一种机械手的制作方法
本技术涉及机械手,特别是涉及一种机械手。
背景技术:
1、在粮食、化肥、饲料等编织袋包装物(软体包装物)进行抓取工作,抓取效率通常很低,工作人员为了提高生产效率,往往会使用到机器人配合机械手对包装物的定点抓取,机械手具有转向灵活,升降自如,且抓取时动作柔和,然而市面上出现的一种机械手仍存在各种各样的不足,不能够满足生产的需求。
2、现有的机械手在对麻袋等进行抓包时,其一端的夹紧力较大容易导致麻袋损坏,现有机械手抓取时,麻袋与机械手接触面受力不均,从而影响抓包的问题,为此我们提出一种机械手。
技术实现思路
1、针对上述问题,本实用新型提出一种机械手,以解决上述背景技术中提出,麻袋与机械手接触面受力不均,从而影响抓包的问题。
2、本实用新型的技术方案是:
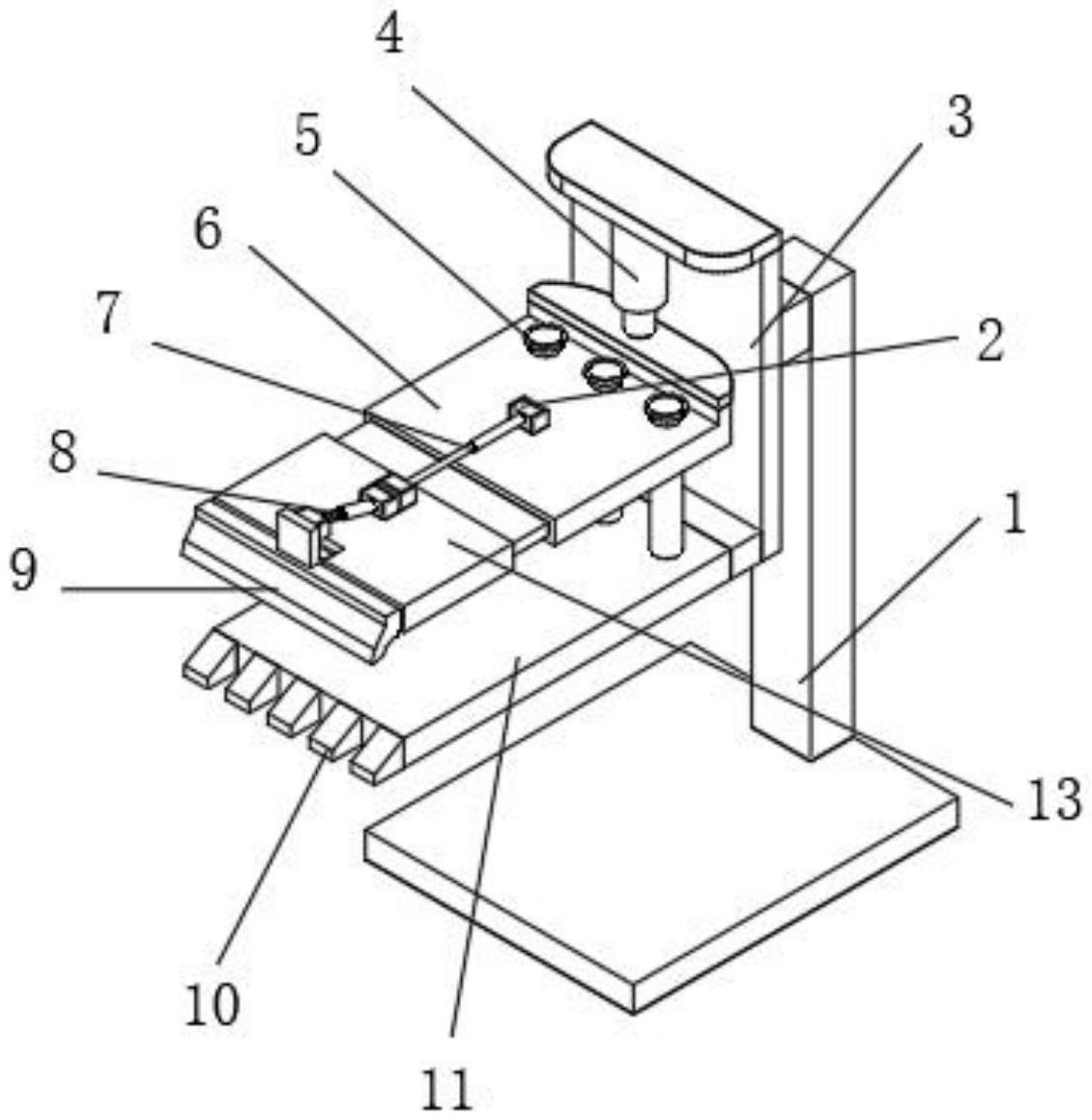
3、一种机械手,包括机械手臂,所述机械手臂一端固定连接有固定板,所述固定板下端固定连接有下夹板,所述下夹板上端固定连接有滑杆,所述滑杆表面滑动连接有第一夹板,所述第一夹板一端滑动连接有第二夹板,所述第二夹板一端转动连接有弯板,所述第一夹板上端一侧与固定板之间固定连接有液压杆。
4、上述技术方案的工作原理如下:
5、液压杆的伸缩端伸出推动第一夹板从而使第二夹板向下移动,此设置可以使第二夹板下端与麻袋上端接触,此时,第二电推杆的伸缩端伸出通过第二活动座,推动弯板在活动槽内部的转轴上转动,此设置可通过弯板将麻袋的另一端卡住,卡住后,第一电推杆的伸缩端收缩,带动第二夹板进入到插槽内,从而将麻袋移动至下夹板的正上方,设置的齿头可以起到斜坡导向的作用,从而使麻袋移动更加的流畅,然后,液压杆的伸缩端持续的伸出,通过第一夹板、第二夹板和下夹板将麻袋夹紧。
6、在进一步的技术方案中,所述第二夹板左侧中部开设有活动槽,所述活动槽中部转轴与弯板一端转动连接。
7、活动槽对弯板起到限位的作用,从而使弯板转动更加的流畅。
8、在进一步的技术方案中,所述弯板表面中部与第二夹板表面均固定连接有第二活动座,两个所述第二活动座中部转动之间转动连接有第二电推杆。
9、第二电推杆的伸缩端伸出通过第二活动座,推动弯板在活动槽内部的转轴上转动,此设置可通过弯板将麻袋的另一端卡住,可以使麻袋移动至下夹板的上端,防止麻袋发生偏移,导致机械手夹取失败。
10、在进一步的技术方案中,所述第二夹板上端右侧中部与第一夹板表面均固定连接有第一活动座,两个所述第一活动座中部转动之间转动连接有第一电推杆。
11、第一电推杆的伸缩端伸出通过第一活动座带动第二夹板在第一夹板的插槽内滑动,此设置可以使第二夹板移动至麻袋的另一端,方便机械手将麻袋夹取。
12、在进一步的技术方案中,所述下夹板一端固定连接有多根齿头,所述第一夹板左侧开设有插槽,所述插槽内表面与第二夹板右端滑动连接。
13、设置的齿头可以起到斜坡导向的作用,从而使麻袋移动更加的流畅,插槽的设置可以对第二夹板进行限位,同时,起到导向的作用。
14、本实用新型的有益效果是:
15、1、通过设置的第一电推杆、第二电推杆、第一夹板、第二夹板和弯板,可以实现麻袋的移动与固定,通过各个部件的配合操作,可以使机械手将麻袋轻松夹取,同时,设置的板状夹板可以有效增加与麻袋之间的接触面积,防止对麻袋造成损坏;
16、2、通过设置的液压杆、下夹板和第一夹板,可以实现机械手的夹取,同时,使机械手夹取麻袋更加的顺利。
技术特征:
1.一种机械手,包括机械手臂,其特征在于:所述机械手臂一端固定连接有固定板,所述固定板下端固定连接有下夹板,所述下夹板上端固定连接有滑杆,所述滑杆表面滑动连接有第一夹板,所述第一夹板一端滑动连接有第二夹板,所述第二夹板一端转动连接有弯板,所述第一夹板上端一侧与固定板之间固定连接有液压杆。
2.根据权利要求1所述的一种机械手,其特征在于:所述第二夹板左侧中部开设有活动槽,所述活动槽中部转轴与弯板一端转动连接。
3.根据权利要求1所述的一种机械手,其特征在于:所述弯板表面中部与第二夹板表面均固定连接有第二活动座,两个所述第二活动座中部转动之间转动连接有第二电推杆。
4.根据权利要求1所述的一种机械手,其特征在于:所述第二夹板上端右侧中部与第一夹板表面均固定连接有第一活动座,两个所述第一活动座中部转动之间转动连接有第一电推杆。
5.根据权利要求1所述的一种机械手,其特征在于:所述下夹板一端固定连接有多根齿头,所述第一夹板左侧开设有插槽,所述插槽内表面与第二夹板右端滑动连接。
技术总结
本技术涉及机械手技术领域的一种机械手,包括机械手臂,所述机械手臂一端固定连接有固定板,所述固定板下端固定连接有下夹板,所述下夹板上端固定连接有滑杆,所述滑杆表面滑动连接有第一夹板,所述第一夹板一端滑动连接有第二夹板,所述第二夹板一端转动连接有弯板,所述第一夹板上端一侧与固定板之间固定连接有液压杆。通过第一夹板、第二夹板和下夹板将麻袋夹紧,夹板采用整个接触面与麻袋接触,因接触面积大夹紧力大不容易导致麻袋损坏,麻袋与机械手接触面受力均匀,防止影响抓包。
技术研发人员:孙天圻,沈益舟,郭宇,宫聚祥,陈德宣
受保护的技术使用者:孙天圻
技术研发日:20221230
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!