一种建筑放线作业机器人及放线喷墨系统的制作方法
本发明涉及建筑放样领域,尤其涉及一种建筑放线作业机器人及放线喷墨系统。
背景技术:
1、在建筑行业中,建筑放线是建筑施工过程中为方便工人施工作业,按照设计图纸要求,在施工地面上画出建筑构件的基准线。工人以此基准线为准,进行钢筋绑扎、墙板安装等建筑作业,确保建设工程按设计要求安全顺利地进行。
2、目前施工放线的作业方式普遍是,放线工人采用测量设备在作业平面上标记出直线段的两个端点,然后用墨斗在此两端点之间弹出墨线,往往需要2~4人为一组进行作业。该方式作业效率较低,且放线作业精度依赖放线工人的技术能力和经验,在建设工程中因施工放线误差和错误导致的建筑质量问题层出不穷,造成经济损失和时间损失尤为突出。
3、虽然目前曾有公开文献“一种自动放线喷墨系统及方法(授权公告号为cn108179883)”对自动放线方法进行过研究,然而,该对比文件中,是利用定位器发射一个激光点,机器人追着激光点跑,这种方式对地面平整度有一定要求,由于在建筑工地上,地面往往是凹凸不平的,因而当激光点照射到凹凸不平的地面时,激光点的位置会发生偏移,机器人检测到的激光点位置就会产生误差,大大影响放线精准率。
技术实现思路
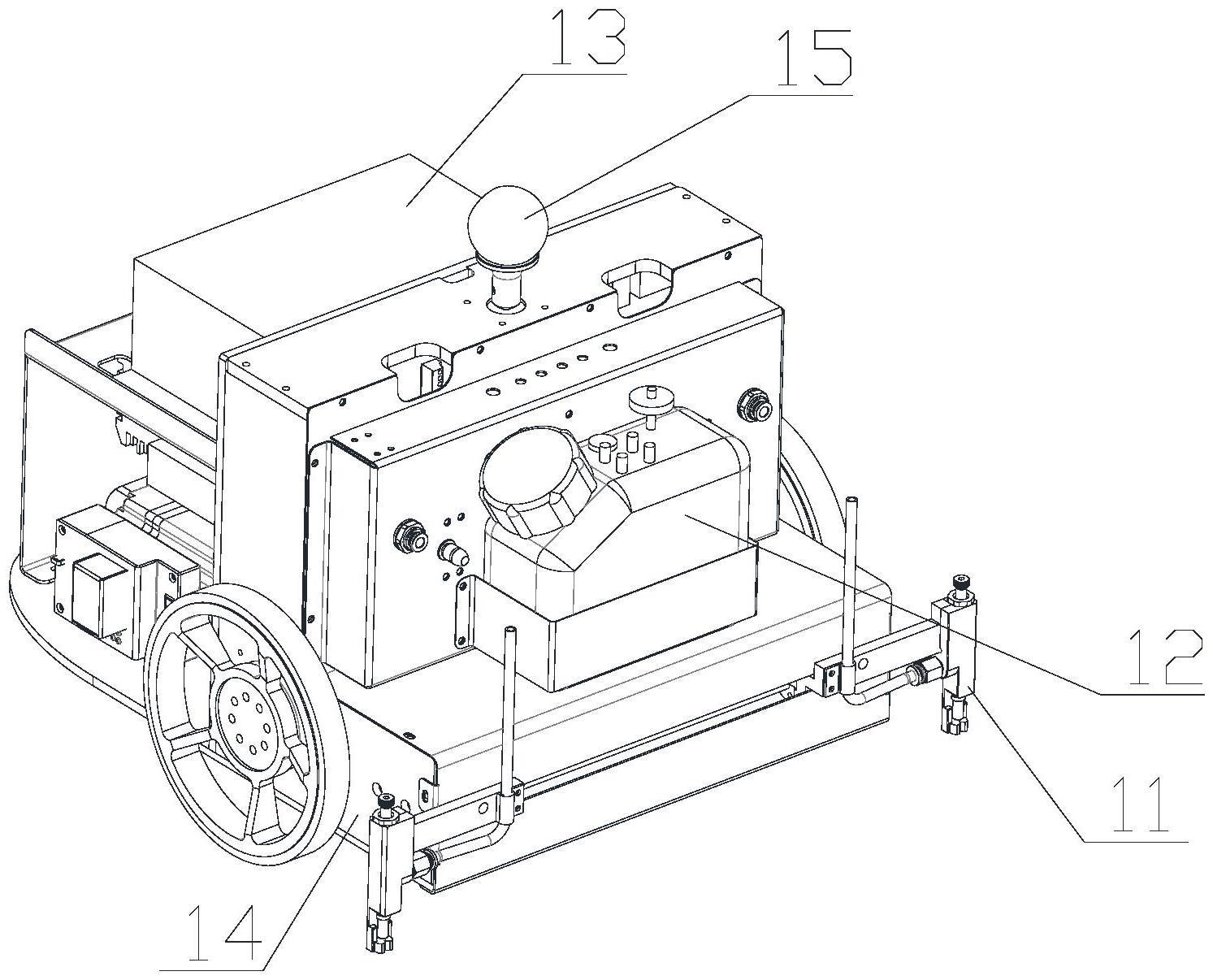
1、本发明提供一种建筑放线作业机器人,包括供墨系统、控制系统、行走放线模组和机器人主体,所述控制系统与供墨系统、行走放线模组、机器人主体通信,所述供墨系统用于给所述行走放线模组放线供墨,且所述行走放线模组在控制系统驱动下可实现放线的间距调节。
2、作为优选,所述行走放线模组包括喷头可调喷墨装置,所述喷头可调喷墨装置包括安装板、设于安装板上的丝杆组件、通过所述丝杆组件进行调节的至少一个喷头组件,还包括设于安装板上的光电开关和设于喷头组件上的感应片,所述感应片和感应开关用于确定所述喷头组件的零点位置,所述丝杆组件用于将喷头组件调节至预设位置,所述喷头组件由供墨系统供墨并进行喷墨。
3、作为优选,所述喷头组件包括用于连接丝杆组件的丝杆螺母、所述丝杆螺母通过滑块连接至喷头,所述滑块沿所述丝杆组件滑动,所述喷头下端连接有喷嘴,所述喷头侧端通过墨管接头连接至供墨系统。
4、作为优选,所述喷头包括管壁和设于管壁内可沿管壁活塞运动的活塞杆,所述活塞杆底端连接至喷嘴,所述活塞杆顶端连接至活塞驱动机构,所述活塞杆内设有纵向通孔和横向通孔,所述纵向通孔与喷头连通,所述横向通孔在喷墨工作时通过所述墨管接头与供墨系统连通。
5、作为优选,所述供墨系统包括通过墨管与喷头组件连通的墨箱,还包括墨泵、过滤器、节流阀和单向阀,所述墨泵从墨箱中泵取墨水经过滤器后分为两路,第一路经单向阀和节流阀后回流到墨箱中,第二路向喷头组件供墨,通过控制墨泵启停来控制喷头组件是否喷墨。
6、作为优选,所述放线作业机器人上设有陀螺仪。
7、作为优选,所述放线作业机器人上设有用于探测行进方向障碍的激光雷达。
8、本发明还提供一种建筑放线作业机器人放线喷墨系统,包括:
9、楼面cad数据:所需楼面cad数据为放线作业的建筑楼面cad数据,包括放线作业所需的全部楼面信息;
10、路径规划程序:可将楼面cad数据处理后生成放线作业机器人可识别的放线作业路径数据;
11、终端:终端上安装有操控软件,操作人员通过该操控软件导入放线作业路径数据,且可对放线作业路径数据进行仿真,终端与放线作业机器人和激光追踪测量仪进行通信,操作人员通过终端操控放线作业机器人和激光追踪测量仪,同时也可查看放线作业机器人和激光追踪测量仪的状态信息;
12、放线作业机器人:放线作业机器人与终端和自动追踪测量设备进行通信,放线作业机器人上安装有定位棱镜;
13、激光追踪测量仪:激光追踪测量仪与人工控制端和放线作业机器人进行通信,在工作中,激光追踪测量仪用于追踪放线作业机器人上的定位棱镜,并测量出当前放线作业机器人相对于激光追踪测量仪的坐标,然后向放线作业机器人发送位置测量信息。
14、采用了上述技术方案,本发明具有以下的有益效果:(1)本发明通过激光追踪测量仪检测放线作业机器人上的定位棱镜,可以很大程度上避免地面不平整造成的影响,定位和放线极其精准;采用放线作业机器人替代人工进行放线作业,减少了人工需求,也降低了工人的工作强度,同时提高了作业效率,缩短了建筑施工周期。
15、(2)本发明采用高精度激光追踪测量仪和陀螺仪进行数据融合导航,提升了放线作业的精度,确保了放线作业的质量。
16、(3)本发明采用激光追踪测量仪和陀螺仪组合导航,不依赖视觉,可全天候使用,满足白天和夜晚施工需求。
17、(4)本发明安装有激光雷达(也在机器人上,用来检测障碍物),可在工作中探测行进方向障碍,并自动避障。
18、(5)本发明采用模块化设计方式,简化了设备组装和维修,降低了设备故障对施工造成的影响。
19、(6)本发明通过路径规划程序自动生成优化放线作业路径,减少了放线作业行走距离,提高作业效率。
20、(7)本发明的供墨系统应用于放线作业机器人上,实现了放线作业功能;系统组成简单可靠,降低了设备使用过程的故障频率;采用节流阀实现了对供墨压力的调节;采用单向阀避免了不工作时喷头漏墨问题;采用模块化设计方式,简化了设备组装和维修,降低了设备故障对施工造成的影响。
21、(8)本发明供墨系统在确保墨线清晰的情况下,降低了墨水使用量,降低了在放线作业中的使用成本,
22、(9)本发明中的喷头可调喷墨装置实现了放线作业机器人喷头位置及宽度的自动调整,方便更换喷嘴,且实现了喷嘴定位。
23、(10)本装置采用活塞上下移动,本装置结构紧凑,简单可靠,在实现功能的且方便用户的同时,降低了整体重量,方便集成到放线作业机器人当中来通断墨路和插拔喷嘴,方便用户操作的同时,确保喷嘴更换时阻断墨路。
技术特征:
1.一种建筑放线作业机器人,其特征在于:包括供墨系统(12)、控制系统(13)、行走放线模组(11)和机器人主体(14),所述控制系统与供墨系统、行走放线模组、机器人主体通信,所述供墨系统用于给所述行走放线模组放线供墨,且所述行走放线模组在控制系统驱动下可实现放线的间距调节。
2.根据权利要求1所述的建筑放线作业机器人,其特征在于:所述行走放线模组包括喷头可调喷墨装置,所述喷头可调喷墨装置包括安装板(11-1)、设于安装板上的丝杆组件(11-2)、通过所述丝杆组件进行调节的至少一个喷头组件(11-3),还包括设于安装板上的光电开关(11-4)和设于喷头组件上的感应片(11-5),所述感应片和感应开关用于确定所述喷头组件的零点位置,所述丝杆组件用于将喷头组件调节至预设位置,所述喷头组件由供墨系统供墨并进行喷墨。
3.根据权利要求2所述的建筑放线作业机器人,其特征在于:所述喷头组件包括用于连接丝杆组件的丝杆螺母(11-3-1)、所述丝杆螺母通过滑块(11-3-2)连接至喷头(11-3-3),所述滑块沿所述丝杆组件滑动,所述喷头下端连接有喷嘴(11-3-4),所述喷头侧端通过墨管接头(11-3-5)连接至供墨系统。
4.根据权利要求3所述的建筑放线作业机器人,其特征在于:所述喷头包括管壁和设于管壁内可沿管壁活塞运动的活塞杆(11-3-41),所述活塞杆底端连接至喷嘴,所述活塞杆顶端连接至活塞驱动机构(11-3-42),所述活塞杆内设有纵向通孔(11-3-43)和横向通孔(11-3-44),所述纵向通孔与喷头连通,所述横向通孔在喷墨工作时通过所述墨管接头与供墨系统连通。
5.根据权利要求1所述的建筑放线作业机器人,其特征在于:所述供墨系统(12)包括通过墨管(12-1)与喷头组件连通的墨箱(12-2),还包括墨泵(12-3)、过滤器(12-4)、节流阀(12-5)和单向阀(12-6),所述墨泵从墨箱中泵取墨水经过滤器后分为两路,第一路经单向阀和节流阀后回流到墨箱中,第二路向喷头组件供墨,通过控制墨泵启停来控制喷头组件是否喷墨。
6.根据权利要求1所述的建筑放线作业机器人,其特征在于:所述放线作业机器人上设有陀螺仪。
7.根据权利要求1所述的建筑放线作业机器人,其特征在于:所述放线作业机器人上设有用于探测行进方向障碍的激光雷达。
8.一种建筑放线作业机器人放线喷墨系统,其特征在于:包括:
技术总结
本发明公开了一种建筑放线作业机器人,包括供墨系统、控制系统、行走放线模组和机器人主体,所述控制系统与供墨系统、行走放线模组、机器人主体通信,所述供墨系统用于给所述行走放线模组放线供墨,且所述行走放线模组在控制系统驱动下可实现放线的间距调节。本发明可避免地面不平整对喷墨放线造成的影响,定位和放线极其精准。
技术研发人员:刘紫敬,程志军,黎领,曾贤根,谭石平,胡传明,赵中文,任超洋,张周强
受保护的技术使用者:湖南固工机器人有限公司
技术研发日:20221223
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!