一种行走机器人雷达水平自调整装置及行走机器人的制作方法
本技术涉及用于运送货物的行走机器人,尤其涉及一种行走机器人雷达水平自调整装置及具有该装置的行走机器人。
背景技术:
1、移动机器人包括amr(自主移动机器人)、无人叉车等,为了在行驶过程中保证安全,避免与周围环境(人、设备或者其它车辆)发生碰撞,一般会在机器人上安装用于障碍物检测的激光雷达,以实时检测机器人周围可能与其发生碰撞的物体,当激光雷达检测到可能会与机器人发生碰撞的物体时,机器人将根据安全策略,实施保证安全的动作,如停车或者绕开行驶,从而实现避障功能。
2、请参见图6,以无人叉车为例,通常会在其行进的前方安装1或2个激光雷达,对叉车前行的方向以及两侧进行实时的障碍物检测,激光雷达固定安装于车的底盘上,通常以单束激光进行平面扫描,扫描平面平行于地面;
3、请参见图7,现有固定安装雷达的方式中,雷达的扫描平面与车体相对固定,当车体行至凹凸不平的地面(如地面有坑洼时,会导致车体发生颠婆、倾斜,此时,雷达的扫描平面也随车体发生倾斜,导致地面进入了雷达检测范围而被判断为障碍物,使机器人的避障功能被误触发,不能实现准确避障。
技术实现思路
1、本实用新型要解决的技术问题在于,针对现有技术的不足,提供一种能够对激光雷达的水平状态进行自调整,即使发生异常倾斜,也能保证雷达扫描平面处于水平状态的行走机器人雷达水平自调整装置及行走机器人。
2、为解决上述技术问题,本实用新型采用如下技术方案。
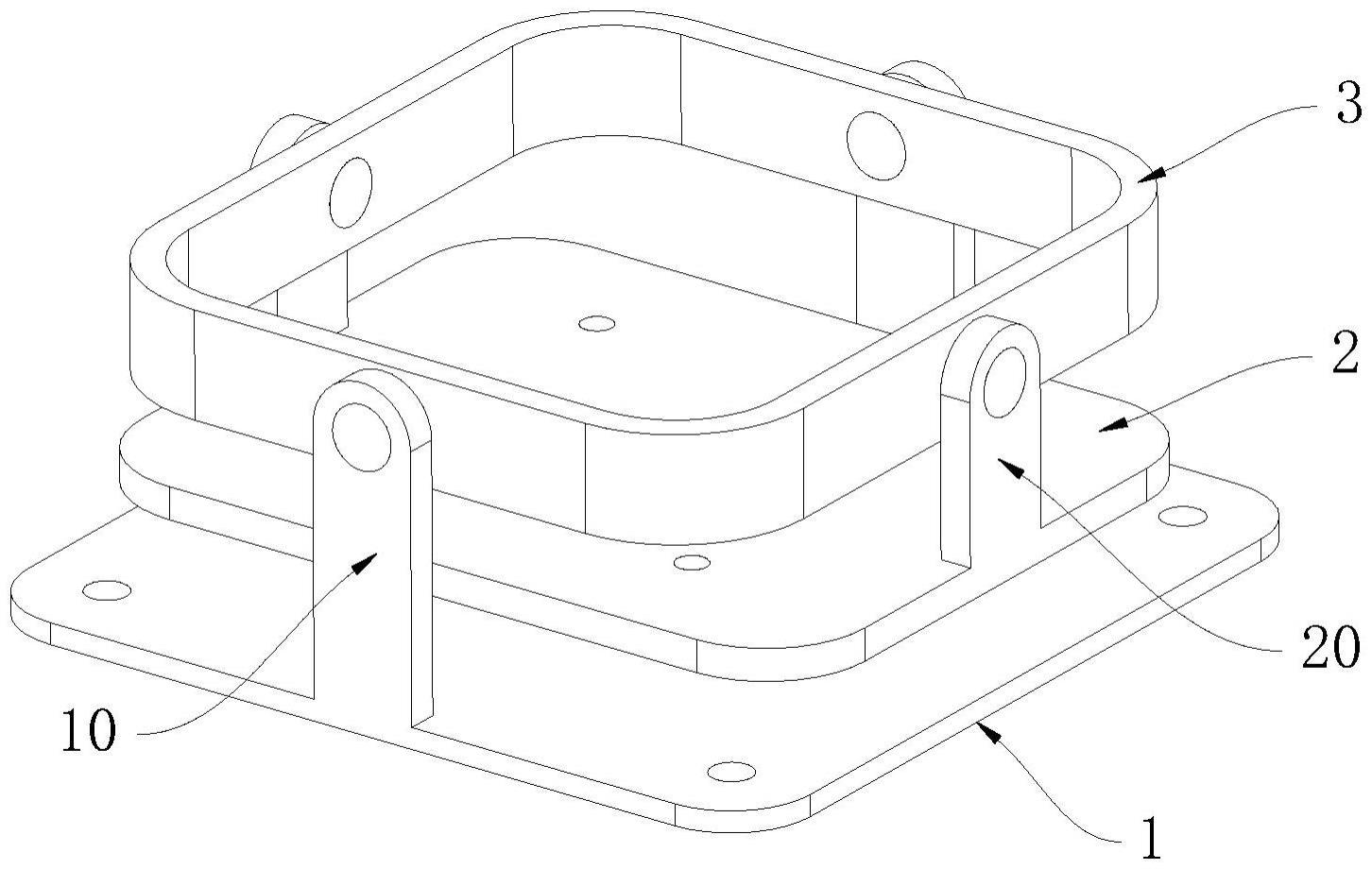
3、一种行走机器人雷达水平自调整装置,其包括有底座、载台和平衡环,所述载台用于固定激光雷达,所述底座上设有两个左右对称设置的第一竖直支臂,两个第一竖直支臂分别与所述平衡环的左右两端转动连接,所述载台上设有两个前后对称设置的第二竖直支臂,两个第二竖直支臂分别与所述平衡环的前后两端转动连接,两个第二竖直支臂之间的连线与两个第一竖直支臂之间的连线相互垂直。
4、优选地,所述平衡环位于两个第一竖直支臂之间。
5、优选地,所述平衡环位于两个第二竖直支臂之间。
6、优选地,所述平衡环为方形环,所述载台为方形载台。
7、优选地,所述底座上开设有多个第一固定孔位,所述载台上开设有多个第二固定孔位。
8、优选地,两个第一竖直支臂的上端分别设有第一转轴,所述平衡环的左右两端分别嵌设有与所述第一转轴相连接的第一阻尼轴承。
9、优选地,两个第二竖直支臂的上端分别设有第二转轴,所述平衡环的前后两端分别嵌设有与所述第二转轴相连接的第二阻尼轴承。
10、一种行走机器人,其包括有上述雷达水平自调整装置。
11、本实用新型公开的行走机器人雷达水平自调整装置中,因所述平衡环的左右两端转动连接于所述底座上的两个第一竖直支臂,同时所述平衡环的前后两端转动连接于所述载台上的两个第二竖直支臂,所以当激光雷达固定于所述载台上,且所述底座安装固定于行走机器人上时,基于所述平衡环前后两侧和左右两侧的转动配合关系,使得所述载台和激光雷达在自身重力作用下自动保持水平,并且能够在机器人行走过程中对激光雷达的水平状态进行自调整,即使机器人的行驶路面发生异常倾斜,也能保证雷达扫描平面处于水平状态,从而避免因扫描到地面而误触发避障功能,以及保证行走机器人可靠运行。
技术特征:
1.一种行走机器人雷达水平自调整装置,其特征在于,包括有底座(1)、载台(2)和平衡环(3),所述载台(2)用于固定激光雷达,所述底座(1)上设有两个左右对称设置的第一竖直支臂(10),两个第一竖直支臂(10)分别与所述平衡环(3)的左右两端转动连接,所述载台(2)上设有两个前后对称设置的第二竖直支臂(20),两个第二竖直支臂(20)分别与所述平衡环(3)的前后两端转动连接,两个第二竖直支臂(20)之间的连线与两个第一竖直支臂(10)之间的连线相互垂直。
2.如权利要求1所述的行走机器人雷达水平自调整装置,其特征在于,所述平衡环(3)位于两个第一竖直支臂(10)之间。
3.如权利要求2所述的行走机器人雷达水平自调整装置,其特征在于,所述平衡环(3)位于两个第二竖直支臂(20)之间。
4.如权利要求1所述的行走机器人雷达水平自调整装置,其特征在于,所述平衡环(3)为方形环、圆形环、椭圆形环或异形多边形环,所述载台(2)为方形载台、圆形载台、椭圆形载台或异形多边形载台。
5.如权利要求1所述的行走机器人雷达水平自调整装置,其特征在于,所述底座(1)上开设有多个第一固定孔位(11),所述载台(2)上开设有多个第二固定孔位(21)。
6.如权利要求1所述的行走机器人雷达水平自调整装置,其特征在于,两个第一竖直支臂(10)的上端分别设有第一转轴(12),所述平衡环(3)的左右两端分别嵌设有与所述第一转轴(12)相连接的第一阻尼轴承。
7.如权利要求1所述的行走机器人雷达水平自调整装置,其特征在于,两个第二竖直支臂(20)的上端分别设有第二转轴(22),所述平衡环(3)的前后两端分别嵌设有与所述第二转轴(22)相连接的第二阻尼轴承。
8.一种行走机器人,其特征在于,包括有权利要求1至7任一项所述的雷达水平自调整装置。
技术总结
本技术公开了一种行走机器人雷达水平自调整装置及行走机器人,其包括有底座、载台和平衡环,所述载台用于固定激光雷达,所述底座上设有两个左右对称设置的第一竖直支臂,两个第一竖直支臂分别与所述平衡环的左右两端转动连接,所述载台上设有两个前后对称设置的第二竖直支臂,两个第二竖直支臂分别与所述平衡环的前后两端转动连接,两个第二竖直支臂之间的连线与两个第一竖直支臂之间的连线相互垂直。本技术能够在机器人行走过程中对激光雷达的水平状态进行自调整,即使机器人的行驶路面发生异常倾斜,也能保证雷达扫描平面处于水平状态,从而避免因扫描到地面而误触发避障功能,以及保证行走机器人可靠运行。
技术研发人员:兰伟
受保护的技术使用者:稳石机器人(深圳)有限公司
技术研发日:20221229
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!