夹爪装置及其机械手的制作方法
本技术涉及物品取放装置,特别涉及一种夹爪装置及其机械手。
背景技术:
1、电芯等产品受到一定力度的挤压后就会使电压变高,影响安全性,因此,输送或安装电芯等产品会使用到夹爪装置。相关技术中,夹爪装置上一般设置有多种类型的气缸,以实现夹取产品和轴向移动的目的。但是现有的夹爪装置结构设计存在缺陷,夹取产品的气缸组件设置在负责竖直移动的气缸上,结构不平衡,导致负责竖直移动的气缸负载过大,使夹爪装置运动不平稳,气缸使用寿命变短。
技术实现思路
1、本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种夹爪装置,能够平衡轴向移动的气缸上的负载,使夹爪装置运行平稳,增加气缸使用寿命。
2、本实用新型还提出一种具有上述夹爪装置的机械手。
3、根据本实用新型的第一方面实施例的夹爪装置,包括:
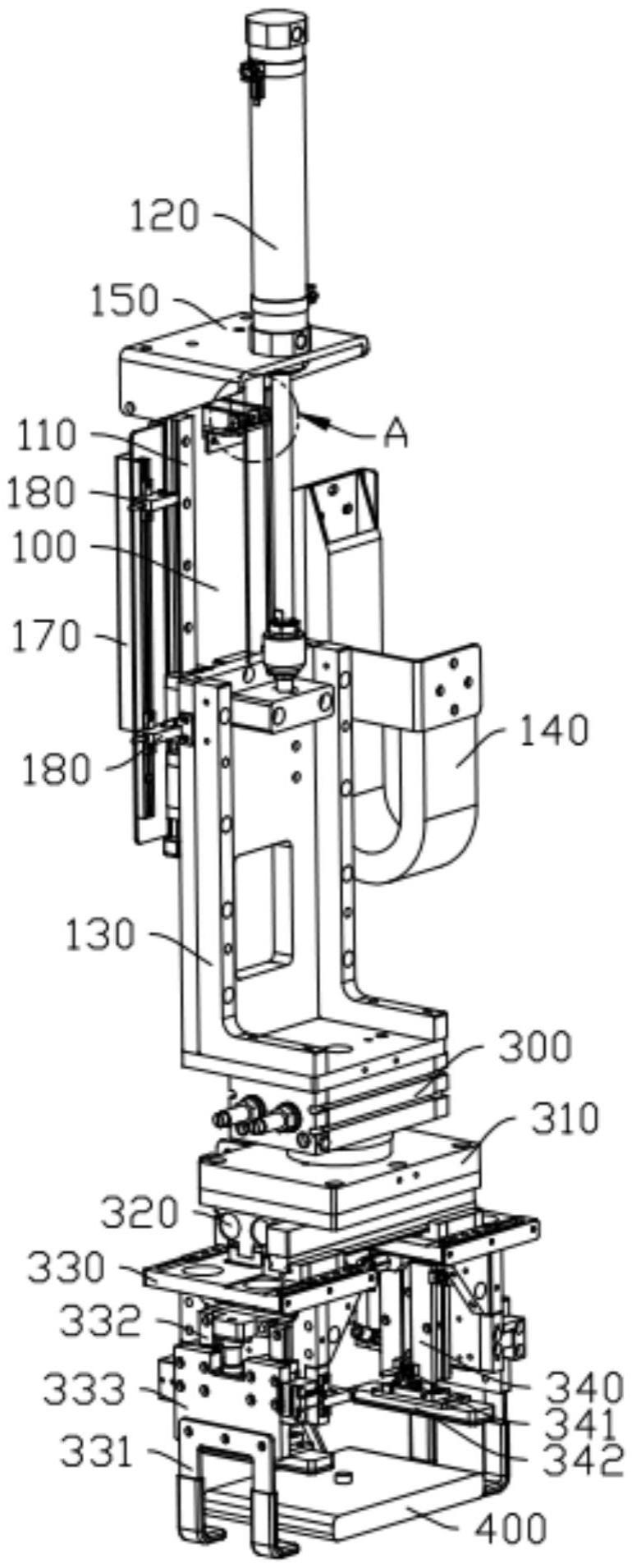
4、驱动组件,包括第一安装板、第一导轨、第一气缸和移动件,所述第一导轨竖直设置于所述第一安装板,所述移动件滑动设置于所述第一导轨,所述第一气缸设置于所述第一安装板,并连接所述移动件,以驱动所述移动件运动;
5、夹取组件,设置于所述移动件,并能够夹取电芯;
6、平衡组件,包括第二导轨、配重块连接绳,所述第二导轨竖直设置于所述第一安装板远离所述第一导轨的一面,所述配重块滑动设置于所述第二导轨,所述连接绳的一端连接所述移动件的顶部,另一端连接所述配重块的顶部,以使所述配重块和所述移动件朝相反方向运动。
7、根据本实用新型实施例的夹爪装置,至少具有如下有益效果:夹爪装置设置有平衡组件用于平衡夹爪负载,优化了竖直安装气缸的使用环境,在传统结构上增加平衡块,可避免竖直安装气缸在伸出和缩回的时候受到整个夹取组件的重力,使得气缸运行平稳。
8、根据本实用新型的一些实施例,所述平衡组件还包括导向轮,所述导向轮设置于所述第一安装板,并能够支撑所述连接绳以及引导所述连接绳运动。
9、根据本实用新型的一些实施例,所述第一安装板设置有第一检测器,并能够检测所述移动件的位置。
10、根据本实用新型的一些实施例,所述夹取组件包括第二气缸、第二安装板、第三气缸和两个夹块,所述第二气缸设置于所述移动件远离所述连接绳的一端,所述第二安装板转动设置于所述第二气缸,所述第三气缸设置于所述第二安装板,所述两个夹块滑动设置于所述第三气缸,并能够相互靠近和远离。
11、根据本实用新型的一些实施例,所述夹块设置有夹爪,所述夹爪为l型块。
12、根据本实用新型的一些实施例,所述夹块设置有第三导轨,所述第三导轨滑动设置有第四气缸,所述夹爪设置于所述第四气缸。
13、根据本实用新型的一些实施例,所述夹块还设置有第五气缸,所述第五气缸能够将所述电芯压紧于所述l型块。
14、根据本实用新型的一些实施例,所述第五气缸设置有第二检测器,并能够检测所述第五气缸的压板位置。
15、根据本实用新型的一些实施例,所述第二安装板设置有第三检测器,并能够检测被所述夹块夹取的所述电芯。
16、根据本实用新型的第二方面实施例的机械手,包括:
17、如本实用新型的第一方面实施例的夹爪装置。
18、根据本实用新型实施例的机械手,至少具有如下有益效果:机械手运行平稳,夹爪装置结构简洁,安装操作简单。
19、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.夹爪装置,其特征在于,包括:
2.根据权利要求1所述的夹爪装置,其特征在于,所述平衡组件还包括导向轮,所述导向轮设置于所述第一安装板,并能够支撑所述连接绳以及引导所述连接绳运动。
3.根据权利要求1所述的夹爪装置,其特征在于,所述第一安装板设置有第一检测器,并能够检测所述移动件的位置。
4.根据权利要求1所述的夹爪装置,其特征在于,所述夹取组件包括第二气缸、第二安装板、第三气缸和两个夹块,所述第二气缸设置于所述移动件远离所述连接绳的一端,所述第二安装板转动设置于所述第二气缸,所述第三气缸设置于所述第二安装板,所述两个夹块滑动设置于所述第三气缸,并能够相互靠近和远离。
5.根据权利要求4所述的夹爪装置,其特征在于,所述夹块设置有夹爪,所述夹爪为l型块。
6.根据权利要求5所述的夹爪装置,其特征在于,所述夹块设置有第三导轨,所述第三导轨滑动设置有第四气缸,所述夹爪设置于所述第四气缸。
7.根据权利要求6所述的夹爪装置,其特征在于,所述夹块还设置有第五气缸,所述第五气缸能够将所述电芯压紧于所述l型块。
8.根据权利要求7所述的夹爪装置,其特征在于,所述第五气缸设置有第二检测器,并能够检测所述第五气缸的压板位置。
9.根据权利要求4所述的夹爪装置,其特征在于,所述第二安装板设置有第三检测器,并能够检测被所述夹块夹取的所述电芯。
10.机械手,其特征在于,包括:
技术总结
本技术公开了一种夹爪装置,包括:驱动组件,包括第一安装板、第一导轨、第一气缸和移动件,所述第一导轨竖直设置于所述第一安装板,所述移动件滑动设置于所述第一导轨,所述第一气缸设置于所述第一安装板,并连接所述移动件,以驱动所述移动件运动;夹取组件,设置于所述移动件,并能够夹取电芯;平衡组件,包括第二导轨、配重块连接绳,所述第二导轨竖直设置于所述第一安装板远离所述第一导轨的一面,所述配重块滑动设置于所述第二导轨,所述连接绳的一端连接所述移动件的顶部,另一端连接所述配重块的顶部,以使所述配重块和所述移动件朝相反方向运动。夹爪装置能够平衡轴向移动的气缸上的负载,使夹爪装置运行平稳。
技术研发人员:罗胜根,何青,谢思良
受保护的技术使用者:南昌欣旺达新能源有限公司
技术研发日:20221229
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!