一种带有多维碰撞感应的光学透镜对准夹持机构的制作方法
本技术涉及光模块封装,具体涉及一种带有多维碰撞感应的光学透镜对准夹持机构。
背景技术:
1、光模块是光通信的一种核心器件,用于完成对光信号的光到电或电到光的转换,实现光信号和电信号的转换。光模块的主要结构由电路板(pcb)、芯片、透镜和光纤组成,其中芯片安装在电路板上,光纤用于光信号的输入或输出,透镜通常与光纤连接在一起,透镜是光模块的重要组成部分,在光模块接收光信号时,光纤接收到的光信号需要经过透镜折射,聚焦在芯片上,才能有效地转换成电信号,而在输出过程中,电信号转换成的光信号也需要经过透镜折射聚焦后才能从光纤完全传输出去。因此对于透镜的安装位置精度要求非常高。
2、目前,对于透镜的组装绝大多数都采用自动化设备装配,利用视觉配合多轴的角度调节实现透镜的精准安装。当前有一款硅光fa透镜,应客户要求在对准装配过程中需要实时监测产品是否与周边元器件发生接触碰撞。目前行业内一般都用视觉监控来防止透镜组装时,避免造成周边元器件的损坏,但视觉只能从单一方向来判别是否与元器件发生碰撞;有时会出现误判造成透镜与周边元器件的损坏。
3、现有技术中专利公开号为cn212647120u公开了一种透镜的耦合夹具,其包括六轴运动机构以及设置在六轴运动机构活动末端的夹具机构,其中六轴运动机构中包括设置有压力传感器的xy面微调结构,但该压力传感器仅感应透镜在耦合过程中进行微调安装时的压力大小,无法实时监测透镜是否有与周边元器件发生接触碰撞。
4、因此,有必要提供一种新的带有多维碰撞感应的光学透镜对准夹持机构来解决上述技术问题。
技术实现思路
1、本实用新型的主要目的在于提供一种带有多维碰撞感应的光学透镜对准夹持机构,能够从垂直方向和水平方向上实时感应透镜是否有与周边元器件发生接触碰撞,保障透镜对准贴装可靠性和良率。
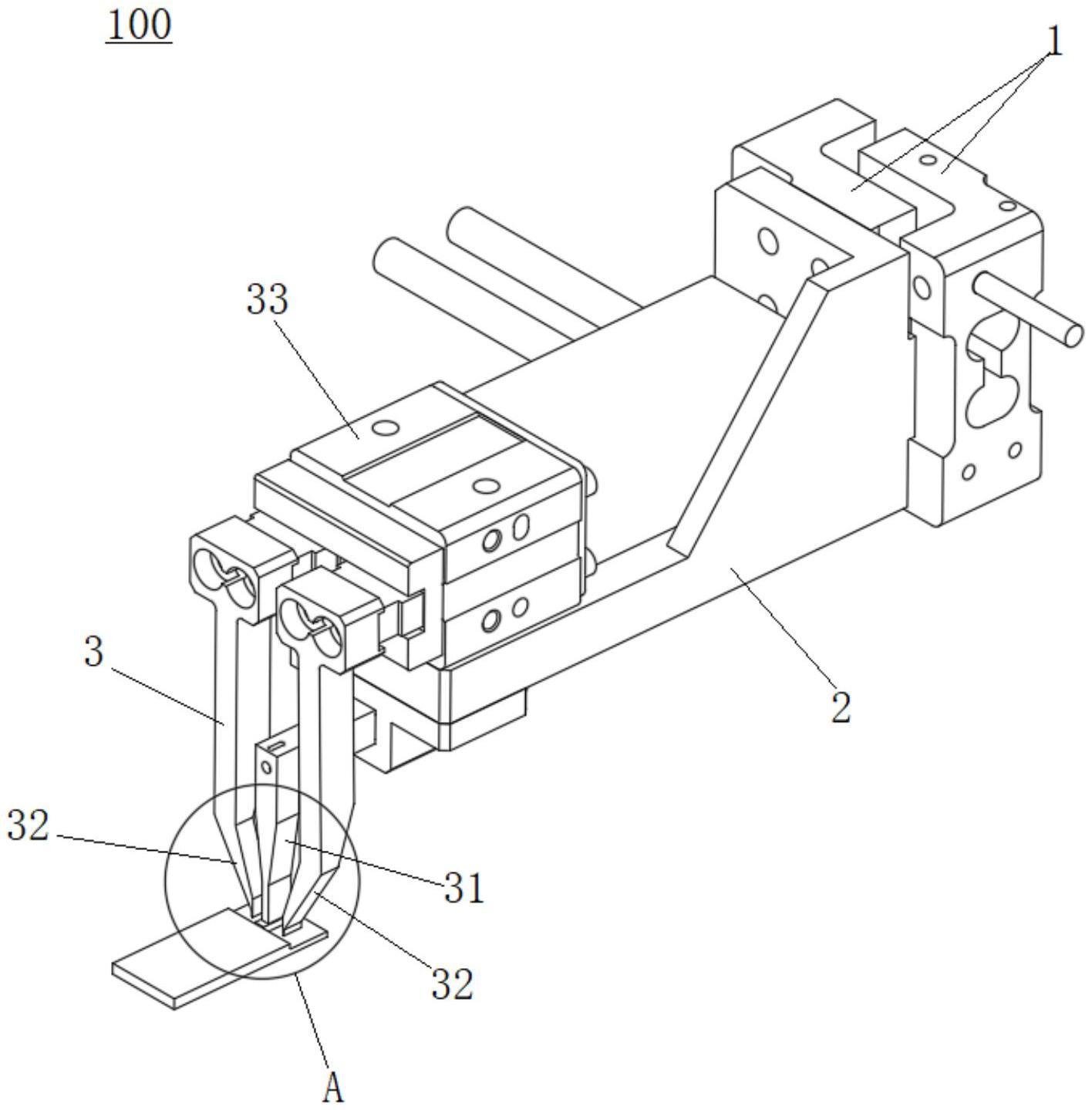
2、为实现上述目的,本实用新型提供如下技术方案:一种带有多维碰撞感应的光学透镜对准夹持机构,其包括设置在多轴运动机构活动末端的多维压力传感器、设置在所述多维压力传感器感应端的安装板以及固定在所述安装板上的夹持模组。
3、进一步的,所述夹持模组包括固定在所述安装板前端的吸附块、位于所述吸附块左右两侧的一对夹爪以及固定在所述安装板上且驱动所述夹爪进行张开与夹持动作的夹爪气缸。
4、进一步的,所述吸附块整体呈l形,自所述安装板的前端向前延伸设置,所述吸附块的下部的宽度与透镜的宽度相当。
5、进一步的,所述吸附块的底部设置有吸附孔。
6、进一步的,所述夹爪的夹持端形成有薄壁结构夹持着透镜的左右侧面。
7、进一步的,所述夹爪气缸设置在所述安装板的前侧,所述夹爪自上而下延伸分布在所述吸附块的左右两侧。
8、进一步的,还包括控制所述多轴运动机构动作的控制器,所述控制器内设置有放大器,所述放大器与所述多维压力传感器电连接,通过所述放大器读取所述多维压力传感器的电压信号。
9、本实用新型一种带有多维碰撞感应的光学透镜对准夹持机构与现有技术相比的有益效果在于:利用高精度多维压力传感器来实现透镜贴装过程中的接触碰撞反馈,提供了更为安全的贴装环境,避免垂直和水平方向带来的撞件事故,提高了耦合效率和减少能耗。
技术特征:
1.一种带有多维碰撞感应的光学透镜对准夹持机构,其特征在于:其包括设置在多轴运动机构活动末端的多维压力传感器、设置在所述多维压力传感器感应端的安装板以及固定在所述安装板上的夹持模组。
2.如权利要求1所述的带有多维碰撞感应的光学透镜对准夹持机构,其特征在于:所述夹持模组包括固定在所述安装板前端的吸附块、位于所述吸附块左右两侧的一对夹爪以及固定在所述安装板上且驱动所述夹爪进行张开与夹持动作的夹爪气缸。
3.如权利要求2所述的带有多维碰撞感应的光学透镜对准夹持机构,其特征在于:所述吸附块整体呈l形,自所述安装板的前端向前延伸设置,所述吸附块的下部的宽度与透镜的宽度相当。
4.如权利要求3所述的带有多维碰撞感应的光学透镜对准夹持机构,其特征在于:所述吸附块的底部设置有吸附孔。
5.如权利要求2所述的带有多维碰撞感应的光学透镜对准夹持机构,其特征在于:所述夹爪的夹持端形成有薄壁结构夹持着透镜的左右侧面。
6.如权利要求5所述的带有多维碰撞感应的光学透镜对准夹持机构,其特征在于:所述夹爪气缸设置在所述安装板的前侧,所述夹爪自上而下延伸分布在所述吸附块的左右两侧。
7.如权利要求1所述的带有多维碰撞感应的光学透镜对准夹持机构,其特征在于:还包括控制所述多轴运动机构动作的控制器,所述控制器内设置有放大器,所述放大器与所述多维压力传感器电连接,通过所述放大器读取所述多维压力传感器的电压信号。
技术总结
本技术公开了一种带有多维碰撞感应的光学透镜对准夹持机构,其包括设置在多轴运动机构活动末端的多维压力传感器、设置在所述多维压力传感器感应端的安装板以及固定在所述安装板上的夹持模组。本技术能够从垂直方向和水平方向上实时感应透镜是否有与周边元器件发生接触碰撞,保障透镜对准贴装可靠性和良率。
技术研发人员:罗超,徐凯,刘乃辉
受保护的技术使用者:苏州猎奇智能设备有限公司
技术研发日:20221228
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!