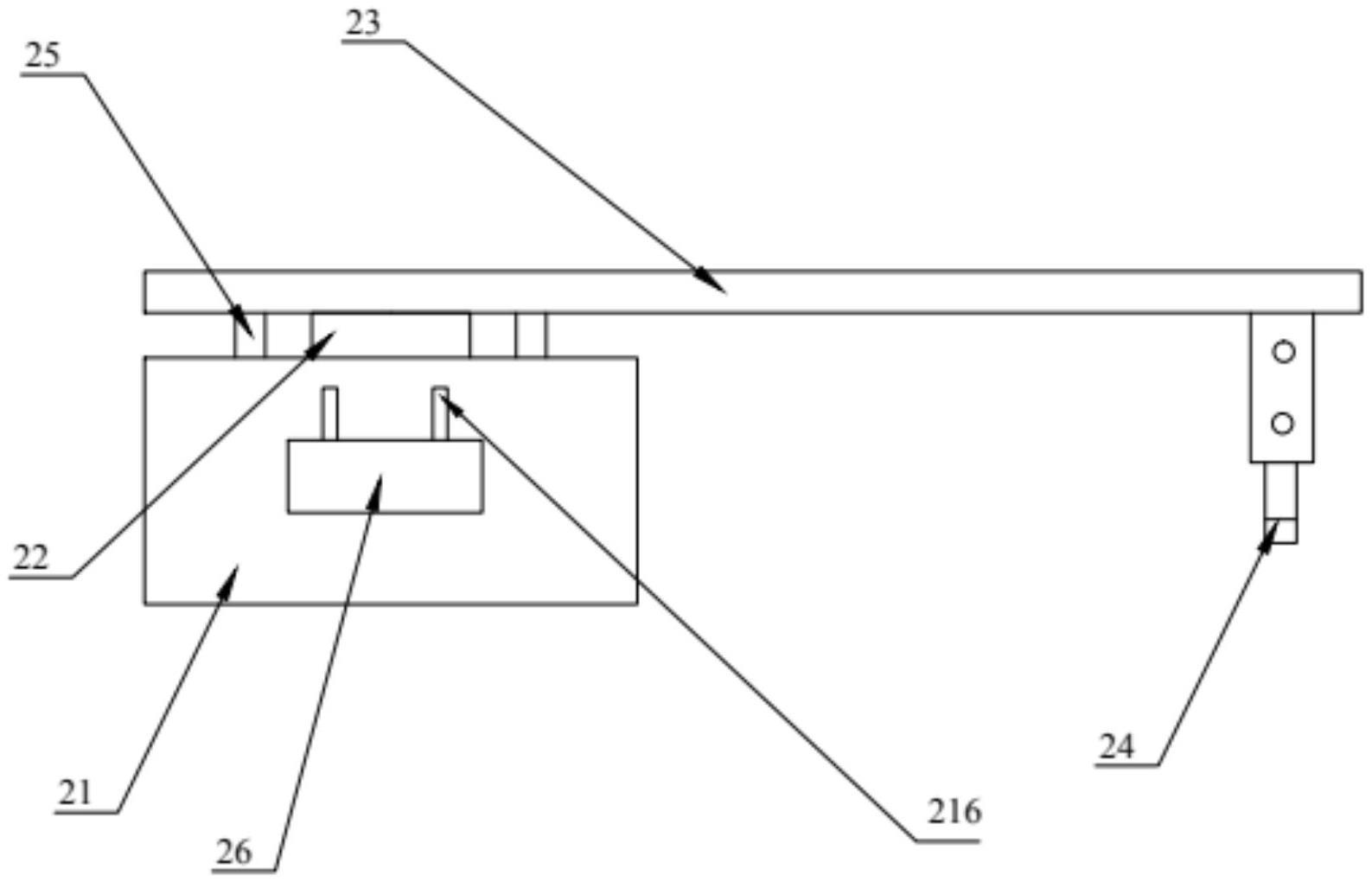
2、本实用新型解决上述技术问题提供的一种技术方案是:提供一种搬运手臂方位可调的单轴机械手,包括直线移动模组和搬运组件,所述直线移动模组设置有滑块,所述搬运组件通过螺丝固定于滑块上,搬运组件跟随滑块来回移动;所述搬运组件包括搬运基座,所述搬运基座的底部通过螺丝固定于滑块,搬运基座的顶部设置有转轴,所述转轴上连接有搬运板,所述搬运板可绕转轴转动,所述搬运板的一端设置有夹爪气缸;所述搬运基座上设置有定位销,所述搬运板上设置有与定位销相匹配的定位孔,定位销插入定位孔内;所述搬运基座的侧部设置有按压板,所述按压板连接于定位销。
3、优选地,所述搬运基座内部设置有伸缩槽,所述伸缩槽内设置有伸缩板,所述定位销连接于伸缩板,定位销从伸缩槽顶部伸出。
4、优选地,所述伸缩板的底部连接有若干弹簧,所述弹簧的一端连接于伸缩板的底部,弹簧的另一端连接于伸缩槽的底部。
5、优选地,所述伸缩板上设置有连接块,所述连接块侧部设置有连接板,所述搬运基座侧部开设有滑槽,所述连接板从滑槽伸出,所述连接板从滑槽伸出的一端连接于按压板。
6、与现有技术相比,本实用新型的搬运手臂方位可调的单轴机械手可以通过转动调节搬运板使得夹爪气缸可分布于机械手的两侧进行搬运,无需额外增加机械手的数量并且无需重新安装机械手的位置即可实现对机械手两侧的物品进行搬运,大大提高了使用便利,使用更加方便,使用体验感更好。
技术特征:
1.搬运手臂方位可调的单轴机械手,其特征在于,包括直线移动模组和搬运组件,所述直线移动模组设置有滑块,所述搬运组件通过螺丝固定于滑块上,搬运组件跟随滑块来回移动;
2.如权利要求1所述的搬运手臂方位可调的单轴机械手,其特征在于,所述搬运基座内部设置有伸缩槽,所述伸缩槽内设置有伸缩板,所述定位销连接于伸缩板,定位销从伸缩槽顶部伸出。
3.如权利要求2所述的搬运手臂方位可调的单轴机械手,其特征在于,所述伸缩板的底部连接有若干弹簧,所述弹簧的一端连接于伸缩板的底部,弹簧的另一端连接于伸缩槽的底部。
4.如权利要求2所述的搬运手臂方位可调的单轴机械手,其特征在于,所述伸缩板上设置有连接块,所述连接块侧部设置有连接板,所述搬运基座侧部开设有滑槽,所述连接板从滑槽伸出,所述连接板从滑槽伸出的一端连接于按压板。
技术总结
本技术涉及机械手技术领域,特别涉及搬运手臂方位可调的单轴机械手,搬运基座的顶部设置有转轴,转轴上连接有搬运板,搬运板可绕转轴转动,搬运板的一端设置有夹爪气缸,搬运基座上设置有定位销,搬运板上设置有与定位销相匹配的定位孔,定位销插入定位孔内,搬运基座的侧部设置有按压板,按压板连接于定位销。与现有技术相比,本技术的搬运手臂方位可调的单轴机械手可以通过转动调节搬运板使得夹爪气缸可分布于机械手的两侧进行搬运,无需额外增加机械手的数量并且无需重新安装机械手的位置即可实现对机械手两侧的物品进行搬运,大大提高了使用便利,使用更加方便,使用体验感更好。
技术研发人员:李江波,陈钰曦
受保护的技术使用者:深圳日华自动化技术有限公司
技术研发日:20221227
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!